空中機(jī)動(dòng)平臺(tái)光電吊艙對(duì)目標(biāo)定位方法分析*
2013-08-18 03:28:00張建強(qiáng)
關(guān)鍵詞:方法
黃 亮 張建強(qiáng) 劉 忠
(海軍工程大學(xué)電子工程學(xué)院 武漢 430033)
0 引 言
光電跟蹤探測(cè)系統(tǒng)以其被動(dòng)隱蔽、不受電磁干擾、精度高等優(yōu)點(diǎn)而成為現(xiàn)代軍事警戒探測(cè)系統(tǒng)的重要手段之一.但由于目標(biāo)輻射在地球表面的傳播特性、地球曲率半徑以及光傳播的直線性等因素的影響,使岸基和艦載光電跟蹤探測(cè)系統(tǒng)的作用距離受到了限制,從而制約了光電裝備潛能的充分發(fā)揮.
受到星載光電系統(tǒng)的啟發(fā),20世紀(jì)80年代中期以來(lái),世界各國(guó)紛紛發(fā)展各類基于空中機(jī)動(dòng)平臺(tái)的光電系統(tǒng),例如預(yù)警機(jī)的遠(yuǎn)程預(yù)警吊艙、直升機(jī)的反潛吊艙等.光電吊艙的出現(xiàn)彌補(bǔ)了上述光電探測(cè)系統(tǒng)的不足,給光電跟蹤和探測(cè)技術(shù)開辟了一個(gè)新的應(yīng)用領(lǐng)域[1].
光電吊艙可精確測(cè)量地面目標(biāo)或空間目標(biāo)相對(duì)空中平臺(tái)的方位角和俯仰角,再結(jié)合空中平臺(tái)的GPS位置信息,就可以實(shí)現(xiàn)對(duì)目標(biāo)運(yùn)動(dòng)參數(shù)的解算.在此應(yīng)用背景下,傳統(tǒng)的對(duì)目標(biāo)定位的三角幾何定位方法,雖然算法簡(jiǎn)單、易于實(shí)現(xiàn),但定位精度不高,而且只能定位海面目標(biāo).文獻(xiàn)[2]提出了用正弦定理的幾何關(guān)系測(cè)距、然后對(duì)目標(biāo)定位的原理,由于是用物理的單站來(lái)實(shí)現(xiàn)體制上的虛擬多站,所以只能跟蹤海面慢速目標(biāo).文獻(xiàn)[3-4]利用時(shí)差定位方法分析了機(jī)載雷達(dá)對(duì)超視距目標(biāo)定位的情形,但需測(cè)得雷達(dá)對(duì)目標(biāo)的徑向距離,而且是在多觀測(cè)站情況下定位,布置復(fù)雜,不易實(shí)施.文獻(xiàn)[5]使用測(cè)向交叉定位算法,卻僅針對(duì)二維條件下.此外,可應(yīng)用卡爾曼濾波及其拓展濾波(如 EKF,UKF 等)[6-9]分析目標(biāo)運(yùn)動(dòng),但需初始化系統(tǒng)的動(dòng)態(tài)特性,若參數(shù)選擇不當(dāng),將嚴(yán)重影響定位精度.
因此,針對(duì)單個(gè)空中機(jī)動(dòng)觀測(cè)平臺(tái)對(duì)目標(biāo)定位的情形,本文首先分析了傳統(tǒng)的三角幾何定位方法的不足,并提出了一種基于最小二乘的目標(biāo)運(yùn)動(dòng)分析方法,可以實(shí)現(xiàn)對(duì)海上及陸上目標(biāo)的高精度跟蹤定位,從而避免了上述各種方法的不足.
1 光電吊艙測(cè)角模型
空中機(jī)動(dòng)平臺(tái)中光電吊艙的角度測(cè)量值包括2個(gè):(1)光軸指向(吊艙質(zhì)心與目標(biāo)連線)與基準(zhǔn)縱軸(正北方向)的夾角,稱為方位角β;(2)光軸指向與基準(zhǔn)面(水平面)的夾角,即為俯仰角ε,見圖1.
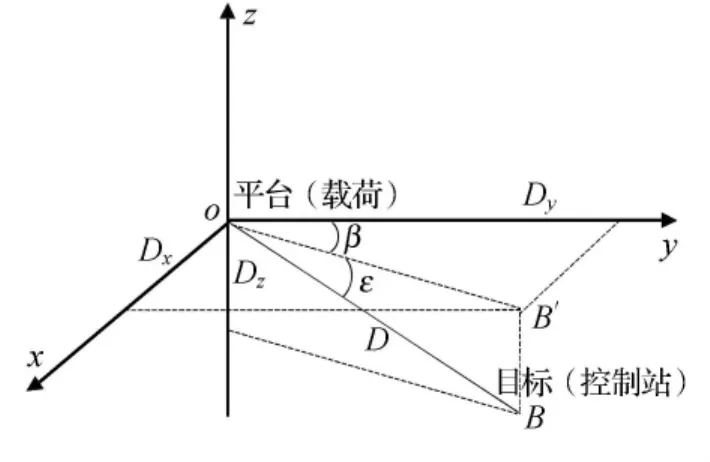
圖1 光電吊艙的測(cè)角原理
2 三角幾何定位模型及誤差分析
這種方法基于空間幾何原理,利用三角形角邊關(guān)系確定目標(biāo)位置及運(yùn)動(dòng)參數(shù).這也是目前工程領(lǐng)域內(nèi)存在的一種簡(jiǎn)單實(shí)用的定位方法.
根據(jù)俯仰角ε的定義,有
從而可以求得目標(biāo)的速度分量

所以,該目標(biāo)的速度、航向參數(shù)為

由于依賴于高度Zh,只有Zh已知,Dj才有解,所以此類方法只能針對(duì)海上目標(biāo)進(jìn)行定位;而對(duì)高度未知的岸上目標(biāo),該算法將無(wú)法工作.
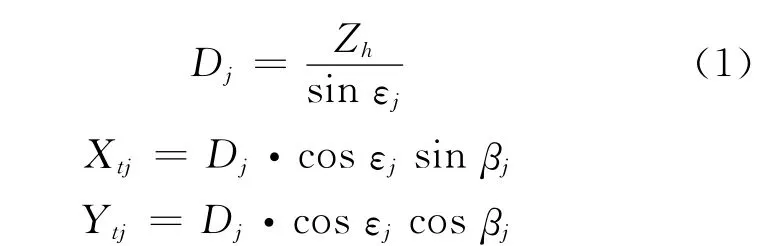
設(shè)空中平臺(tái)導(dǎo)航設(shè)備的高度測(cè)量誤差為δZh,光電吊艙的角度測(cè)量誤差為δε,對(duì)式(1)求微分,得

考慮到高度誤差與角度誤差互相獨(dú)立,斜距離的定位誤差均方差為
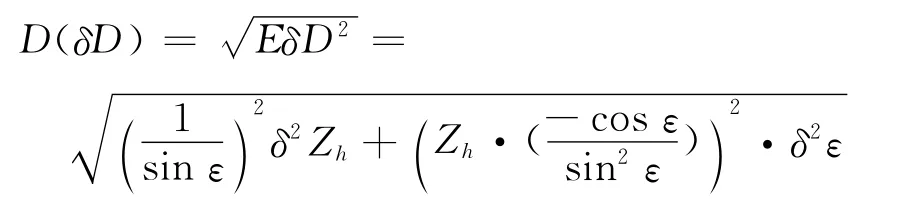
在空中平臺(tái)高度一定(Zh=4 000m),導(dǎo)航誤差、角度測(cè)量誤差一定(δZh=1.5,δε=0.5)的條件下,斜距離的定位誤差均方差δD隨斜距離D的變化曲線見圖2.
圖2 目標(biāo)斜距離定位誤差均方差曲線
隨斜距離增大,斜距離的定位誤差均方差隨之增大.因此,這種方法無(wú)法對(duì)觀測(cè)噪聲的干擾進(jìn)行平滑濾波,從而也就無(wú)法達(dá)到較高的定位精度.
只有消除隨機(jī)噪聲對(duì)定位參數(shù)的干擾,才能提高系統(tǒng)定位精度,采用基于隨機(jī)參數(shù)平滑的目標(biāo)定位模型是最佳選擇.基于此,本文提出了一種基于最小二乘的目標(biāo)定位方法.
3 基于最小二乘的目標(biāo)定位方法
設(shè)空中平臺(tái)航向Kw、航速Vw,在初始時(shí)刻t1,目標(biāo)相對(duì)空中平臺(tái)的初始斜距為D1,俯仰角ε1、方位角β1;在時(shí)刻tj,目標(biāo)相對(duì)空中平臺(tái)的斜距離為Dj,俯仰角εj、方位角βj.設(shè)目標(biāo)作勻速直航,未知航向?yàn)镵m,未知航速為Vm.目標(biāo)運(yùn)動(dòng)的幾何態(tài)勢(shì)見圖3.
圖3 目標(biāo)運(yùn)動(dòng)幾何態(tài)勢(shì)圖
根據(jù)相對(duì)運(yùn)動(dòng)的空間幾何封閉性原理,由圖3中4邊形O′A′C′B′,得
式中:φm為目標(biāo)俯沖角;φw為空中平臺(tái)俯沖角.

由于測(cè)量誤差的存在,式(3)一般不嚴(yán)格滿足,此時(shí),可得
經(jīng)過(guò)k次觀測(cè),基于最小二乘估計(jì)原理[10],定義如下極小化目標(biāo)函數(shù)
為求得參數(shù)Vmx,Vmy,Vmz和D1,分別對(duì)其求偏導(dǎo),并使?J/?Vmx=0,?J/?Vmy=0,?J/?Vmz=0,?J/?D1=0.經(jīng)過(guò)整理,最終可以得到目標(biāo)的運(yùn)動(dòng)參數(shù)
4 仿真分析及試驗(yàn)驗(yàn)證
4.1 仿真分析
以空中機(jī)動(dòng)平臺(tái)的初始位置為坐標(biāo)系原點(diǎn),空中平臺(tái)以航速30m/s、航向30°機(jī)動(dòng);目標(biāo)在坐標(biāo)系中的初始坐標(biāo)位置為(5 000,5 000,-3 500),并以航速10m/s、航向60°運(yùn)動(dòng).同時(shí),假定光電吊艙對(duì)目標(biāo)的角度測(cè)量精度為0.5°,空中平臺(tái)自身位置的測(cè)量精度為1.5m,以1s的時(shí)間間隔、生成300s的仿真數(shù)據(jù).
分別利用傳統(tǒng)的三角幾何定位法和本文提出的最小二乘方法,對(duì)目標(biāo)進(jìn)行定位.經(jīng)100次蒙特卡羅仿真后的結(jié)果,見圖4~5.
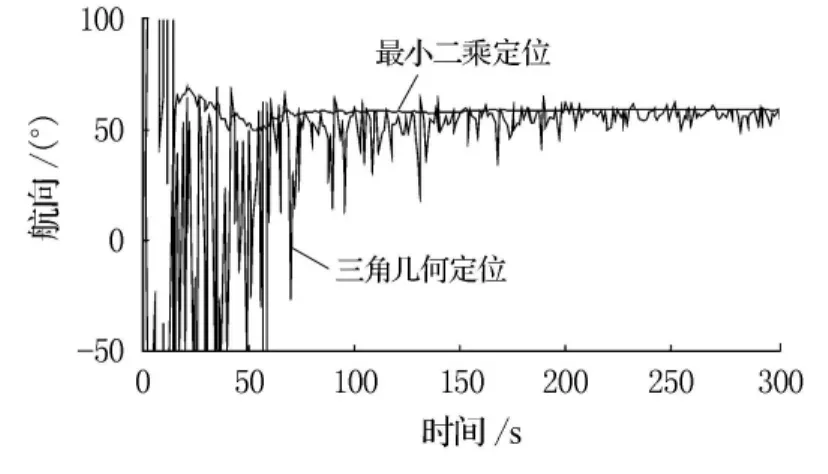
圖4 目標(biāo)航向收斂過(guò)程
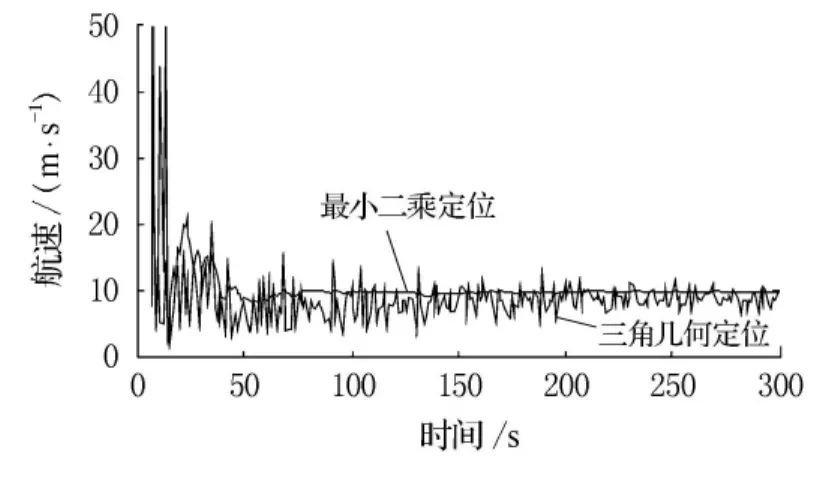
圖5 目標(biāo)航速收斂過(guò)程
由圖中可以看出,三角幾何法定位結(jié)果雖然也能趨近于真實(shí)值,但波動(dòng)大、精度不高;相比之下,本文提出的基于最小二乘的方法則收斂速度快、結(jié)果穩(wěn)定、而且定位精度高.估計(jì)航速相對(duì)真實(shí)航速的相對(duì)誤差小于4%,航向誤差均方差為0.59°,可滿足實(shí)際應(yīng)用要求.
4.2 試驗(yàn)驗(yàn)證
為進(jìn)一步說(shuō)明算法的有效性,選用某次試驗(yàn)數(shù)據(jù)加以分析.當(dāng)時(shí)試驗(yàn)情景為:以空中機(jī)動(dòng)平臺(tái)的地面靜止控制站作為光電吊艙的跟蹤目標(biāo);機(jī)動(dòng)平臺(tái)以變速率繞目標(biāo)做圓弧機(jī)動(dòng).根據(jù)本文提出的算法,得到目標(biāo)經(jīng)度的收斂過(guò)程,見圖6,并得到圖7所示的空中平臺(tái)與目標(biāo)間的距離與真實(shí)距離的比較曲線.
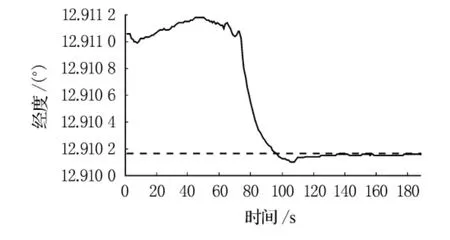
圖6 目標(biāo)經(jīng)度
由對(duì)試驗(yàn)數(shù)據(jù)的分析也可看出,本文提出的算法收斂速度快,100s左右可穩(wěn)定到真值附近;定位精度高,位置誤差(經(jīng)度、緯度)不超過(guò)0.001°,距離誤差則可達(dá)到10m級(jí),因此能夠滿足快速、高精度指示目標(biāo)的實(shí)際需求,從而也為無(wú)源定位領(lǐng)域提供了一種新的可實(shí)現(xiàn)工程應(yīng)用的方法.
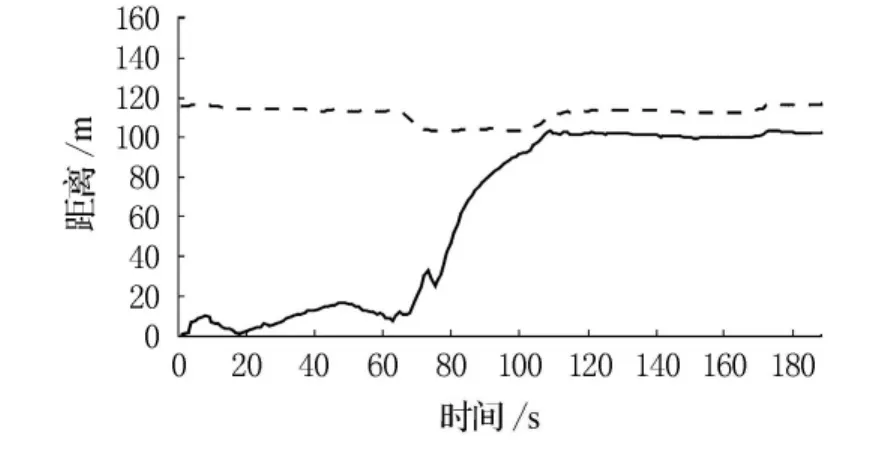
圖7 空中平臺(tái)與目標(biāo)間的距離
5 結(jié)束語(yǔ)
無(wú)源定位是探測(cè)、跟蹤目標(biāo)的重要方式,而光電吊艙又成為無(wú)源定位的一種關(guān)鍵手段.利用空中機(jī)動(dòng)平臺(tái)搭載光電吊艙實(shí)現(xiàn)對(duì)目標(biāo)定位已開始得到應(yīng)用.結(jié)合本文所述的應(yīng)用背景,在分析傳統(tǒng)定位方法特點(diǎn)的基礎(chǔ)上,本文提出了基于最小二乘的目標(biāo)定位方法.仿真數(shù)據(jù)和試驗(yàn)數(shù)據(jù)都表明,新方法能夠有效抑制測(cè)量噪聲帶來(lái)的累積誤差,收斂速度快、定位精度高,能夠滿足實(shí)際工程應(yīng)用需求.
[1]鄒勇華,陳福勝.機(jī)載紅外警戒吊艙及其研制思路[J].艦船科學(xué)技術(shù),2001,6(1):41-44.
[2]胡來(lái)招.一種快速機(jī)載無(wú)源定位方法的分析[J].電子對(duì)抗技術(shù),2001,16(1):1-4.
[3]何 友,修建娟.空中超視距目標(biāo)三維無(wú)源定位算法研究[J].雷達(dá)科學(xué)與技術(shù),2003,6(1):18-21.
[4]陳 玲,李少洪.無(wú)源測(cè)向測(cè)時(shí)差定位算法研究[J].電子信息學(xué)報(bào),2003,25(6):771-776.
[5]吳世文.機(jī)載無(wú)源定位系統(tǒng)的定位精度[J].電子對(duì)抗技術(shù),1995(1):27-30.
[6]JULIER S,UHLMANN J K.A new method for the nonlinear transformation of means and covariances in filters and estimators[J].IEEE Trans A C,2000,45(3):477-482.
[7]ZHANG H M,DENG Z L.A UKF based attitude determination method for gyroless satellite[J].Journal of Systems Engineering and Electronics,2004,15(2):105-109.
[8]DAN S,TIEN Lichia.Kalman filtering with state equality constraints[J].IEEE Tran.Aerospace and Electronic Systems,2002,38(2):132-135.
[9]李 碩,曾 濤.基于推廣Kalman濾波的機(jī)載無(wú)源定位改進(jìn)算法[J].北京理工大學(xué)學(xué)報(bào),2002,22(4):521-524.
[10]張賢達(dá).矩陣分析與應(yīng)用[M].北京:清華大學(xué)出版社,2004.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
