基于光電傳感器智能車系統的設計
2013-09-03 07:11:18葉夢君胡長暉張先鶴王小威袁亞軍呂高強
湖北師范大學學報(自然科學版) 2013年1期
葉夢君,胡長暉,張先鶴,王小威,袁亞軍,呂高強
(湖北師范學院 機電與控制工程學院,湖北 黃石 435002)
0 引言
傳感技術與控制技術相結合是構成智能系統的兩大支柱,已經被廣泛的應用于各個領域,具有重要的研究和應用價值。
光電技術智能車系統行駛的路徑為白色KT板,路徑中心有寬度為2.5cm的連續的黑色線條。該黑色線條作為智能車行駛的導航信息源。智能車采用反射式紅外光電傳感器檢測路徑黑線,并沿著黑線快速行駛。光電管照射到黑色線條和白色路面上,將產生不同反射情況,通過這種不同的反射情況,能找到接收管所在的位置,從而檢測智能車相對于路徑中心黑色線條的位置,控制智能車的行駛方向和行駛速度。
1 智能車系統的整體結構
光電技術智能車根據功能可分為七個部分:以MC9S12XS128為主控制器的最小系統模塊、光電傳感器模塊、電源管理模塊、速度檢測模塊、舵機驅動模塊、電機驅動模塊、輔助調試模塊。如圖1所示為智能車系統的整體結構圖。
1.1 主控制器
MC9S12XS128具有128KB的FLASH,12KB的RAM,4KB的EEPROM.片上集成有電壓調節、在線調試、時鐘產生、定時器、A/D轉換、PWM輸出等模塊,滿足智能車對主控制器資源的要求。
1.2 光電傳感器
光電傳感器采用反射式紅外光電傳感器ST188,ST188由一個高發射功率紅外光電二極管和一個高靈敏度光電晶體管組成。紅外發射管的光線照射在白色的底板上,光電晶體管能夠接收到反射紅外光;紅外發射管的光線照射在黑色中心線條上被吸收,光電晶體管不能接收到反射的紅外光。
1.3 電機驅動
電機驅動模塊是由分離元器件IRF4905和IRFZ48N搭建的H橋,主控制器輸出兩路PWM控制信號驅動IR4427芯片,控制H橋以驅動電機正反轉。
1.4 速度檢測
采用光電編碼器YZ30D-(4S)-2NA-200,脈沖數200,具有功耗低,抗沖擊,重量輕的特點。
1.5 電源管理
電源管理模塊將車載輸入主電源(7.2V)經多路并聯的DC-DC轉換后,為主控制器(5V),舵機(6V),光電傳感器(5V),電機驅動(5V)等模塊供電。
2 光電傳感器設計
2.1 光電傳感器電路設計
光電傳感器的接收電路圖如圖2所示, 反射式紅外光電傳感器ST188接收晶體管的輸出信號,經放大器LM324組成的比較電路輸出。ST188的發射管一直處于工作狀態,且工作電流恒定。光電傳感器的工作原理是,當紅外發射管發射紅外線垂直的照射到白色底板上,經反射的紅外光線被接收管接收,光敏三極管將導通,比較器輸出低電平,實際測量值為0V;當紅外發射管發射紅外線垂直的照射到黑色導航線上,紅外光線未被反射,光敏三極管截至,比較器輸出高電平,實際測量值3.4V,因此,光電傳感器的輸出信號不需要經過AD轉換,直接可以通過主控制器的通用I/O口讀取。
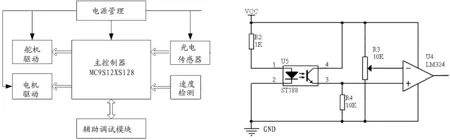
圖1 智能車系統整體結構圖 圖2 光電傳感器接收電路
2.2 光電傳感器布局
光電傳感器布局如圖3所示,分為兩排安裝,黑色圓圈代表光電傳感器的位置,前排13個光電傳感器,從左至右依次標號為-6~6,后排7個傳感器,從左至右依次標號-3~3.前后排距離9cm,前排總長18cm,后排總長9cm,相鄰兩光電傳感器的間距為1.5cm,這樣能夠保證任意時刻,路徑中心黑線都能被光電傳感器檢測到,而不會因為傳感器的間距過大,漏掉黑線。整個傳感器模塊安裝在車身前端,與路徑水平面的距離為5cm.
3 信號采集與處理
光電傳感器采集的賽道信息,輸出信號為高電平或低電平,通過主控制器MC9S12XS128的通用I/O口直接讀取該信號,獲取光電傳感器的信號后,需要搜索是哪個傳感器檢測到了黑線。本智能車系統采用重心法搜索檢測到黑線的光電傳感器,重心法計算公式如下:
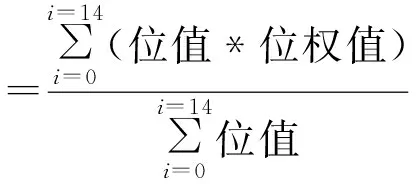
(1)
在該公式中,位值為光電電傳感器輸出的信號值取反,當光電傳感器檢測到黑線其位值為0,否則為1.權位值是每個光電傳感器區別于其他光電傳感器的編號,如圖3所示,每個黑色圓圈內部數字就是該光電傳感器的權位值。對于不同的光電傳感器檢測到黑線,其重心值是不同的,也是獨一無二的。因此重心法能夠準確的確定是哪個傳感器檢測到了黑線。在光電傳感器模塊的前排和后排使用重心法,可以分別找到檢測到黑線的光電管的重心值。通過重心值,查表得到舵機的偏轉角。當智能車沿直線路徑行駛時,智能車的中心軸與賽道中心黑線平行或重合,此時檢測到黑線的前排和后排光電傳感器的連線與智能車的中心軸平行或重合,智能車的運行方向無需偏轉,智能車可以快速行駛。
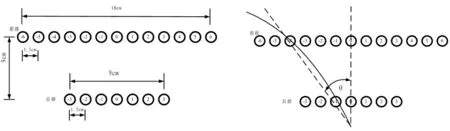
圖3 光電傳感器布局圖 圖4 智能車運行示意圖
當智能車沿彎道路徑行駛時,如圖4所示為光電智能車沿彎道運行的示意圖,圖中底部的黑色橢圓表示智能車的前輪。通的前、后排標號為0的黑色虛直線表示智能車的中心軸。黑色彎曲的實線表示智能車路徑上的導航黑線,前排標號為-4,后排標號為-1的光電管能檢測到賽道中心黑線。為了順利通過彎道,智能車需要偏轉一定的角度θ,θ為圖4中兩條黑色虛直線的夾角,計算夾角θ的公式可表示為:
(2)
其中,L4、L1表示標號為4和1的光電傳感器到智能車中心軸的距離,它們分別為6cm和1.5cm,L表示前排傳感器與后排傳感器的距離,為9cm.實際控制中,并不需要計算夾角θ的值。只需要建立tanθ的值與控制舵機偏轉角度θ的PWM值之間的關系表,通過查表控制智能車舵機的偏轉。
4 速度控制
智能車速度控制決定了智能車系統性能,賽道千變萬化的智能車運行系統是典型的非線性系統,很難找到最佳的智能車速度控制的方法,PID控制結構簡單、參數易于調整,可以應用于任何可控制對象。數字PID算法易于軟件實現,參數易于調整,在智能車系統中能夠取得較好的控制效果。速度控制的目標是使智能車能夠穩定、快速的行駛,并能在不同的路徑上實現不同速度的迅速切換。
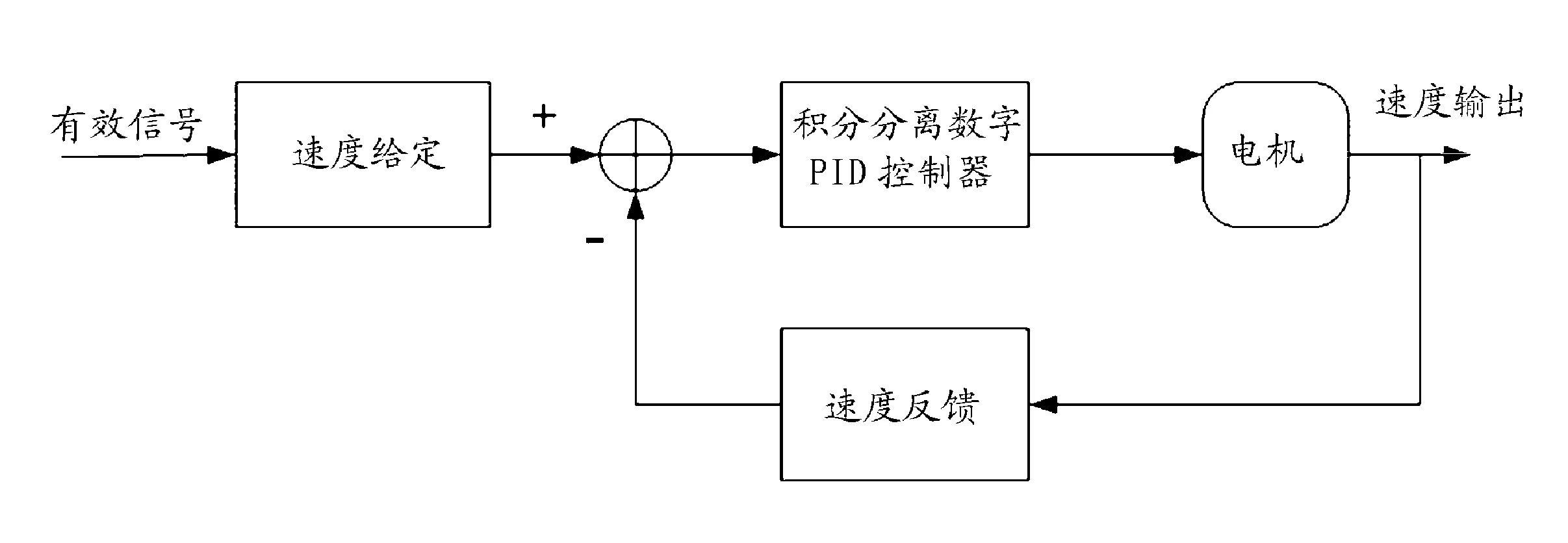
圖5 智能車閉環調速系統框圖
如圖5所示為智能車閉環調速系統框圖,該閉環系統由數字PID控制器、智能車電機、數字編碼器測速反饋環節等組成。位置式數字PID控制算法離散化為:
(3)
智能車調速控制系統使用位置式數值PID控制算法,存在速度超調過大,易震蕩劇烈,速度切換調整時間長等缺點,由于光電技術智能車信號檢測前瞻性一般,對車速的提高有一定的制約,通過對位置式數字PID算法的改進和實驗測試比較,最終確定采用積分分離PID控制算法,積分分離PID控制算法離散化公式為:
(4)
其中,KL為控制系數,當|e(k)|≤e0時,KL=1;當 |e(k)|>e0時,KL=0.e0為積分分離閥值當系。積分分離PID算法的控制原理是,當調速系統的偏差較大時,取消積分項的作用,當調速系統偏差減小到某一特定值e0時 ,積分項的起作用,這種方法有效的減小了智能車系統因行駛過程中的干擾引起的超調,并改善了系統動態特性。
5 系統仿真測試
使用MATLAB仿真軟件,建立光電傳感器智能車系統的運動控制模型,將智能車運動模型等效為一階慣性環節,在單位階躍信號輸入的情況下,使用位置式PID控制算法的速度輸出曲線如圖6所示,其中Kp=1.2,Ki=0.3,KD=0.03.該圖顯示位置式PID控制的速度輸出超調過大,振蕩劇烈,尤其在車速快速切換的情況下,會給智能車運行造成過大的震蕩。
在單位階躍輸入的情況下,使用積分分離式PID控制算法的速度輸出曲線如圖7所示,其中e0=0.5,Kp、Ki、KD三個參數保持不變。該圖顯示積分分離式PID控制的速度輸出超調小,震蕩小。速度變化平緩。
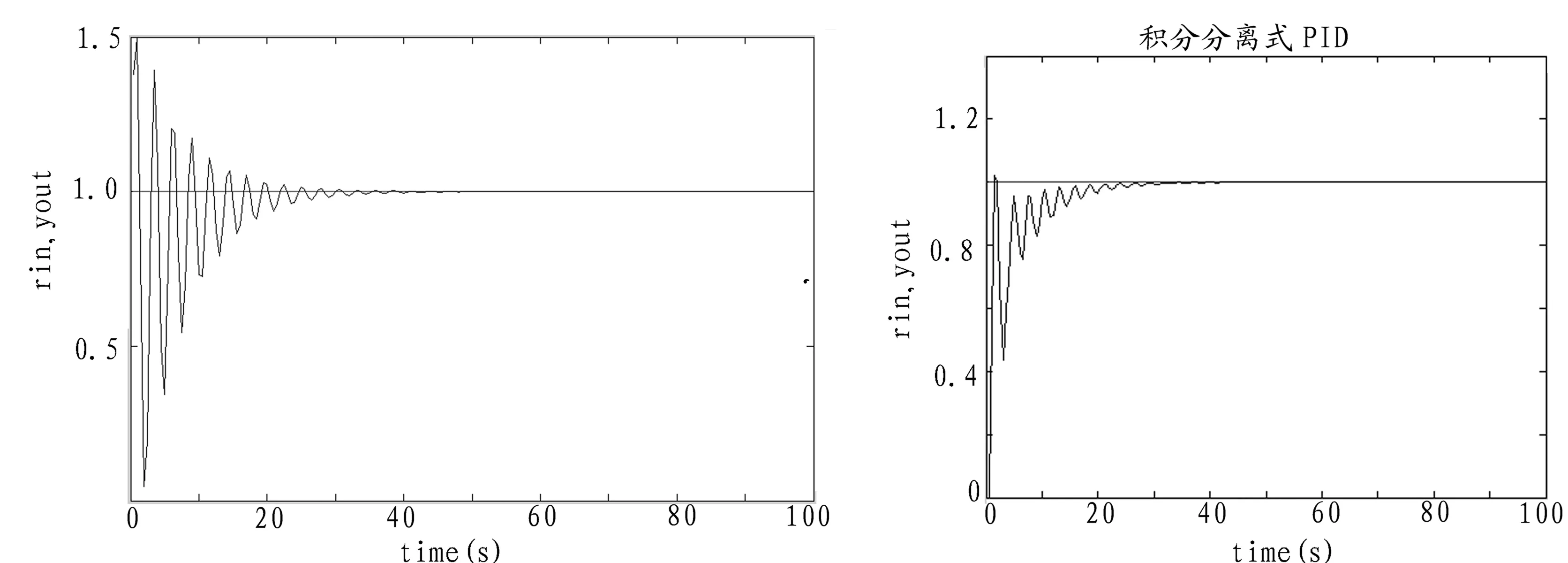
圖6 位置式PID控制速度輸出曲線 圖7 積分分離式PID控制速度輸出曲線
光電傳感器檢測到不同的路徑,決定智能車的速度給定值各不相同,對不同的彎、直道,使之能夠在保證穩定性的前提下,運行在其最佳速度上,能充分發揮智能車的速度潛能。
6 小結
實驗測試表明,基于光電傳感器的智能車系統,采用雙排光電傳感器檢測路徑信號,采用積分分離數字PID控制算法,實現智能車車速的閉環控制,具有很好的穩定性和靈敏性,極大地發揮了智能車的運行潛力。
本光電傳感器智能車,在第五屆全國大學生智能車競賽華南賽區的比賽中,在復雜多變的賽場賽道上,跑出了1.5m/s的平均速度,獲得了三等獎。
[1]祝亞峰,李書剛.基于紅外激光管的智能車設計[J]. 信息技術,2010,(6):109~111.
[2]胡長暉,葉夢君.基于電磁技術的智能車路徑設別的研究[J]. 湖北師范學院學報(自然科學版),2011,(2):54~58.
[3]吳建平,殷戰國.紅外反射式傳感器在自尋跡小車導航中的應用[J]. 中國公路學報,2001,14(3):96~100.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32