基于NI-LabVIEW環(huán)境的VCM特性參數(shù)測控系統(tǒng)
2013-08-20 04:58:46馬建設(shè)董朝喜劉向明
電子設(shè)計工程 2013年21期
袁 云,馬建設(shè),董朝喜,劉向明
(1.武漢工程大學(xué) 湖北 武漢 430073,2.清華大學(xué) 深圳研究生院,廣東 深圳 518055)
音圈電機(Voice Coil Motor,VCM)屬于特種直線電機,其結(jié)構(gòu)簡單、體積小、響應(yīng)快、精度高、可靠性高等特點,使其廣泛應(yīng)用于硬盤驅(qū)動器、光盤驅(qū)動器、透鏡聚焦和航天儀器等精密定位系統(tǒng)[1]。VCM的啟動電流、最大行程和靈敏度作為其重要性能指標,對實際應(yīng)用起著決定性作用。對其指標檢測的關(guān)鍵技術(shù)是微位移測量。
由于對VCM測量精度和測量速度要求的提高,文中根據(jù)激光三角原理,采用德國米依公司的ILDl401-5激光位移傳感器獲取VCM位移信號。STC12C5A60S2單片機作為控制和數(shù)據(jù)預(yù)處理單元,實現(xiàn)VCM的恒流驅(qū)動控制以及數(shù)據(jù)的預(yù)處理。對數(shù)據(jù)后續(xù)處理及其結(jié)果顯示采用NI-LabVIEW虛擬平臺,開發(fā)設(shè)計VCM關(guān)鍵參數(shù)測試系統(tǒng)。
1 測試系統(tǒng)硬件實現(xiàn)
VCM特性測試系統(tǒng)硬件框圖如圖1所示,由VCM、激光位移傳感器、單片機控制系統(tǒng)、計算機系統(tǒng)4部分組成。

圖1 VCM測控系統(tǒng)硬件框圖Fig.1 Block diagram of control system hardware
系統(tǒng)采用上、下位機通信方案完成人機交互與控制算法、數(shù)據(jù)處理以及圖形輸出顯示。系統(tǒng)開始工作時由操作者按下開始鍵后上位機發(fā)送一個開始信號給下位機,下位機接收到該信號后輸出0~100 mA電流給VCM,每給一次電流,單片機采集傳感器串口傳輸?shù)奈灰茢?shù)據(jù)信號,經(jīng)過濾波算法后將電流值與相應(yīng)的位移值打包并通過串口發(fā)送到上位機,上位機接收到數(shù)據(jù)后將數(shù)據(jù)解包、處理、顯示。
1.1 位移傳感器
選用德國MICRO—EPSILON公司的ILDl401-5型高精度三角反射式激光位移傳感器來測量微位移。該傳感器采用激光三角原理,激光發(fā)射器發(fā)出激光投射到被測表面上,傳感器利用反射回來的激光在位置傳感元件上成像,內(nèi)部集成的控制器通過位移傳感器上所成像的位置依據(jù)激光三角原理計算出相應(yīng)的位移值,并把該位移值以模擬信號(電流)和數(shù)字信號(RS232)以38 400波特率從相應(yīng)引腳輸出。其主要的特性有:測量范圍:5 mm(22.5±2.5);靜態(tài)分辨率為:0.6 μm;動態(tài)分辨率為(1 kHz):3 μm;采樣率為:1 kHz;發(fā)射的激光波長為670 nm;11~30 V直流供電;輸出為4~20 mA模擬電流和RS232數(shù)字信號,內(nèi)部集成處理器采集、處理以及發(fā)送數(shù)據(jù)。
1.2 單片機控制系統(tǒng)
單片機控制系統(tǒng)主要包括VCM恒流驅(qū)動設(shè)計,最小單片機系統(tǒng)設(shè)計,串口通信電路設(shè)計,電源電路設(shè)計四大部分。
1.2.1 VCM驅(qū)動設(shè)計
VCM驅(qū)動[4]選用AD公司的AD5821VCM專用驅(qū)動芯片,AD5821是十位數(shù)模轉(zhuǎn)換器,最高吸入電流可達120 mA,供電電壓為2.7~5.5 V,DAC是通過I2C協(xié)議兩線控制,最高轉(zhuǎn)換速率可達400 kHz。AD5821主要應(yīng)用于手機拍攝相機、數(shù)碼相機和便攜式攝像機中的自動對焦、圖像穩(wěn)定及光學(xué)變焦等[5]。該芯片有九個引腳,VDD為電源引腳接3.3 V電源,SDA,SCL分別為I2C通信的數(shù)據(jù)引腳和時鐘引腳,設(shè)計時必須接個上拉電阻將此兩個引腳上拉到1.8 V;Isink為D/A轉(zhuǎn)換的電流輸出引腳;XSHUTDOWN為系統(tǒng)掉電信號,低電平有效,一旦此信號為低則系統(tǒng)進入休眠狀態(tài),要回到工作狀態(tài)需給該引腳一個高電平;AGND和DGND分別為模擬地和數(shù)字地,在電路板布線時盡量在接近芯片的地方把模擬地和數(shù)字地單點連接[6]。
1.2.2 單片機最小系統(tǒng)設(shè)計
單片機選用STC12C5A60S2,該系列單片機是STC生產(chǎn)的單周期/機器周期(1T)的單片機,代碼完全兼容 8051,但速度快8-12倍。它擁有兩個全雙工串行通信接口,可通過串口實現(xiàn)傳感器和單片機,單片機和計算機的通信。單片機最小系統(tǒng)包括晶振電路,單片機,復(fù)位電路,供電4部分。其重點是晶振的選擇,因為傳感器發(fā)送數(shù)字信號的波特率為38 400,為了使串口傳輸誤差為零,減少數(shù)據(jù)傳送過程中出錯,選用14.7456 MHz晶振,實現(xiàn)串口的零誤差數(shù)據(jù)傳輸。
1.2.3 串口通信電路設(shè)計
通訊模塊包括:單片機和上位機的通信,單片機和傳感器的通信,兩者都是通過串口通信。其電平轉(zhuǎn)換芯片采用MAX2323芯片。該芯片是由德州儀器公司(TI)推出的一款兼容RS232標準的芯片。該器件包含2個發(fā)送器、2個接收器,可以實現(xiàn)兩組信號的相互通信。
1.2.4 電源電路的設(shè)計
整個電路板供電包括,單片機供電3.3 V,AD5821 3.3 V供電和I2C數(shù)據(jù)線和時鐘線上1.8 V的上拉電壓,傳感器24 V供電。系統(tǒng)供電選用開關(guān)電源AC220V輸入,DC5V和24 V輸出,3.3 V供電由LT1529-3.3和 AMS117-3.3穩(wěn)壓得到。1.8 V電壓由AMS117-1.8芯片將3.3 V電壓穩(wěn)壓成1.8 V。
單片機最小系統(tǒng)及VCM驅(qū)動設(shè)計如圖2所示。
2 測試系統(tǒng)的軟件實現(xiàn)
測試系統(tǒng)軟件包括上位機軟件和下位機軟件兩大部分,下位機軟件主要實現(xiàn)VCM的驅(qū)動、數(shù)據(jù)的采集、數(shù)據(jù)初步處理打包以及將數(shù)據(jù)傳送到上位機;上位機軟件主要實現(xiàn)數(shù)據(jù)的后處理、特性曲線的繪制、特性參數(shù)的計算以及數(shù)據(jù)的存儲。軟件總的構(gòu)成如圖3所示。
2.1 下位機軟件
下位機軟件主要包括VCM控制模塊、數(shù)據(jù)采集以及通訊模塊、數(shù)據(jù)初步處理模塊。
2.1.1 VCM控制模塊
VCM的恒流控制是通過AD5821芯片實現(xiàn),其實質(zhì)就是一個10位數(shù)模轉(zhuǎn)換芯片,數(shù)字量0-1023對應(yīng)的輸出電流為0~120 mA。將數(shù)字量轉(zhuǎn)換為相對應(yīng)模擬電流輸出來控制VCM。數(shù)字量寫入AD5821是通過標準的I2C接口協(xié)議。由寫數(shù)據(jù)時序圖可以知道,單片機寫數(shù)據(jù)到AD5821步驟如下:單片機首先發(fā)起始信號,再寫入七位器件地址和一位讀寫控制位,AD5821給一個應(yīng)答信號,寫入給定電流的高八位,AD5821給一個應(yīng)答信號,寫入給定電流的低八位,AD5821給一個應(yīng)答信號,最后由單片機給一個終止信號。
2.1.2 數(shù)據(jù)采集及通訊模塊
數(shù)據(jù)采集就是在給定VCM電流后,利用串口從傳感器中讀取相應(yīng)電流的位移值。傳感器以波特率38 400發(fā)送實時位移數(shù)據(jù),單片機通過串口以38 400波特率接收。通訊就是下位機將處理后的位移值和電流值以約定格式的數(shù)據(jù)包傳遞給上位機。格式為HXXXXXXXT,每個數(shù)據(jù)包以H開頭,緊接著七個數(shù)據(jù)位(三位電流位和四位位移位),以T結(jié)束。方便上位機判斷接收的數(shù)據(jù)包是否是正常。
2.1.3 數(shù)據(jù)初步處理模塊
數(shù)據(jù)初步處理模塊包括將從傳感器中讀到的高八位和低八位合并成十六位數(shù)據(jù),并將數(shù)據(jù)轉(zhuǎn)化成對應(yīng)的位移值,并經(jīng)過一定的數(shù)字濾波算法(中值均值濾波),最后將電流和位移按照數(shù)據(jù)通信模塊中的格式打包。傳感器發(fā)出的數(shù)字信號由高八位和低八位兩個字節(jié)組成,其中高字節(jié)最高位為1,緊接著是數(shù)據(jù)的高七位;低八位的最高位是0,緊接著是數(shù)據(jù)的低七位。判斷接收到高低八位之后,去掉高低字節(jié)的標志位并將數(shù)據(jù)合并成十四位數(shù)據(jù)。再將所得數(shù)據(jù)按中值均值濾波算法處理。即連續(xù)采集十次位移數(shù)據(jù)后按從大到小將數(shù)據(jù)排列,去掉最大值和最小值,求取中間八個數(shù)據(jù)的平均值作為有效值。這樣可以抗尖峰干擾,得到相對穩(wěn)定的數(shù)據(jù),使曲線平滑。再將所得到的數(shù)據(jù)和給定的電流值打包成規(guī)定的數(shù)據(jù)格式通過串口傳遞給上位機。
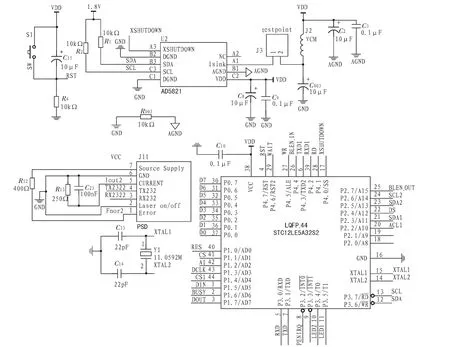
圖2 最小系統(tǒng)及VCM驅(qū)動原理圖Fig.2 The minimum system and VCM driver schematic diagram

圖3 系統(tǒng)軟件框架Fig.3 System software framework
2.2 上位機軟件
上位機軟件采用LabVIEW圖形化的程序語言作為軟件開發(fā)平臺進行系統(tǒng)的應(yīng)用設(shè)計,尤其使用其進行原理研究、設(shè)計實現(xiàn)測試儀器系統(tǒng)時,可大大提高開發(fā)效率。
2.2.1 數(shù)據(jù)通信模塊
串口是常用的計算機與外部串行設(shè)備之間的數(shù)據(jù)傳輸通道,通過RS232串口總線與PC計算機組成虛擬儀器系統(tǒng),是目前虛擬儀器的重要構(gòu)成方式之一,主要用于速度較低的測試系統(tǒng),具有接口簡單、使用方便的特點[3]。LabVIEW提供了強大的串行通信VISA庫,其主要的VI函數(shù)介紹如下:VISA配置串口:初始化VISA resource name指定的串口通信參數(shù)(波特率,數(shù)據(jù)位,奇偶位,起始位,停止位等);VISA寫入:將緩沖區(qū)中的數(shù)據(jù)發(fā)送到指定的串口;VISA讀取:將VISA指定的串口接收緩沖區(qū)中的數(shù)據(jù)讀取指定字節(jié)數(shù)的數(shù)據(jù)到計算機內(nèi)存中;VISA Bytes at Serial Port:查詢指定串口接收緩沖區(qū)中的數(shù)據(jù)字節(jié)數(shù);VISA關(guān)閉:結(jié)束指定串口資源之間的會話。設(shè)置好各項通信參數(shù)后,將這些VI彼此按設(shè)計流程連接就可以實現(xiàn)上位機和下位機之間的通信。
2.2.2 數(shù)據(jù)處理及顯示模塊
該模塊包括從串口讀取數(shù)據(jù)的判斷解析,數(shù)據(jù)的處理(各特性參數(shù)的計算),圖形顯示。數(shù)據(jù)判斷保證從串口傳過來的數(shù)據(jù)是下位機傳送的正常數(shù)據(jù),因為下位機發(fā)送數(shù)據(jù)的格式是HXXXXXXXT,上位機接到數(shù)據(jù)后首先利用字符串截取VI提取最高位和最低位并判斷是否是H和T,如果是就認為下位機發(fā)送的數(shù)據(jù)正常,否則認為數(shù)據(jù)接收異常放棄此次數(shù)據(jù)。數(shù)據(jù)解析:將打包的數(shù)據(jù)利用字符串截取函數(shù)提取數(shù)據(jù)位的前三位(驅(qū)動VCM的電流)送入電流數(shù)組,同時截取數(shù)據(jù)位的后四位 (電流值對應(yīng)的位移值)送入位移數(shù)組完成數(shù)據(jù)的解析。數(shù)據(jù)處理主要是根據(jù)電流值和位移值求出VCM的靈敏度、啟動電流和最大行程。靈敏度的求解,將中間線性比較好的數(shù)據(jù)段進行線性插值(利用線性插值子VI)所得直線的斜率即為該VCM的靈敏度,直線與電流軸的焦點即為啟動電流。最大行程利用求位移數(shù)組的最大值來求取(求數(shù)組最大值VI)。
2.2.3 數(shù)據(jù)存儲模塊
數(shù)據(jù)存儲模塊要求上位機把每次測試的結(jié)果做成報表的形式存儲。LabVIEW Report Generation工具包通過ActiveX技術(shù)將Microsoft Excel與LabVIEW集成開發(fā)環(huán)境結(jié)合起來,用于快速生成專業(yè)的報告,從而有效的表示出各種測試數(shù)據(jù)和結(jié)果。用戶可以移植、修改現(xiàn)有的報告模板,并使用標準的LabVIEW功能,擴展該工具包的報告生成功能。使用該VI時,首先必須在Excel中做好模版文件(.xlt文件),將該VI放入程序框圖時將出現(xiàn)配置對話框,將生成的模板文件導(dǎo)入,再設(shè)置其參數(shù)。將要保存的數(shù)據(jù)按名稱連線到相應(yīng)的端子,各數(shù)據(jù)就會保存到模板定義的Excel單元格里面。
3 實驗結(jié)果
將電源連接到控制板,利用串口線將傳感器和控制板連接,控制板和計算機連接,實驗硬件裝置如圖4所示。

圖4 實驗硬件裝置Fig.4 The experimental hardware device
實驗所用VCM為實驗室自制VCM,由控制器控制AD5821芯片依次輸出0-100mA(每次增加1mA)電流驅(qū)動VCM,由傳感器采集各個電流值對應(yīng)的位移值,由下位機發(fā)送數(shù)據(jù)到上位機經(jīng)過數(shù)據(jù)處理后在LabVIEW前面板中繪制的VCM位移-電流曲線如圖5所示。隨著電流的增加VCM按照相應(yīng)規(guī)律運動,因為要克服本身的重力以及其他預(yù)壓力作用,VCM需要達到一定的電流(啟動電流)才開始運動,由測試曲線可知,啟動電流在20 mA左右,隨后VCM以6 μm/mA(靈敏度)的步距運動,當(dāng)電流達到85 mA左右行程達到最大值 (最大行程)。由于馬達性能的不同以上參數(shù)會有不同,其應(yīng)用領(lǐng)域也有所不同。

圖5 實際測得的VCM特性曲線Fig.5 The actual curves of VCM
測試系統(tǒng)軟件給出的特性參數(shù)值以及和參考值之間的對比如表1所示。
對比實測結(jié)果和給定的參考值可知靈敏度誤差比較小,與給定參考值一致。而啟動電流和最大行程與參考值有偏差,分析其原因如下:給出的參考值是在有反射片的情況下測量的結(jié)果,而本測試系統(tǒng)無需反射片,這也是本系統(tǒng)的一大創(chuàng)新點,入射激光直接投射到VCM的上彈片上,由與缺少反射片重力預(yù)壓力的作用導(dǎo)致啟動電流偏小,最大行程稍微偏大的結(jié)果。

表1 實際值與參考值對比Tab.1 The actual value and the reference value of the comparison between
4 結(jié)束語
和市場上現(xiàn)有的VCM特性參數(shù)測試系統(tǒng)相比,本系統(tǒng)成本低,檢測時無需反射片(反射片要求光學(xué)平面,反射率大于80%),以及對被測表面質(zhì)量沒有同類產(chǎn)品嚴格。
文中基于LabVIEW軟件平臺,微位移傳感器,以及單片機構(gòu)建VCM特性參數(shù)測試系統(tǒng),并對VCM特性參數(shù)進行測試,實驗結(jié)果表明:該系統(tǒng)穩(wěn)定可靠、測試精度較高、測試簡單、結(jié)果直觀明了。
[1]興連國,周惠興,侯書林,等.音圈電機研究及應(yīng)用綜述[J].微電機,2011,44(8):82-87.
XING Lian-guo,ZHOU Hui-xing,HOU Shu-lin,et al.Research and application of voice coil motor[J].Micromotors,2011,44(8):82-87.
[2]范小蘭,趙春鋒.基于LabVIEW的位移測量系統(tǒng)設(shè)計[J].制造業(yè)自動化,2012,34(15):112-114.
FAN Xiao-lan,ZHAO Chun-feng.Design of displacement measuring platform based on LabVIEW[J].Manufacturing Automation,2012,34(15):112-114.
[3]程廷海,黃鷂,包鋼,等.基于LabVIEW的超聲電機測試系統(tǒng)[J].傳感器與微系統(tǒng),2011,30(4):114-116.
CHENG Ting-hai,HUANG He,BAO Gang,et al.A measurement system for ultrasonic motor based on LabVlEW[J].Transducer and Mierosystem Technologies,2011,30 (4):114-116.
[4]Oboe R,Marcassa F,Maiocchi G.Voltage driven hard disk drive with voice coil model-based control[J].Microsyst Technol,2005(11):478-487.
[5]Oboe R,Antonello R,Capretta P.Realization of an adaptive voltage driver for voice coil motor[J].Microsyst Technol,2005(11):663-675.
[6]Landolsi T,Dhaouadi R,Aldabbas O.Beam-stabilized optical switch using a voice-coil motor actuator[J].Journal of the Franklin Institute,2011(348):1-11.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45