施工現(xiàn)場火災(zāi)智能化預(yù)防方案研究
2013-08-30 08:54:12徐秀杰任國智談旭杰
山東建筑大學(xué)學(xué)報 2013年4期
徐秀杰,任國智,談旭杰
(1.山東建筑大學(xué)管理工程學(xué)院,山東 濟(jì)南 250101;2.萊州市建筑科學(xué)研究所,山東 萊州 261400;3.濟(jì)南沃爾電子有限公司,山東 濟(jì)南 250108)
0 引言
近年來,我國的建筑施工現(xiàn)場火災(zāi)事故頻頻發(fā)生,給人民生命財產(chǎn)帶來了巨大的損失。目前,仍沒有實現(xiàn)對施工現(xiàn)場火災(zāi)隱患的有效控制。單純的起火判定可以采用煙感或視頻圖像處理的方式[1],但這些方法并不適用于施工現(xiàn)場火災(zāi)預(yù)防,施工過程中的用火并不一定會引發(fā)火災(zāi)。從施工現(xiàn)場火災(zāi)起因來看,電氣、用火不慎是火災(zāi)頻繁發(fā)生的主要直接原因。這就需要在使用電、火、熱源設(shè)備時與施工區(qū)域的可燃物保持一定的安全距離,或需采取相應(yīng)防護(hù)措施,如對可燃物覆蓋耐火隔離罩、焊接時下方使用接火盆等。由于電、火、熱源經(jīng)常需要移動使用,使用者在忙碌中可能會疏忽與可燃物的距離。因此,自動感知獲取移動火源設(shè)備的當(dāng)前位置,借助虛擬現(xiàn)實技術(shù)智能判定與可燃物的安全距離,排除了人工判定的不可靠性,對施工火災(zāi)預(yù)防具有一定的應(yīng)用價值。
定位感知無線目標(biāo)節(jié)點的位置是物聯(lián)網(wǎng)智能環(huán)境的一個重要組成部分。利用無線信號定位在通信和導(dǎo)航領(lǐng)域受到了廣泛的關(guān)注。文獻(xiàn)[2]中通過雙頻GPS(Global Positioning System)接收機(jī)對水庫大壩的各個監(jiān)測點進(jìn)行監(jiān)測,獲得水平及垂直位移量可以達(dá)到毫米級的精度,從而可對大壩的較大變形進(jìn)行預(yù)警。但GPS定位僅適用于無遮擋的環(huán)境,且用戶節(jié)點通常功耗大,成本高,不適用于低成本自組織的無線網(wǎng)絡(luò)。
射頻識別RFID(Radio Frequency Identification)技術(shù)在無線通信領(lǐng)域中已經(jīng)成為一個有用的通用技術(shù),獲得了相當(dāng)?shù)年P(guān)注。RFID系統(tǒng)可用于目標(biāo)對象感知定位,它通常是通過部署若干RFID標(biāo)簽和/或讀者在固定位置,根據(jù)測得的各固定節(jié)點與目標(biāo)對象間的距離計算其位置[3]。
虛擬現(xiàn)實技術(shù)目前都已經(jīng)相當(dāng)成熟,但主要應(yīng)用于娛樂、效果展示及培訓(xùn)等。也有部分文獻(xiàn)將虛擬現(xiàn)實應(yīng)用于解決實際問題,文獻(xiàn)[4]提出了三維激光掃描技術(shù)在古建保護(hù)中深層次的應(yīng)用,將掃描結(jié)果用于逆向重建、模擬修復(fù);文獻(xiàn)[5]通過開發(fā)的行人過街行為虛擬實驗系統(tǒng)對大連路與飛虹路交叉口的實驗分析,判定出等待時間過長是誘發(fā)行人違章的重要因素,因而需要縮短信號周期和行人等待時間,減少行人違章過街的概率。然而將RFID定位技術(shù)和三維虛擬現(xiàn)實技術(shù)相結(jié)合用于解決實際移動節(jié)點與大體積物體之間的距離問題在現(xiàn)有文獻(xiàn)中尚不多見。
1 火災(zāi)預(yù)防總體架構(gòu)方案
在施工現(xiàn)場,可移動火源設(shè)備相對較小,其位置可以用三維坐標(biāo)點表示,采用RFID的定位算法是計算定位目標(biāo)節(jié)點的三維坐標(biāo)是可行的。而可燃物通常體積較大,如施工中的保溫層、堆積的木料等,占據(jù)較大空間,僅以一個坐標(biāo)點不足以標(biāo)識其位置。為了實現(xiàn)使用中的火源設(shè)備與可燃物之間保持安全距離的自動判定,提出了RFID移動目標(biāo)定位與虛擬現(xiàn)實場景實現(xiàn)碰撞檢測相結(jié)合的方法。在服務(wù)器上對現(xiàn)場的可燃物進(jìn)行快速的三維建模,同時也要實現(xiàn)對各類火源設(shè)備的建模,火源設(shè)備的建模要包括其最大熱輻射區(qū)域。所有模型導(dǎo)入虛擬場景,通過RFID技術(shù)實時定位移動火源設(shè)備位置坐標(biāo)并更新虛擬場景中模型的位置,通過碰撞檢測保證火源設(shè)備移動使用時一旦與可燃物突破安全距離,立即產(chǎn)生警報信息通知相關(guān)人員采取措施預(yù)防火災(zāi)發(fā)生。
火災(zāi)預(yù)防總體架構(gòu)方案由施工現(xiàn)場的多個RF節(jié)點及上位機(jī)服務(wù)器組成(如圖1所示)。圖中目標(biāo)節(jié)點即為可移動的火源設(shè)備,參考節(jié)點用于輔助目標(biāo)節(jié)點定位,服務(wù)器中間件用于實現(xiàn)計算機(jī)與現(xiàn)場通信接口及數(shù)據(jù)處理,虛擬場景為施工現(xiàn)場在計算機(jī)中的虛擬再現(xiàn)。
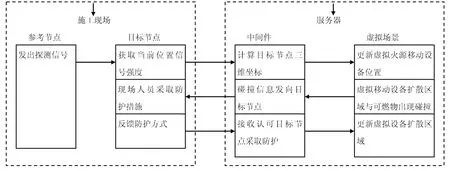
圖1 火災(zāi)預(yù)防系統(tǒng)總體架構(gòu)
2 移動火源設(shè)備定位實現(xiàn)方法
RFID是一種基于電磁信號檢測和無線傳感器技術(shù),一個典型的RFID系統(tǒng)包括兩個基本的組件類型:讀卡器Reader和標(biāo)簽Tag,Reader能夠按照要求讀取Tag的信息,讀取距離取決于輸出功率和射頻強(qiáng)度。目標(biāo)定位是RFID系統(tǒng)的最重要的應(yīng)用之一[3]。
2.1 基本二維定位方法
定位技術(shù)一般利用接收無線信號的各個指標(biāo)進(jìn)行定位,最傳統(tǒng)的度量方式是基于測量多個參考點接收信號的到達(dá)角度(AOA)、到達(dá)時間(TOA)、到達(dá)時間差(TDOA)或接收信號強(qiáng)度(RSS),應(yīng)用最為廣泛且易于實現(xiàn)的是基于 RSS。有名的LANDMARC系統(tǒng)是一種基于有源RFID技術(shù)的二維動態(tài)定位識別系統(tǒng),基于最近鄰居定位思想,在地表部署若干位置固定的參考Tag作為輔助定位基準(zhǔn),使用的Reader可以提供多個等級的信號強(qiáng)度,通過比較Reader測得目標(biāo)Tag與鄰近參考Tag的場強(qiáng)值匹配程度來對目標(biāo)Tag進(jìn)行定位[2]。
因為實際測量環(huán)境的復(fù)雜性,不同時刻不同條件測量出的同一位置RSS總會有差異,換算出的錨節(jié)點到目標(biāo)節(jié)點的距離也必然不夠精確,尚需要采取一些措施進(jìn)行修正。在二維平面中的定位精度問題已被廣泛研究,如三角剖分中的近似點測試法(APIT)、基于RSSI的三角形質(zhì)心定位算法、最小二乘優(yōu)化的對象位置估計算法等[6-7]。這些算法在二位平面中已經(jīng)可以得到相當(dāng)高的定位精度。
2.2 三維定位實現(xiàn)
由于施工過程并不僅限于地表,必須要實現(xiàn)三維空間的定位。目前,在三維空間中的相對定位也開始受到廣泛關(guān)注。文獻(xiàn)[8]首先通過建立在部署區(qū)域基于有源標(biāo)簽Tag的稀疏三維標(biāo)簽陣列及兩個帶有兩個天線的讀卡器Reader,然后由各Reader收集初始化系統(tǒng)后的射頻信號強(qiáng)度及其ID號,進(jìn)一步由線性插值算法得到虛擬的稠密陣列射頻信號的強(qiáng)度分布及其對應(yīng)的各Tag的ID號和坐標(biāo)信息存入與Reader相連服務(wù)器的數(shù)據(jù)庫。附著有源標(biāo)簽的移動火源對象在三維區(qū)域的坐標(biāo)軌跡可以通過每一時刻的信號強(qiáng)度去檢索數(shù)據(jù)庫,得到目標(biāo)對象可能所在網(wǎng)格的坐標(biāo),然后多個Reader的結(jié)果進(jìn)行統(tǒng)一得到唯一網(wǎng)格,最后使用一個簡單而有效幾何平均計算得到目標(biāo)對象位置坐標(biāo)。文獻(xiàn)[9]類似地部署若干Tag,但依據(jù)Reader部署的不同方式及目標(biāo)對象附著tag或Reader又提出了三種不同方案。文獻(xiàn)[10]基于RSSI的計算距離進(jìn)一步定位基礎(chǔ)上提出了用梯度下降法提高定位精度。RF傳輸距離主要受到發(fā)送功率和信號頻率的影響,考慮到施工現(xiàn)場的工作區(qū)域的變動性,需要選用有源Tag和較高的帶寬實現(xiàn)遠(yuǎn)距離信息傳輸。
RF節(jié)點通常具有受限的感知、通信和計算能力,為加強(qiáng)實時性,從信號強(qiáng)度到距離再到坐標(biāo)的計算可以遷移到服務(wù)器上完成。同一時間可能會有多個火源設(shè)備處于移動使用狀態(tài),也就是有多個移動目標(biāo)節(jié)點,為避免同時發(fā)生信號的碰撞,可以采用劃分時間片的方式輪流發(fā)送。在允許的時間周期上,服務(wù)器中間件讀取測距信息,輪流計算每個目標(biāo)對象的定位坐標(biāo),這樣就可以確定每個目標(biāo)對象的粗糙移動軌跡或是否還存在與施工現(xiàn)場。
3 移動火源設(shè)備與虛擬場景的交互
3.1 三維模型構(gòu)建
根據(jù)條件及需求,三維模型構(gòu)建可以采用不同的方法。基于Strata Foto 3D三維重構(gòu)的原理可以實現(xiàn)快速的建模,首先對施工場景中各火源對象及可燃物對象選擇從不同的角度拍攝連續(xù)的平面圖像,并根據(jù)要建模物體的不同,使背景顏色與建模對象顏色對比明顯,便于后期影像合成中的處理。然后將連續(xù)拍攝的圖片導(dǎo)入Strata Foto 3D中進(jìn)行算圖,根據(jù)圖片中建模對象的形狀和顏色,完成建立線框、遮罩等處理,進(jìn)而實現(xiàn)平面影像向立體影像的轉(zhuǎn)換[11-12]。構(gòu)建的三維模型可以用3ds的格式保存,最后可以導(dǎo)入到3dsMax,對模型做進(jìn)一步修正。另外,也可導(dǎo)入到BIM中完成施工場景中各火源對象及可燃物對象的構(gòu)建[13]。對所有實體可拍攝對象完成建模后,還要根據(jù)各類火源的擴(kuò)散范圍建模,將所有移動火源設(shè)備在根據(jù)實際使用時的最大的擴(kuò)散范圍大小建模,針對加防護(hù)或未加防護(hù)措施時擴(kuò)散范圍的完全不同,采用不同的三維模型,默認(rèn)狀態(tài)下使用未加防護(hù)的最大的3D模型,在實際運行過程時根據(jù)是否添加了防護(hù)措施動態(tài)調(diào)用不同模型。若條件不具備,也可以通過測量建立粗糙的簡單模型,只要模型的范圍能包容要建模對象,也可達(dá)到系統(tǒng)的需求。
所有靜態(tài)模型構(gòu)建完畢,還需要實現(xiàn)場景中的漫游移動及實時碰撞檢測,這時可以將所有模型導(dǎo)入到Unity 3D場景。Unity 3D作為一款成熟的游戲引擎,在Windows平臺調(diào)用Direct3D高度優(yōu)化的圖形渲染,能夠利用低端硬件流暢的運行虛擬場景,快捷的實現(xiàn)場景的交互漫游及碰撞檢測。由于在場景中會出現(xiàn)多個不同ID的相同火源設(shè)備,可以對所有三維模型采用Instantiate(實例化)、Prefabs(預(yù)制)方式,只需建立一個Prefabs原型,程序運行時,動態(tài)Instantiate多個Prefabs對象。這樣也方便將來添加相同設(shè)備,只需通過界面交互方式新的實例對象。
3.2 移動火源設(shè)備擴(kuò)散區(qū)與可燃物碰撞檢測
碰撞檢測算法可以從時間和空間的角度進(jìn)行劃分,按照是否考慮時間參數(shù)可以分為連續(xù)碰撞檢測和離散碰撞檢測兩類,按照空間結(jié)構(gòu)的碰撞檢測算法又分為層次包圍盒檢測(如 OBB、Sphere、AABB盒)和空間剖分(如BSP樹)檢測的方法,其中層次包圍盒檢測算法以其高效的特征應(yīng)用更為廣泛[14-15]。當(dāng)前流行的游戲引擎一般都是基于層次包圍盒的碰撞檢測算法,包圍方式分為多種,不管采用哪種包圍體,代碼結(jié)構(gòu)都是類似的。Unity 3D也是采用了層次包圍盒的碰撞檢測方式,具有較好的檢測精度。Unity 3D包括一般的剛體之間碰撞和范圍觸發(fā)碰撞檢測兩類,前者要求碰撞雙方都是剛性的Collider(碰撞體),后者也要求雙方是Collider,同時被撞的一方還要開啟is trigger屬性,另外每一類從時間上都分為三種狀態(tài):開始接觸到其他Collider、持續(xù)接觸其他Collider、停止接觸其他Collider。用于實現(xiàn)碰撞檢測的函數(shù)主要有:OnCollisionEnter()、OnCollisionExit()、OnCollisionStay()和 OnTriggerEnter()、OnTriggerExit()、OnTriggerStay()。
在Unity 3D中,為了實現(xiàn)導(dǎo)入模型的碰撞,應(yīng)首先將所有的三維模型對象添加Collider并設(shè)置為剛體RigidBody。然而,從BIM或3ds Max導(dǎo)入的場景對象模型結(jié)構(gòu)較復(fù)雜,開始并沒有產(chǎn)生Collider包圍盒,手工創(chuàng)建Collider較為復(fù)雜且不精確,可以在Project中選中場景模型,在 Inspector中勾選Generate Colliders,應(yīng)用即可生成模型所需的網(wǎng)格碰撞器(Mesh Collider)
對于某一可燃物模型A,其對應(yīng)碰撞檢測測試?yán)倘缦?
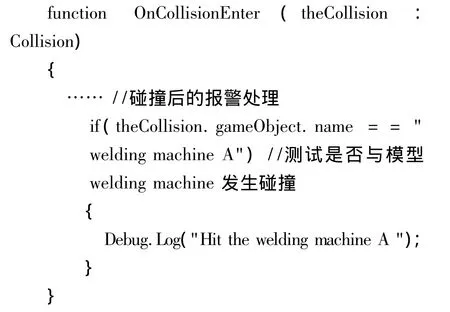
theCollision.gameObject.name 表示當(dāng)前突破了與可燃物模型A的安全距離那個移動火源設(shè)備模型名稱。
只有移動對象才會出現(xiàn)碰撞,虛擬場景中對象的移動是實際火源設(shè)備的實時反饋,通過周期性判定采集一系列RFID的RSSI計算火源所得坐標(biāo)是否發(fā)生變化,若有變化,對應(yīng)只需每次將目標(biāo)對象移動到所求新坐標(biāo)點位置。實現(xiàn)代碼如下:

場景中實際移動的目標(biāo)對象可能有多個,需要在主場景中輪流遍歷所有可移動對象獲取新的坐標(biāo)點。
3.3 碰撞結(jié)果反饋
一旦虛擬場景中檢測到碰撞,可認(rèn)定對應(yīng)移動火源設(shè)備與可燃物之間突破安全距離,服務(wù)器端應(yīng)給出警告信息,并立即發(fā)送警報信息給移動火源設(shè)備附近的Reader,由其通知智能模塊給出閃燈或者語音提示,如“請注意:附近有可燃物”。警報發(fā)出后,若操作員采取了對應(yīng)措施,應(yīng)通知服務(wù)器修改虛擬場景狀態(tài)變?yōu)椴辉倥鲎病H绮僮鲉T在正要使用的焊接機(jī)下方增加了接火盆,對應(yīng)虛擬場景模型要做Scaling(縮放)變換,大模型變?yōu)樾∧P停鲎膊辉俪霈F(xiàn)。若是對當(dāng)前可燃物做了隔離處理,可采用Unity 3D分層碰撞策略,暫時將場景中可燃物模型的移入其他層,撤掉隔離后再恢復(fù)到與火源設(shè)備同一層次。
如果要完全實現(xiàn)上述的智能化判定,必須在施工現(xiàn)場另外增加智能化模塊,使現(xiàn)場操作員能夠輸入哪個ID號設(shè)備針對哪個可燃物做了何種預(yù)防措施,通過無線網(wǎng)絡(luò)傳送信息到服務(wù)器,修改場景中各模型狀態(tài)使得采取預(yù)防措施后自動中止警報。若考慮到系統(tǒng)實現(xiàn)成本,也可不增加硬件,由操作員通知信息員基于頁面交互方式對模型對象狀態(tài)做出修改,這樣信息員將不可遠(yuǎn)距離維護(hù)頁面,隨時需要根據(jù)反饋信息維護(hù)虛擬場景狀態(tài),增加了人力成本。
4 結(jié)語
通過對現(xiàn)有技術(shù)的研究與融合,提出了對施工現(xiàn)場火災(zāi)預(yù)防的RFID技術(shù)與虛擬現(xiàn)實相結(jié)合的智能化解決方案,基于對火源設(shè)備擴(kuò)散范圍進(jìn)行建模的設(shè)想可以實現(xiàn)以碰撞檢測方式對火災(zāi)的預(yù)警,并全面分析了其可行性。這一方案的實施,可以進(jìn)一步擴(kuò)展出更多的應(yīng)用。比如施工現(xiàn)場每個員工佩戴RFID卡,定位員工當(dāng)前位置及是否離開施工現(xiàn)場等,也可以給現(xiàn)場所有非可燃材料及非火源設(shè)備進(jìn)行標(biāo)識,提高管理效率及安全,有效監(jiān)測材料和施工設(shè)備的位置。對于服務(wù)器端,可以構(gòu)建整個施工工程進(jìn)度的虛擬模型,嵌入Web頁面,便于業(yè)主或領(lǐng)導(dǎo)遠(yuǎn)程了解工程施工進(jìn)度。
[1]Rinsurongkawong S.,Ekpanyapong M.,Dailey M.N..Fire detection for early fire alarm based on optical flow video processing[C].Electrical Engineering/Electronics,Computer,Telecommunications and Information Technology (ECTICON),20129th International Conference.2012:1 -4.
[2]楊福秋,張月珍,溫紀(jì)康,等.GPS靜態(tài)定位在大壩變形監(jiān)測中的應(yīng)用[J].山東建筑大學(xué)學(xué)報,2009,24(5):482-487.
[3]Ni L.M.,Liu Yunhao ,Lau Y.C.,et al.Landmarc:indoor location sensing using active RFID[J].Wireless Networks,2004,10(6):701 -710.
[4]丁寧,王倩,陳明九.基于三維激光掃描技術(shù)的古建保護(hù)分析與展望[J].山東建筑大學(xué)學(xué)報,2010,25(3):274-276.
[5]孫劍,楊燕,李克平,等.信號控制交叉口行人過街行為虛擬實驗[J].同濟(jì)大學(xué)學(xué)報,2011,39(5):682-687.
[6]Bulusu N..GPS-less low-cost outdoor localization for very small devices[J].Personal Communications IEEE,2000(7):28 -34.
[7]彭鑫,李仁發(fā),楊柳,等.基于最小二乘優(yōu)化的車輛位置估計算法[J].通信學(xué)報,2010,31(8):10 -15.
[8]Han Jinsong,Zhao Yiyang,Yan Shuncheng,et al.Improving accuracy for 3D RFID localization[J].International Journal of Distributed Sensor Network,2012:1 -9.
[9]Maneesilp,Wang Chong,Wu Hongyi,et al.RFID support for accurate 3-dimensional localization[J].IEEE Transctions on Computers,2012:1 -14.
[10]Chien H.K..RFID 3D location sensing algorithms[J].Automation in Construction,2010,19(5):588 -595.
[11]Kashihara K..Three-dimensional reconstruction of artifacts based on a hybrid genetic algorithm[C].Systems,Man,and Cybernetics(SMC),2012 IEEE International Conference.Oct.2012:900-905.
[12]段金榮,胡玉萌,劉凱,等.魚類標(biāo)本及標(biāo)本館場景三維演示系統(tǒng)的研發(fā)[J].南方水產(chǎn)科學(xué),2013,9(1):63 -67.
[13]Shen Zhigang,Jiang Landu,Kevin G.,et al.Creating 3D webbased game environment using BIM models for virtual on-site visiting of building HVAC systems[C].Construction Research Congress 2012@ASCE ,2012:1212-1221.
[14]馬登武,葉文,李瑛.基于包圍盒的碰撞檢測算法綜述[J].系統(tǒng)仿真學(xué)報,2006,18(4):1058 -1064.
[15]朱元峰,孟軍,謝光華,等.基于復(fù)合層次包圍盒的實時碰撞檢測研究[J].系統(tǒng)仿真學(xué)報,2008,20(2):372-377.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00