波浪能海上試驗平臺的設計可行性研究
2013-08-06 10:58:56侯曉蕊李運霞宋雨澤韓林生
海洋技術學報 2013年2期
侯曉蕊 ,李運霞 ,王 鑫 ,金 鑫 ,路 寬 ,宋雨澤 ,韓林生
(1.天津海油工程技術有限公司,天津300100,2.國家海洋技術中心,天津 300112)
1 開發海洋能的必要性及需求分析
海洋是一個巨大的能源寶庫,包括溫度差能、波浪能、潮汐與潮流能、海流能、鹽度差能、岸外風能、海洋生物能和海洋地熱能等8種,儲存量高達天文數字,是蘊藏于海上、海中、海底的可再生資源,屬新能源范疇。人們可以把這些海洋能以各種手段轉化成電能、機械能或其他形式的能量,供人類使用。
海洋能具有以下特點:
(1)它在海洋總水體中的蘊藏量巨大,而單位體積、單位長度所擁有的能量較小。這就是說,要想得到大能量,就得從大量的海水中獲得。
(2)它具有可再生性。海洋能來源于太陽輻射能與天體間的萬有引力,只要太陽、月球等天體與地球共存,這種能源就會再生,就會取之不盡用之不竭、用之不竭。
圖1 點頭鴨式裝置
(3)海洋能屬于清潔能源,也就是海洋能一旦開發后,其本身對環境污染影響很小。
《國家“十一五”海洋科學和技術發展規劃綱要》中也指出,要“加強海洋科技平臺建設,提高海洋科技基礎能力”,“建設共享的綜合研究試驗平臺”;《國家海洋事業發展綱要》提出“建設國家科技試驗室和海上試驗場等研發平臺”。波浪能、潮流能海上試驗與測試場的建成與投入使用,將大大節省波浪能、潮流能裝置實海況試驗前期調查與海上基礎工程建設的經費與時間,極大推動波浪能、潮流能開發利用技術與產業發展,因此有必要通過國家的專項資金的支持盡快開展相關工作,為我國海洋能事業的發展提供保障與支持。
2 發電設備
鴨式裝置外形像一只巨型的鴨頭,漂浮在海中,在波浪的推動下上下擺動,故名點頭鴨。由于體型比較龐大,運動時能帶動發電裝置產生電流。如圖1所示。
3 海上平臺設計
波浪能試驗平臺為半潛式浮式平臺,如圖2~圖3所示,由旁通、橫撐、立柱、上部結構(操作平臺)及分布式多點系泊系統組成,是一小型半潛式平臺。其所采用的設計、建造、安裝及操作技術均為成熟的工業技術。
系泊系統為4組×3根的分布式系泊系統,單根系泊纜長度為600 m(從導纜孔到錨端),系泊纜由純錨鏈構成,錨鏈公稱直徑為56 mm,系泊錨優先選擇大抓力錨,當海底泥面處為基巖時,用重力錨代替大抓力錨。
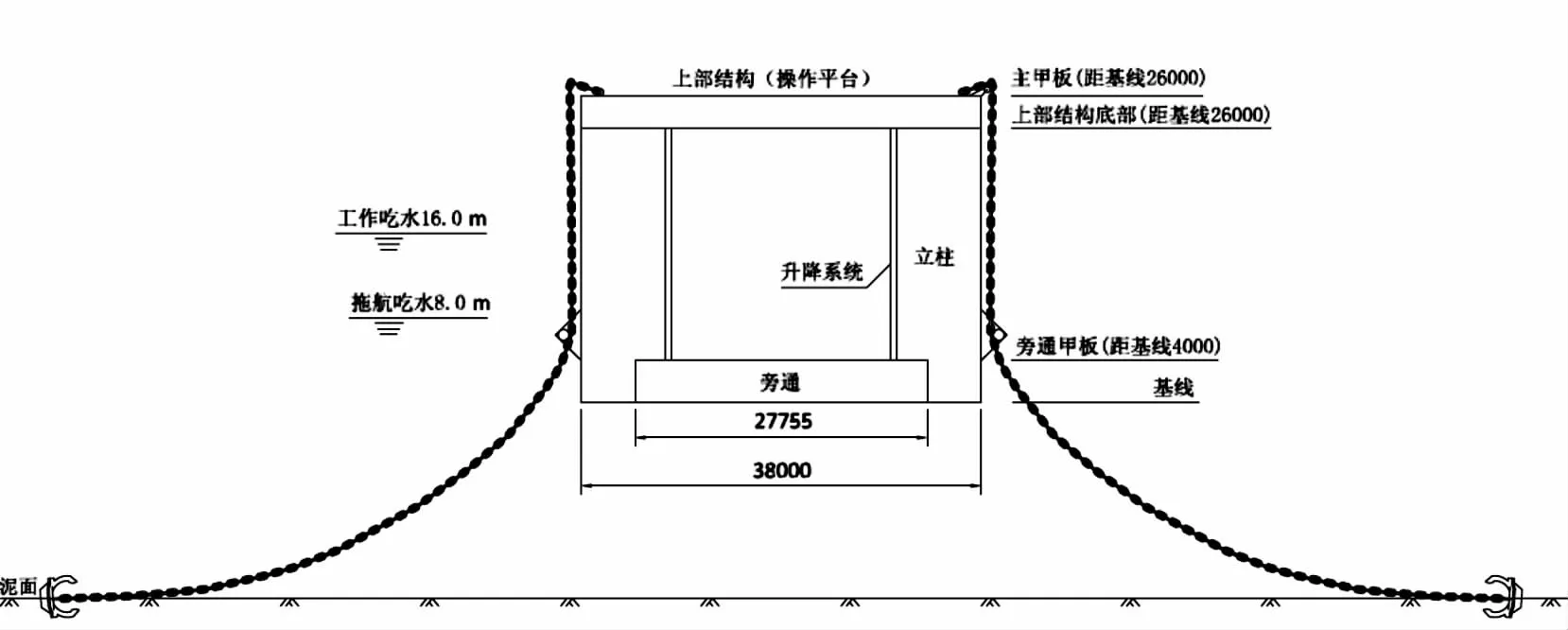
圖2 波浪能試驗平臺(側視圖)
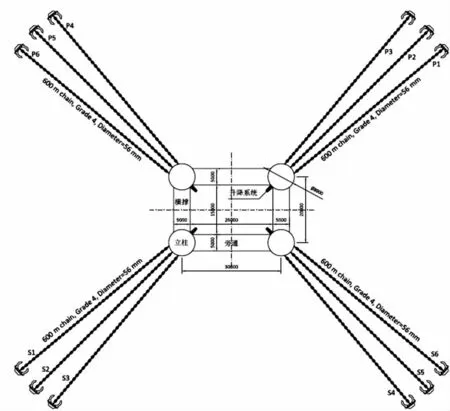
圖3 波浪能試驗平臺(俯視圖)
波浪能發電裝置通過吊裝或拖拉進入半潛式平臺的月池內,發電裝置需要維修或撤離時,通過升降系統提升到操作平臺上進行維修或為撤離做準備。波浪能發電裝置的可利用空間尺寸為25 m×15 m×16 m,供發電裝置設計參考。
4 設計
試驗平臺按照50 m水深進行設計,系泊系統強度按照百年一遇的風暴條件進行設計,設計極端環境條件為:百年一遇極端波浪條件有效波高Hs=7.01 m,有效周期Ts=11.41 s;百年一遇最大風速為36.08 m/s;極端工況流速按2.5 m/s考慮。在本設計階段,考慮到方向性不甚明顯,故按照上述極值來進行試驗平臺各方向的性能分析。分析中保守考慮為風、浪和流為同向,且考慮任意來向的可能性。
除各工況穩性分析之外,還需要針對在位的浮態進行多點系泊系統設計。多點系泊系統系泊纜的受力安全系數遵循美國石油學會的《浮式結構物定位系統設計與分析》規定。具體安全系數如表1所示。
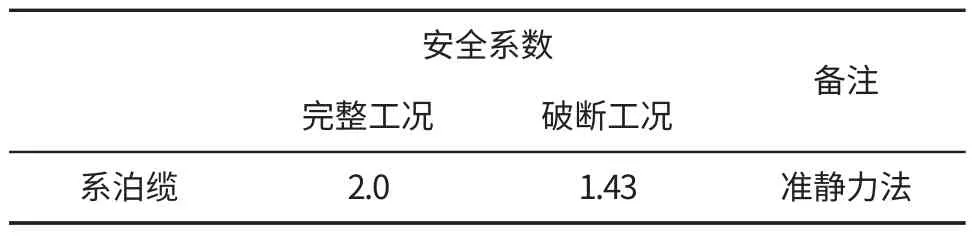
表1 系泊纜設計安全系數
4.1 平臺設計參數
平臺設計的主尺度如表2所示。
其坐標系參照圖4所示,平臺的原點為浮體基線平面的形心,Z 軸方向為垂直向上。
4.2 拖航階段穩性分析
試驗平臺濕拖時,其重量重心等數據如表3所示。
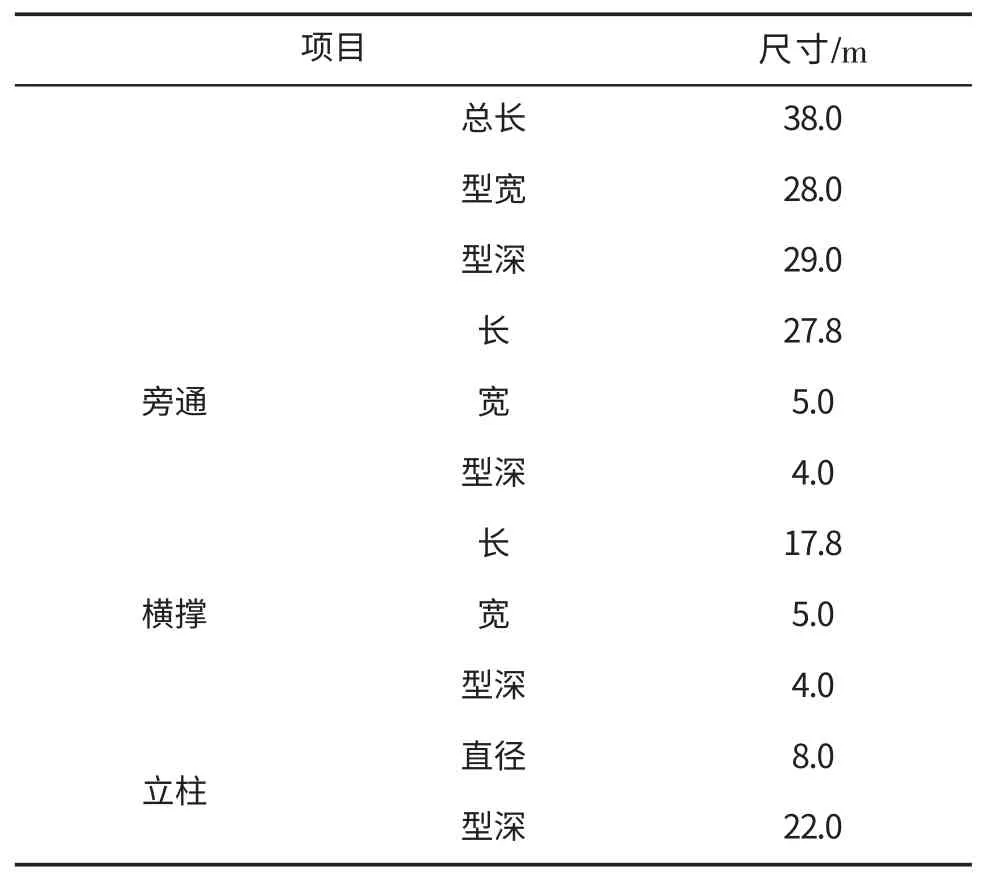
表2 試驗平臺主尺度
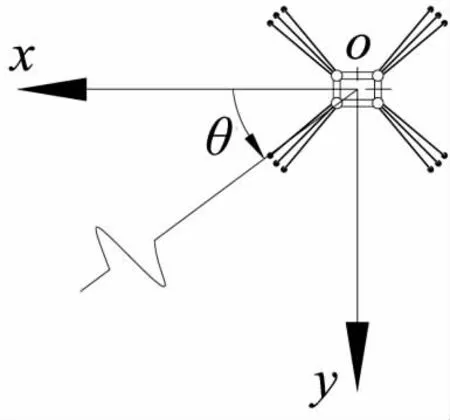
圖4 坐標系統和環境條件方向
考慮到平臺的對稱性,僅僅考慮0~90°范圍內的完整穩性工況,選擇0°、45°、90°三個特征角度作為參考軸計算平臺拖航時的穩性。穩性計算考慮的風速為100 kn,3個工況的穩性計算結果如表4所示。
穩性計算結果表明,該平臺具有較好的拖航穩性,可以看出,除初穩心高度外,其他穩性指標都有較大的余量,這也符合大家對半潛式平臺的預期,即:小的GM 值保證較好的運動性能,且整體穩性較好。穩性分析結果表明,在無合適的半潛駁船供平臺干拖作業時,可以采取濕拖的拖航方式。

表3 拖航工況重量參數
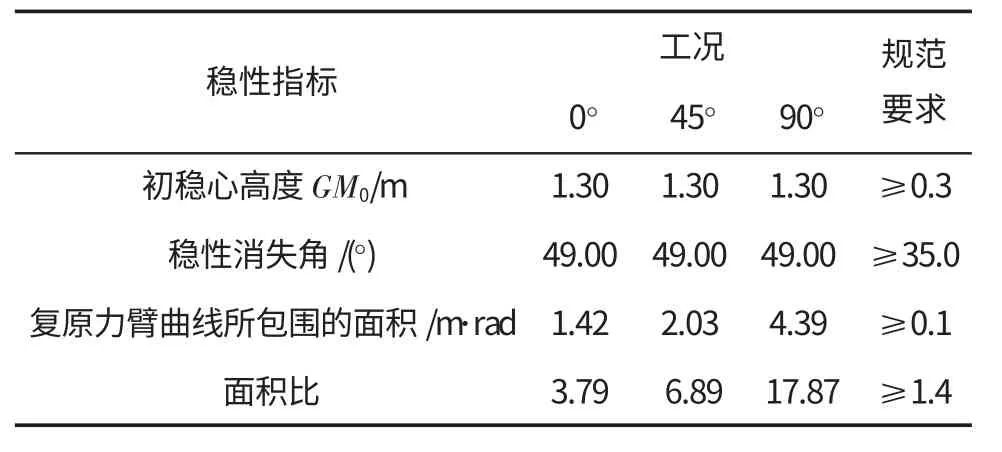
表4 拖航穩性分析結果
4.3 在位階段穩性分析
當平臺在試驗場地安裝就位后,可以進行波浪能發電試驗,需要校核發電裝置在作業和維修期間(其浮態和重心與自存工況類似)的穩性,考慮到作業狀態平臺整體重心低,穩性較維修更好,故在總體方案設計階段僅分析維修期間的穩性,維修階段的穩性要是滿足要求,操作狀態必然滿足要求。平臺在位時,發電裝置維修時(簡稱在位維修工況)的平臺重量重心等數據如表5所示。
考慮到平臺的對稱性,僅僅考慮0~90°范圍內的完整穩性工況,選擇0°、45°、90°三個特征角度作為參考軸計算平臺在位維修工況的穩性。穩性計算考慮的風速為100 kn,3個工況的穩性計算結果如表6所示。
穩性計算結果表明,該平臺具有較好的在位穩性。除了初穩心高度和面積比兩個規范要求的指標外,其他穩性指標也非常好,這里就不再一一羅列。

表5 在位維修工況重量參數

表6 在位維修工況穩性分析結果
4.4 水動力分析結果
根據SESAM/GENIE建立的水動力濕表面模型,在MOSES用三維繞射方法進行頻域水動力分析。從水動力計算結果來看,相對于平臺的排水量,本實驗平臺計算得到的附加質量較小,這與平臺的型式有關,相對普通船型,半潛式平臺通常有較小的附加質量系數和初穩心高。從波浪力計算的結果來看,去除部分不規則頻率對應的結果(MOSES沒有自動去除不規則頻率的功能),試驗平臺的波浪力達到波幅約(160~250)t/m。這么大的波浪力為極端工況的系泊系統設計帶來挑戰。
從運動響應幅子(RAO)的結果來看,升沉RAO是典型的半潛式平臺的升沉RAO,所不同的是,其兩個峰值的固有周期較一般半潛式平臺小,主要原因在于尺度的差異。其橫搖和縱搖運動的幅值在波浪周期內較小。這就保證了在發電裝置工作時試驗平臺有較好的運動性能。
4.5 系泊分析結果
根據上述方法,得到試驗平臺的系泊系統的設計方案,系泊系統為4組×3根的分布式系泊系統,單根系泊纜長度為600 m(從導纜孔到錨端),系泊纜由純錨鏈構成,錨鏈公稱直徑為56 mm(破斷負荷為346.5 t),系泊錨優先選擇大抓力錨,當海底泥面處為基巖時,用重力錨代替大抓力錨。
根據完整狀態系泊分析結果,選擇浪向90°工況下S2纜破斷,分析破損狀態下系泊系統受力和運動。計算結果如表7所示。

表7 破損狀態下系泊系統受力和運動結果
根據系泊分析結果,完整狀態最小安全系數為2.03,破損狀態的最小安全系數為1.56,且均沒有上拔力出現,滿足規范的要求。根據以往的系泊分析經驗,在如此水深以及極端環境條件作用下,準靜力法與全動力法計算的結果會比較接近。根據系泊力進行錨的選擇,選擇18 t左右的大抓力錨可以滿足項目的需求。在硬質巖石區域,需要選擇重力錨才能滿足要求。
5 結論
根據設計基礎和波浪能發電的需求,設計出本實驗平臺的形式——半潛式平臺。根據穩性、運動性能以及發電裝置尺寸等關鍵性能參數的需要,確定了平臺的主尺度。根據極端環境條件,設計了系泊系統。分析結果表明,本設計方案技術可行,且安全可靠。
[1]戴仰山,沈進威,宋競正.船舶波浪荷載[M].北京:國防工業出版社,2007.
[2]國家發展和改革委員會.SY/T10030-2004.海上固定平臺規劃、設計和建造的推薦做法工作應力設計法[S].北京:石油工業出版社,2004.
[3]中華人民共和國交通運輸部.JTS144-1-2010.港口工程荷載規范[S].北京:人民交通出版社,2010.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06