多項式預測濾波技術在智能控制中的應用
2013-08-08 09:52:46董勁男1邢千里1班孝林2
長春師范大學學報 2013年4期
董勁男1,邢千里1,班孝林2
(1.吉林大學計算機科學與技術學院,吉林長春 130012;2.深圳機場擴建工程指揮部,廣東深圳 518000)
1 多項式預測濾波技術
1.1 理論依據及應用條件
信號預測技術一般可分為兩類:隨機信號預測方法和確定性信號預測方法。一般的噪聲都是隨機信號,它無法用數學關系式表達,只能用概率和數理統計的方法描述。目前常用的處理方法是采用一些相當成熟的線性預測方法,如牛頓型預測器。對于確定性信號預測也可以應用牛頓型預測器、FIR預測器、IIR預測器、神經網絡預測器[1]和模糊系統預測器[2]等。
多項式預測濾波技術可以應用在平滑的實際信號采樣處理過程中。將平滑信號建模為多項式信號模型并作為多項式預測濾波器的處理對象,是基于兩點原因:首先,假定采樣速率足夠大,所有客觀存在的信號會表現出類似分段多項式的特征;其次,基于多項式的信號處理計算效率高[3]。從定義上看,多項式預測濾波器能夠估計類似多項式形式的信號的未來值。因此,對多項式預測濾波器的研究,其潛在應用涵蓋了處理大量敏感度量的操作延遲和網絡傳輸延遲,如:溫度、位置、電壓和功率等,尤其是在智能控制工程領域應用前景廣泛。
1.2 無限脈沖響應(IIR)多項式預測器
通常來說,基于N個過去時刻的信號采樣和M個過去預測器輸出的向后p時步的IIR多項式預測器表達式如下[3]:

其中n為離散時間,B(k)和A(M)分別是IIR預測器的前向反饋和后向反饋的系數,y(n)是預測器輸入信號,上標表示為估計值。其白噪聲增益表示為:

其中H(ejω)=B(ejω)/[1+A(ejω)]為轉換函數。需要指出的是,當舍去后向反饋部分,保留前向反饋部分,IIR預測濾波器就變換為我們下面將要介紹的FIR多項式預測濾波器。
1.3 有限脈沖響應(FIR)多項式預測器
有限脈沖響應是指單位脈沖響應函數為有限多項式,且輸出只和前些時刻的輸入有關系。有限脈沖響應(FIR)多項式預測器利用最近N(N為預測濾波器長度)個輸入信號采樣值外推未來時刻信號值。預測器的最小長度為M+1,當時N>M+1,多余的自由次可以被用來最小化白噪聲。其表達式為:

其白噪增益表示為:

利用多項式信號模型和公式(3),并在公式(4)取最小值的約束下,利用拉格朗日乘子得到響應函數h(k)的推導公式:
當M=1,p=1時

由推導公式(5)可以看出,濾波器的系數不依賴于輸入信號,而是由N、M和p值決定的。同樣的方法也可以用來構造FIR多項式微分器和正弦預測器,推導公式與多項式預測器類似。
FIR多項式濾波器可以看作是一個數據平滑濾波器的擴展[4],使用低次多項式模型的FIR預測濾波器頻率范圍很窄,導致大多數的能量都集中在0頻率附近。其缺點是旁帶增益大,會干擾閉環控制;并且當濾波器長度很小的情況下,其止帶增益非常大。為了緩解這種缺點帶來的影響,可以使用面向特定應用設計的IIR低通濾波器。具體方法參見第三部分的相關論述。在實際應用中,多項式的次數I=0,1,2對于大多是信號的建模是足夠的,高次的多項式預測器通常會出現高的旁帶峰值增益和白噪聲衰減差的現象,并且設計適用于高次多項式的幅度響應定形反饋難度很大[5]。
擴充型FIR預測濾波器[6]的基本思想是:用輸入信號真實值和預測輸入信號的加權和平滑輸入信號,在預測的每一個時步內都將這種平滑后的信號值最為預測所用的信號值。優點是當預測器次數很小時仍能保證有效地減少旁帶增益峰值并加強止帶增益的衰減。
1.4 非線性自適應預測濾波器
當背景噪聲是高斯噪聲時,線性預測方法是最佳的。而對于非高斯噪聲,Vijayan和Poor[7]提出了一種擴頻通信抗窄帶干擾抑制的非線性自適應預測濾波方法,用最小均方算法(LMS)和近似梯度算法更新濾波器的系數,能較好地預測窄帶干擾信號,從而提高了系統的性能。張家樹等[8]提出了一種非線性Laguerre自適應預測濾波器來抑制直擴頻通信窄帶干擾的方法。使用具有IIR和FIR濾波器特點的Laguerre時延單元取代非線性橫向濾波器中的延遲單元z-1,構建了一種基于Laguerre橫向結構的非線性自適應預測濾波器,既可以以較少參數模擬長脈沖響應,避免過參數估計問題,又可以保證收斂的穩定性。
2 應用
預測濾波器在設備控制領域和無線通訊領域都得到了廣泛的應用。尤其是在汽車控制方面,預測濾波器能彌補傳統光感脈沖編碼器的精度問題[9-10],允許設備在較小的采樣速率下或者采樣可能丟失的環境下實現高精度的狀態檢測,如速度、加速度和位移等;在無線通訊領域則體現在對CDMA閉環控制的補償方面,通過預測可能的發送功率和接受功率,實現信道的充分利用,增加潛在的用戶[3]。下面分類介紹多項式預測濾波器的應用。
2.1 速度測量
在車輛速度控制的研究中[11],速度曲線可以近似為二次多項式。在高速的情況下,速度可以被高精度地估計出來。但在減速過程中,速度采樣間的時間差分過大,超出了適用的采樣周期,造成較大的預測誤差。傳統的傳感器無法進行高精度的采樣,且使用高精度傳感器的成本過高。解決的方法是采用如下的預測控制策略:在采樣值可用時,直接使用該采樣值;當最新采樣缺失時,則使用預測器預測出來的信號值。由此,預測器能夠極大程度地彌補地精度傳感器造成的控制偏差(圖3)。
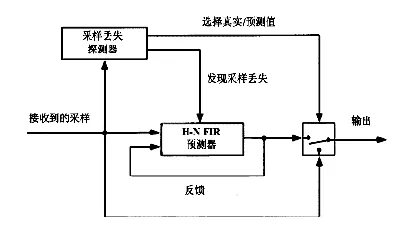
圖3 速度采樣預測器示意圖
2.2 加速度測量
加速度在汽車控制中起到了很重要的作用,可以改善穩定機械系統的瞬時性能[12]和操控的強健性[13]。一般的加速度傳感器過于昂貴,且在噪聲環境下不穩定。利用向后差分器直接從速度信號求導得到的加速度信號[14-15]的準確度無法達到應用的需要,而采用數字微分濾波器雖然能夠衰減噪聲,但同時造成的延時破壞了系統的實時性[16]。解決的辦法是引入一個由向后差分器、RLSN預測器[11]或預測FIR微分器[17]組成的級聯。另外一種方法是首先使用遞歸微分器過濾速度信號,然后利用2個連續速度采樣的差分得到加速度[18]。
2.3 控制延遲的補償
計算處理時間延遲會破壞控制系統的性能,尤其是采樣間隔小于時變計算延遲的時候,會導致采樣的丟失。基于這個考量,引入附加的預測機制,使得控制閉環變得完整和可靠。例如:在文獻[19]中,提出使用一個近似全通的濾波器預測補償計算延遲;在醫學信號處理和音頻信號的恢復中使用均分濾波器和多項式預測濾波器[20]。
2.4 無線移動通訊系統中的應用
通過減少閉環發射器功率控制延遲可以增加移動CDMA通訊系統的用戶容量[3,21]。假設無線通訊信道在一段時間是相互關聯的,信道衰減變化記錄可以用來預測信道的特性。使用預測濾波技術對可能接收到的功率級別進行估計,并確定閉環發射器功率控制系統的適度微調選擇時機,可極大程度地改善信道的利用率,具體實現見圖4。

圖4 多項式預測濾波器在CDMA通訊系統中的應用示意圖
3 多項式預測濾波器存在的問題及改進方法
基于多項式的預測信號處理是一個眾所周知的技術,但自身的缺點嚴重阻礙了其應用的推廣:多項式預測濾波器對白噪聲的衰減效果差,并表現出相當可觀的濾波通帶增益峰值。經過多年不斷研究和改進,多項式預測濾波器的應用條件已經非常成熟,其中以使用面向特定應用的低通預濾波器的方法最為常用。
弱噪聲衰減特性的改善可以通過兩種途徑:一種是引入一個由兩個或兩個以上濾波器(其原理同預濾波方法)或者多項式估計器和預測器組成的級聯來改進[22-23]。另一種方法是在多項式濾波器中引入幅度響應定形反饋[6,17,24],將可以改進噪聲衰減特性的IIR濾波器擴展到FIR預測濾波器中,這種擴展保持了FIR預測濾波器的特性。在設計多項式預測濾波器時,定點表示給系數帶來的影響必須要考慮,因為由此產生的舍入噪聲[25]往往會破壞預測濾波器的適用條件。引入量化誤差反饋能夠很好地緩解由于算術計算量化產生的不良影響[26-27]。采用通用參數自適應機制[28]對FIR多項式系數進行適度微調[29],擴大多項式FIR多項式預測器的適用范圍。通用參數自適應機制是由加到每一個FIR預測濾波器系數并不斷更新的簡單參數實現的。
4 結論
多項式預測濾波技術發展已經相當成熟,并成功地應用到包括電子汽車控制、儀表控制和無線通訊網絡等多個領域中。控制系統網絡、傳感器網絡等一些新型的網絡中傳輸的信息絕大部分是由傳感器測取的(或是傳到執行機構的)實時信號,其時間特性對用戶至關重要。而網絡環境的不確定性所造成的傳輸延遲和數據丟失等情況極大地制約了網絡控制系統的發展。基于對預測濾波理論的研究和對多個成功應用實例的分析,將這種技術應用到網絡控制系統的設計和分析中是可行的。
[1]B.Kosko,FuzzyEngineering,Upper Saddle River[M].NJ:Prentice-Hall,1997.
[2]Pekka Heinonen,YrjoNeuvo.FIR-Median Hybrid Filters with Predictive FIR Substructures[J].IEEE Transactions on Acoustics,Speech,and Signal Processing,1988,36(6):892-899.
[3]S.J.Ovaska,Newton-type predictors-Asignal processingoriented algorithmviewpoint[J].Signal Process,1991,25:251-257.
[4]P.T.Harju,S.J.Ovaska,Optimization ofIIR polynomial predictive filter magnitude response[J].Signal Processing,1997,56:219-232.
[5]Ovaska,SeppoJ,Olli Vainio,LaaksoTimoI.Design ofPredictive IIR Filters Via Feedback Extension ofFIR Forward Predictors[J].IEEE Transactions on Instrumentation and Measurement,1997,46(5):1196-1201.
[6]S.S.Rao.Optimization Theoryand Applications[M].2nd ed.NewDelhi,India:Wiley,1984.
[7]黃高勇,張家樹.一種抑制直擴通信窄帶干擾的新型非線性自適應預測濾波器[J].電子與信息學報,1999,29(6):1328-1331.
[8]Ovaska,SeppoJ.Improvingthe velocitysensingresolution ofpulse encoders byFIR prediction[J].IEEE Transactions on Instrumentation and Measurement,1991,40(3):657-658.
[9]劉清.考慮測量噪聲的傳感器動態測量誤差補償[J].江蘇大學學報:自然科學版,2006,27(2):160-163.
[10]Sami Valiviita,Ovaska,SeppoJ.Delayless acceleration measurement method for elevator control[J].IEEE Transactions on Industrial Electronics,1998,45(2):364-366.
[11]Vainio,S.J.Ovaska.Tachometer signal smoothingwith analogdiscrete-time polynomial estimator[J].IEEE Trans.Ind.Electron.,1994,41:147-154.
[12]P.B.Schmidt and R.D.Lorenz,Design principles and implementation ofacceleration feedback toimprove performance ofdc drivers[J].IEEE Trans.Ind.Applicat.1992,28:594-599.
[13]G.P.Hancke and C.F.T.Viljoen.The microprocessor measurement oflowvalues ofrotational speed and acceleration[J].IEEE Trans.Instrum.Meas.,1990,39:1014-1017.
[14]H.Kadhim,T.K.M.Babu,and D.O’Kelly.Measurement ofsteadystate and transient load-angle,angular velocity,and acceleration usingan optical encoder[J].IEEE Trans.Instrum.Meas.,1992,41:486-489.
[15]Olli Vainio,Markku Renfors,TapioSaramaki.Recursive implementation ofFIR differentiators with optimumnoise attenuation[J].IEEE Instrumentation and Measurement TechnologyConference,1996(1):344-349.
[16]Sami Valiviita,Ovaska,SeppoJ.Delayless recursive differentiator with efficient noise attenuation for motion control applications[J].IECONProceedings(Industrial Electronics Conference),1998(3):1481-1486.
[17]S.J.Ovaska and O.Vainio.Predictive compensation oftime-varyingcomputingdelayon real-time control systems[J].IEEE Trans.Contr.Syst.Technol,1997,5:523-526.
[18]Vijayan R and Poor H V,Nonlinear technique for interference suppression in spread spectrumsystems[J].IEEE Trans.On Commun.,1990,38(7):1060-1065.
[19]T.Lipping,P.Loula,V.Jantti,and A.Yli-Hankala,DC-level detection ofburst-suppression EEG[J].Methods Inf.Med.1994,33:35-38.
[20]J.M.A.Tanskanen,A.Huang,T.I.Laakso,and S.J.Ovaska,Prediction ofreceived signal power in CDMAcellular systems[C].In Proc.45th IEEE Vehicular TechnologyConf.,Chicago,IL,1995:922-926.
[21]P.H ndel,P.Tichavsk,Asymptotic noise gain ofpolynomial predictors[J].Signal Processing,1997,62:247-250.
[22]J.A.Honkanen,T.I.Laakso,S.J.Ovaska.Lowpass IIR predictor for discrete-time signal processing[J].Digital Signal Process.,1995(5):133-139.
[23]L.B.Jackson.Digital Filters and Signal Processing:with MATLABexercises[M].Norwel,MA,USA:Kluwer Academic Publishers,1997.
[24]Sami Valiviita,SeppoJ.Ovaska,Olli Vainio.Polynomial Predictive Filteringin Control Instrumentation:AReview[J].IEEE Transactions on industrial electronics,1999,46(5):876-888.
[26]P.T.Harju,Roundoffnoise properties ofIIR polynomial predictive filters[C].In Proc.1997 IEEE Instrumentation and Measurement TechnologyConference,Ottawa,Canada,1997:66-71.
[27]J.M.A.Tanskanen and V.S.Dimitrov.Round-offError Free Fixed-Point Design ofPolynomial FIR Predictors and Predictive FIR Differentiators[J].Digital Signal Processing,AReviewJournal,2000(8).
[28]A.Ashimovand D.J.Syzdykov.Identification ofhigh dimensional systembythe general parameter method[C].In Preprints 8th Triennial World Congress ofIFAC,Vol.IV,Kyoto,Japan,1981:32-37.
[29]J.M.A.Tanskanen,O.Vainio,and S.J.Ovaska.Adaptive general parameter extension for tuningFIR predictors[C].In Proc.2nd IFACWorkshop on Linear Time DelaySystems,Ancona,Italy,Sept.2000:42-47.
[30]J.G.Proakis,D.G.Manolakis.Digital Signal Processing:Principles,Algorithms,and Applications[M].NewYork,NY,USA:Macmillan PublishingCompany,1992.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12