車輛可控性評價研究
2013-08-14 05:42:40曹偉國
河南科技 2013年14期
向 飛 曹偉國
(裝甲兵工程學院 機械工程系,北京 100072)
對普通機器而言,能客觀地觀察及預言該機器的性能和功能,從而客觀地進行評價。而對于車輛而言,其性能僅僅由駕駛員直接操縱得以發揮,因而對其可控性的來說,駕駛員個人的主觀評價尤為重要。迄今為止,尚無推導車輛可控性的理論方法,只能基于一些案例及其經驗的研究方法進行分析。
1 車輛可控性研究方法
目前,解析表達車輛的可控性的理論方法尚未建立,甚至還沒有一套通用的方法,以用于分析駕駛員人主觀評價及量化表達車輛運動特性與其可控性評價之間的關系。因此,主要有三種方法被研究者采用,如圖1所示,且每一種方法相應地適用于不同的具體情況。
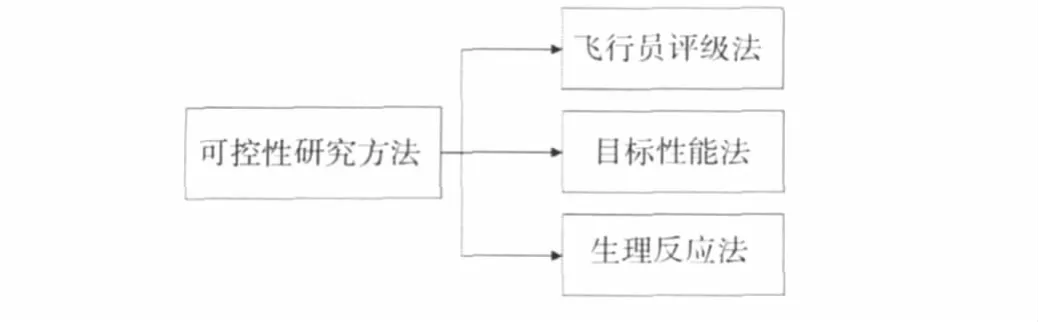
圖1 車輛可控性研究方法
1.1 飛行員評級法
在飛機領域,作為定量表達飛行員對操縱穩定性主觀評價的方法,即飛行員評價法(PR),被廣泛應用。經過改進后,現已成為飛機操縱穩定性的通用評價方法。在設計“易于操縱的飛機”,即對飛機操縱性改進方面,發揮了重要作用[1]。
以PR為雛形,有人嘗試通過駕駛員評級來度量對車輛可控性的主觀評價。具體做法是:通過改變車輛的運動特性,然后進行實車試驗,并由駕駛員給可控性進行評分。據此,系統地研究這些評分,以試圖在一定程度上弄清車輛特性與其可控性之間的關系。由于車輛可控性最終體現于駕駛員個人的主觀評價,因此,這種方法應該是最實際、最直接的。然而,該方法畢竟易受給出評價者個人差異的影響,因此,所得出的結果客觀性、通用性較差。此外,如果總是用這樣的方法,會為車輛運動特性與可控性的理論推導帶來困難。而且,當車輛運動特性發生變化時,其可控制性也將難以預先判斷。
1.2 目標性能法
另一種評價車輛可控性的方法是目標性能法。即:預先設定車輛的目標途徑,然后進行實車試驗來評價車輛的可控性。例如:觀察車輛如何在某速度下、在某時間段內精確無誤地通過設定的試驗路程。目標性能法的優點是結果客觀,但問題包括如何設定目標路徑、如何評價所得的結果、是否能與駕駛員的主觀評價結果很好的對應起來。況且,推導車輛運動特性與可控性關系的理論研究也較為困難。
1.3 駕駛員生理反應法
還有一種評價車輛可控性的方法,即測量駕駛人的生理反應,如駕駛員工作負荷的心律、能量代謝、通過皮膚電流測得的發汗量等。通過系統地改變車輛的運動特性,研究駕駛員生理的反應變化,以找出使車輛易于控制的車輛特性。然而,即使這種方法能獲得可觀的測量結果,但其數據本身易受到干擾因素的影響且駕駛員生理反應與車輛可控性之間確定性關系也不容易建立。
以上三種方法,都是由試驗考察當車輛運動特性改變時,駕駛員對其可控性的評價方法。通過改變車輛運動特性,并研究車輛相應的可控性,有可能通過這些方法建立經驗法則,在一定程度上找出車輛運動特性與其可控性之間的關系。同時,還能知道當車輛的運動特性發生改變時候時,如何預測車輛的操縱性。
然而,即使迄今為止尚未建立車輛可控性的一般通用方法。
2 車輛可控性影響因素
車輛可控性與車輛轉向特性,車輛動力學特性和車輛轉向瞬態響應參數都有一定關系,其相關性的研究有助于建立車輛可控性評價理論。
2.1 車輛轉向特性
車輛的轉向特性是影響車輛運動特性的一個重要因素。因此,首先研究車輛轉向特性與其可控制性的關系。根據測量可知[2]:駕駛具有US特性車輛時駕駛人的心律120次/min左右,而駕駛員具有OS特性的車輛時,心律130~140次/min之間,意次味著與US駕駛特性的車輛相比,駕駛員駕駛OS特性車輛的工作負荷會更大。由此,可推斷具有US特性的車輛比具有OS特性的車輛更易于控制。
穩定性因子A是評價車輛US/OS特性強弱的指標,其計算公式如下:

經過試驗分析,可知:車輛US特性越強,車輛越易于控制。然而,車輛穩定性因子A表示的是車輛轉向特性,也是唯一直接影響車輛穩態特性的因素。但是,如果車輛的轉向特性改變了,車輛所固有的動力學特性也會隨之改變。而且,除了轉向特性,其他因素也會影響車輛的動力學特性。因此,僅靠車輛的轉向特性就來判斷其可控性未必合適,不能簡單得具有結論,說具有US特性的車輛更易于控制。
2.2 車輛動力學特性
車輛動力學特性包括車輛垂向、縱向和橫向動力學特性。研究車輛可控性問時,主要考慮車輛的側向動力學特性。
對一輛原本就是直線行駛車輛,若突然給其轉向盤一個固定的側向轉角,然后松手,那么對一輛穩定的車輛而言,將在經歷一些振動性的橫擺運動后趨于穩態。這種情況下,決定車輛運動特性的指標之一是橫擺阻尼,它受到車輛轉向特性、轉向系統特性及車身側傾的影響。以兩自由度模型描述的車輛側向運動,得到理論上的系統國有頻率wn和阻尼比ζ表達式如下:

美國的林克通過實驗證明[3]:阻尼比相同時,車輛的固有頻率越小,車輛的可控評級越不好。車輛固有頻率與橫擺阻尼比相比與可控性關聯度更大。另外,美國霍夫曼等人研究表明:隨著側偏響應時間的增加,車輛變得更加難以控制。但僅以車輛的運動特性表達來評價車輛的可控制性還是不夠的。
2.3 車輛轉向瞬態響應參數
車輛轉向時,對轉向輸入的車輛橫擺角速度響應參數包括響應時間tt和增益常數G。威爾等人對實際車輛的響應時間tr和增益常數G等效值進行了測量,并研究了兩者與車輛可控性的關系。實驗發現對于增益常數G,不同的駕駛員其偏好的數值范圍不同;響應時間范圍,越熟練的駕駛員,其適應的響應時間范圍越大。另外,伯格曼等人還研究了車輛側向加速度增益Gy和側向響應時間ty與可控性之間的關系。實驗表明:相比側向加速度增益常數,車輛運動的側偏響應時間對車輛的可控性敏感程度更高。
通過考察車輛可控性以及兩個反應運動特性的參數,可以較好地理解車輛可控性與車輛運動特性之間的關系。但如何表達車輛可控性這個問題,還無法保證應考慮哪些運動特性。因此,當主導車輛的參數發生變化,也不能輕言車輛就是易控的。
3 基于駕駛員模型的車輛可控性評價
到目前為止,對量化測量實際駕駛人對車輛可控性的評價,仍然沒有如飛機的飛行員評級法那樣精確、全面的通用方法。但在車輛轉彎過程中,駕駛員會自適應于車輛不同特性,從而改變他自身的參數,由此可以認為,駕駛員參數可以反映車輛的操縱特性。因此,可以考慮是否可能基于駕駛員模型來考察來評價車輛的可控性[4]。
可以利用實驗數據,通過采用駕駛員參數辨識的方法,試圖表明駕駛員是如何隨著車輛運動特性的變化去調整其自身參數的。駕駛員人-車輛模型如圖2[5]。
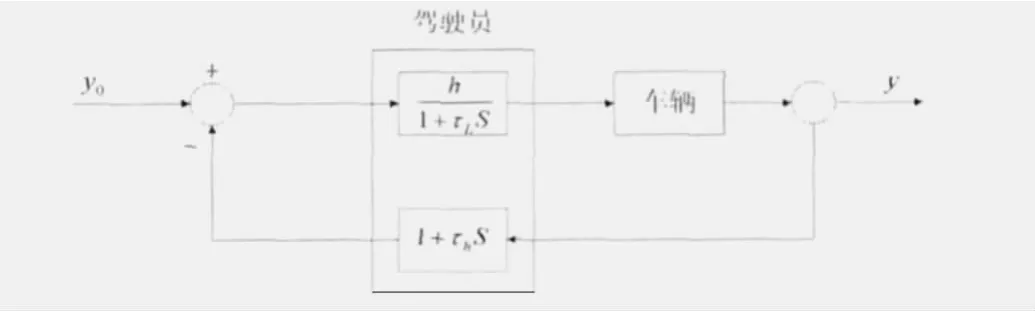
圖2 簡化駕駛員人-車輛模型框圖
駕駛員模型主要由參數三個決定,車輛前視和微分動作的綜合效果參數τh,駕駛員響應延遲時間τL和比例因子h。y0為前方L處目標路徑,y為前方L處的,車輛位置,駕駛員基于預估的目標路徑,通過轉向操縱,使車輛達到目標位置。駕駛員模型中,參數h和τL代表駕駛員的響應性,參數τh表示駕駛員的微分動作程度。對于駕駛員說要使微分時間越小,駕駛員感覺車輛越容易。基于該模型,一旦得到駕駛員模型的辯識參數,就可以利用這些辯識參數推導出由駕駛員評價的車輛可控性。
[1]喻凡.車輛操縱動力學[M].北京:機械工業出版社,2012.
[2]T.Nakatsuka.Vehicle safety in high speed driving and human characteristics[J].The Japanese Journal od Ergonomics,Vol.4,No.4,1968.
[3]W.Linke etal.Analysis on vehicle running stability subjected to side wind on high way[J].Proceedings of Annual Meeting of JASE,No.761,1976.
[4]M.Abe et al.A study on vehicle handling evaluation through model based driber behavior[J].Proceedings of FISITA 2008,Munish September 2008,in CD.
[5]郭孔輝.汽車操縱動力學[M].長春:吉林科技出版社,1991.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
石油瀝青(2021年4期)2021-10-14 08:50:44
公民與法治(2016年4期)2016-05-17 04:09:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
