百噸級電傳動礦用自卸車輪邊驅動系統的配置優化
2013-09-07 08:53:36何建成申焱華張文明
中國機械工程 2013年22期
何建成 申焱華 張文明
北京科技大學,北京,100083
0 引言
據不完全統計,2011年,國產礦用自卸車銷量達到7567輛,與2010年銷量約5000輛相比,增長51.34%。其中,國內市場銷量5646輛,海外市場銷量1921輛,雙創歷史新高[1]。目前國內百噸級電傳動礦用自卸車的設計還主要處于模仿階段,如在確定輪邊減速器傳動比時,往往參照國際相近噸位車型,但國內自主生產的輪邊電機的性能與國際上先進電機有較大差距。因此有必要研究適合國內電機發展水平的輪邊驅動系統最佳配置方法。
1 傳動方式
百噸級礦用自卸車的傳動方式有兩種,即機械傳動和電傳動。機械傳動的傳遞結構簡圖如圖1所示,機械傳動機構主要包括發動機、離合器、變速箱、萬向節、傳動軸、主減速器、差速器、半軸,各部件之間主要是機械能的傳遞;電傳動結構簡圖如圖2所示,電傳動結構主要包括發動機、發電機、電動機、輪邊減速器,在動力傳遞過程中包含兩次機械能與電能的轉化及電能的傳遞。一次轉化是發電機將發動機傳遞的機械能轉化為電能,另一次轉化是電動機將電能轉化為機械能。
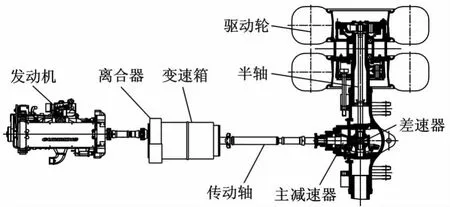
圖1 機械傳動結構簡圖
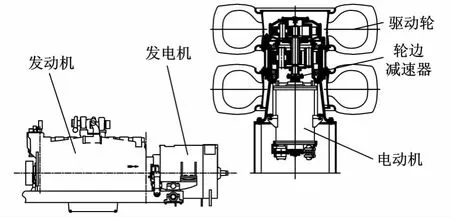
圖2 電傳動結構簡圖
表1所示為電傳動與機械傳動幾項重要性能的比較,電傳動除了傳動效率略低于機械傳動以外,其余幾項性能都要優于機械傳動,因此目前百噸級以上礦車,除了CAT部分車型采用機械傳動以外,其余的大都采用電傳動。
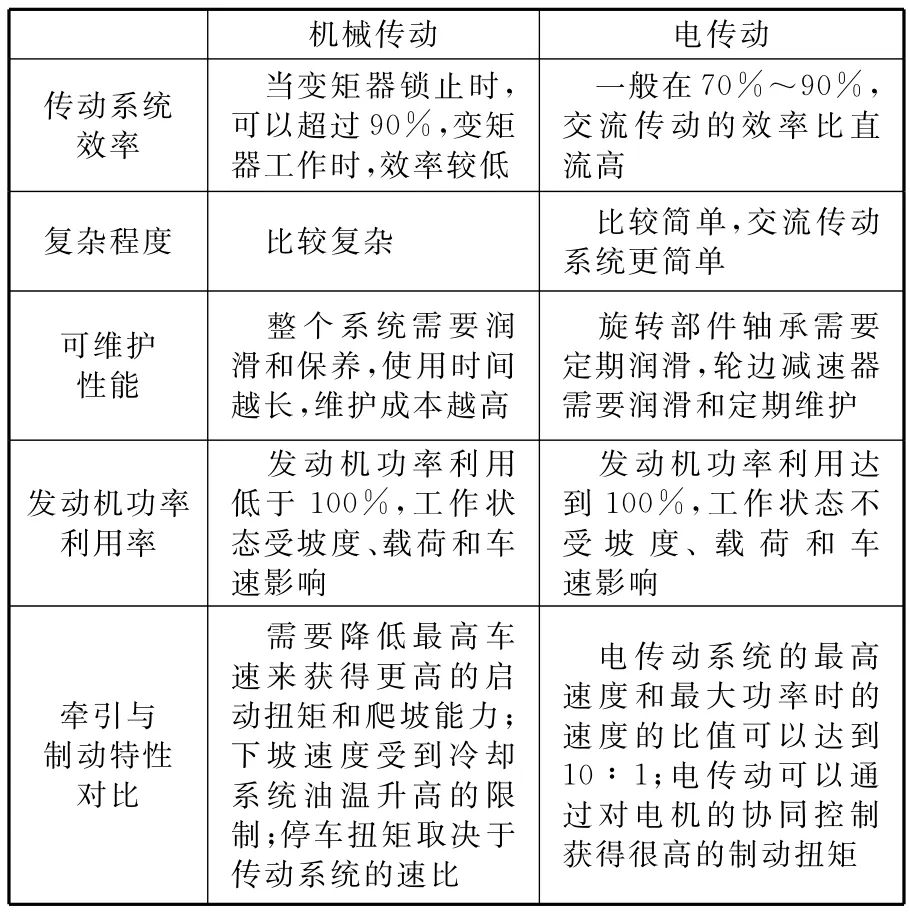
表1 機械傳動、電傳動性能比較
2 輪邊減速器結構及傳動比
電傳動礦用自卸車中,輪邊驅動系統是主要的動力傳遞系統,如圖3所示,主要包括電機和輪邊減速器兩部分。電動機將電能轉化為機械能,輪邊減速器將動力減速增扭傳遞到輪轂,以驅動輪胎轉動提供礦車行駛所需動力,是電傳動礦用自卸車中唯一的減速增扭機構。
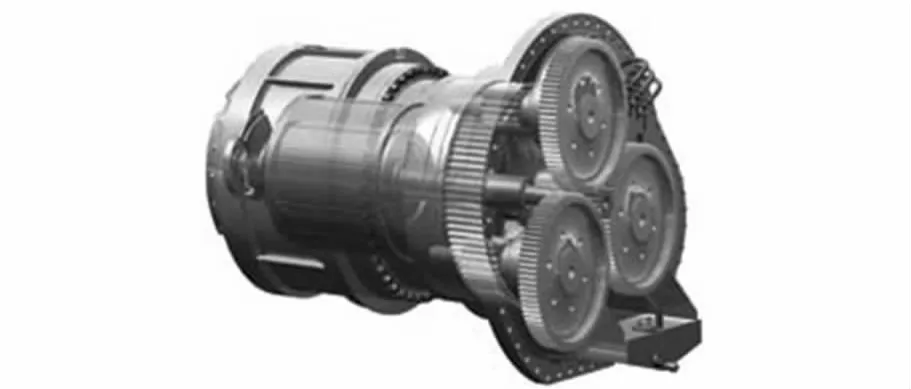
圖3 GE輪邊三級驅動系統
國內外礦用汽車輪邊減速器結構主要有三種,其傳遞結構原理圖如圖4~圖6所示[2-4]。國際礦用自卸車品牌中,BELAZ電傳動礦用自卸車輪邊減速器采用的是如圖4所示的輪邊二級行星減速機構,其余品牌車型大都采用如圖5、圖6所示的GE輪邊二級或三級減速機構,噸位較小的采用二級減速機構,噸位較大的采用三級減速機構。國內電傳動礦用自卸車也大都采用這三種行星減速機構。圖7所示為根據大噸位電傳動礦用自卸車需求設計的一種新型的輪邊三級行星減速機構,該機構具有傳動比變化范圍大、安全系數高、軸向空間利用率高等優點。
通過對 TEREX、BELAZ、HITACHI、KOMATSU、LIEBHERR五種品牌且載重從109t到360t,近30款車型輪邊減速器傳動比i進行對比和整理,按照滿載時礦車總量從小到大排列[5-9],得到如圖8所示的電傳動礦用自卸車輪邊減速器傳動比分布圖。圖9為按照不同品牌分類的輪邊減速器傳動比分布圖。
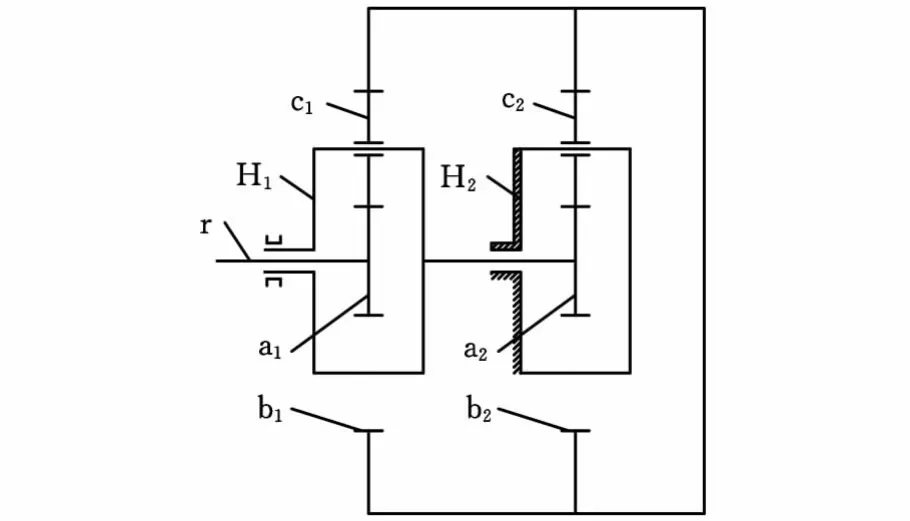
圖4 輪邊二級行星減速機構傳動原理圖
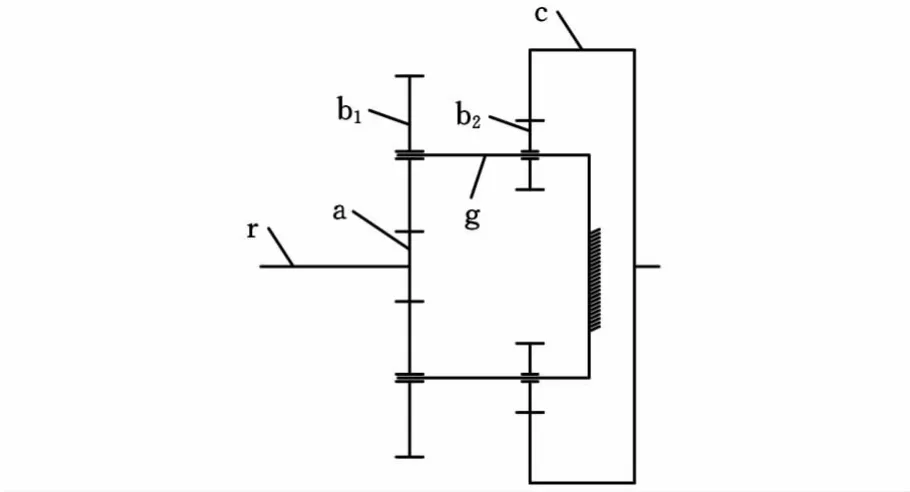
圖5 GE輪邊二級行星減速機構傳動原理圖
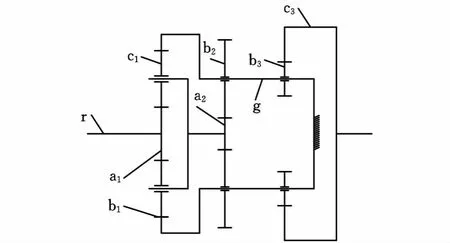
圖6 GE輪邊三級行星減速機構傳動原理圖
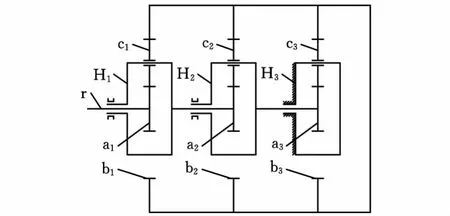
圖7 輪邊三級行星減速機構傳動原理圖
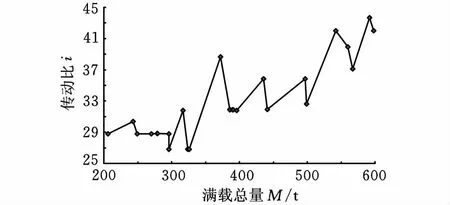
圖8 輪邊減速器傳動比分布圖
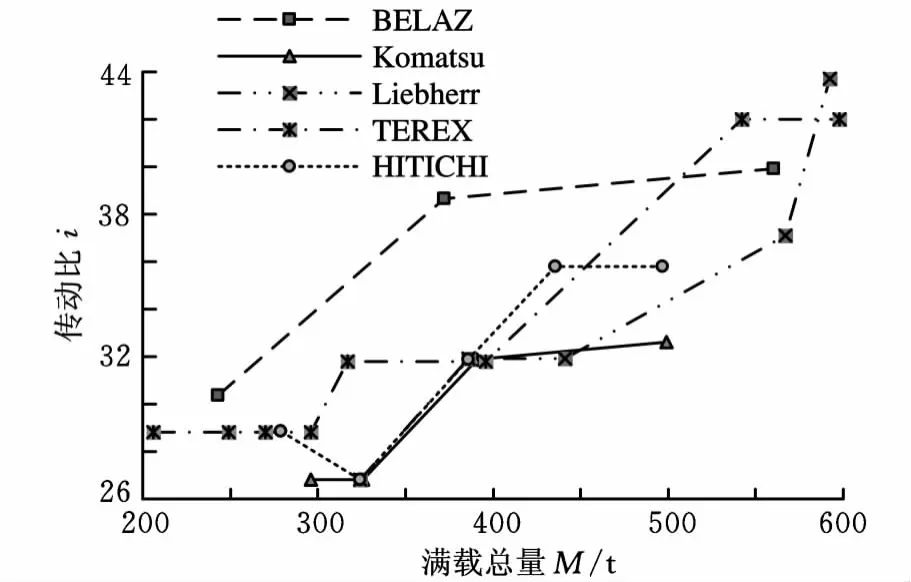
圖9 國際常見礦車輪邊減速器傳動比
由圖9可以看出,同一品牌車型,隨著滿載總量的增加,輪邊減速器傳動比有增大的趨勢,而且存在滿載總量相近車型的輪邊減速器傳動比相同的情況,也存在隨著滿載總量增大而輪邊減速器傳動比減小的情況,如HITACHIEH3000載重156.9t,滿載總量為278.9t,輪邊減速器傳動比為28.85,HITACHI EH3500載重193.3t,滿載總量為324.3t,輪邊減速器傳動比為26.83。結合圖8、圖9可以看出,對于不同品牌的車型,滿載總量相近時,傳動比不盡相同,且相差較大。如BELAZ 75306載重220t,滿載總量372t,輪邊減速器采用如圖4所示的輪邊二級行星減速器,傳動比為38.67,而Liebherr T262載重218t,滿載總量368t,輪邊減速器采用如圖5所示的GE輪邊二級行星減速器,傳動比為31.9。同時部分車型可以選用不同傳動比的輪邊減速器,如Liebherr T252,在載重相同、自重相同的情況下可以選配輪邊減速器傳動比為26.8或22.3,而TEREX MT6300給定的輪邊減速器傳動比選用范圍從32到42。
3 電機選型及輪邊減速器傳動比計算
通過上文分析,可以看出電傳動礦用自卸車選配的輪邊減速器傳動比并沒有隨噸位增大而一直增大,而是中間存在波動。因此,在確定輪邊減速器傳動比時不能單純以車輛噸位作為依據,車輛噸位的變化只是決定了行駛所需驅動力的大小和所需動力源即發動機功率大小。在對一款新型礦車進行設計時,其輪邊驅動系統基本設計流程如圖10所示。
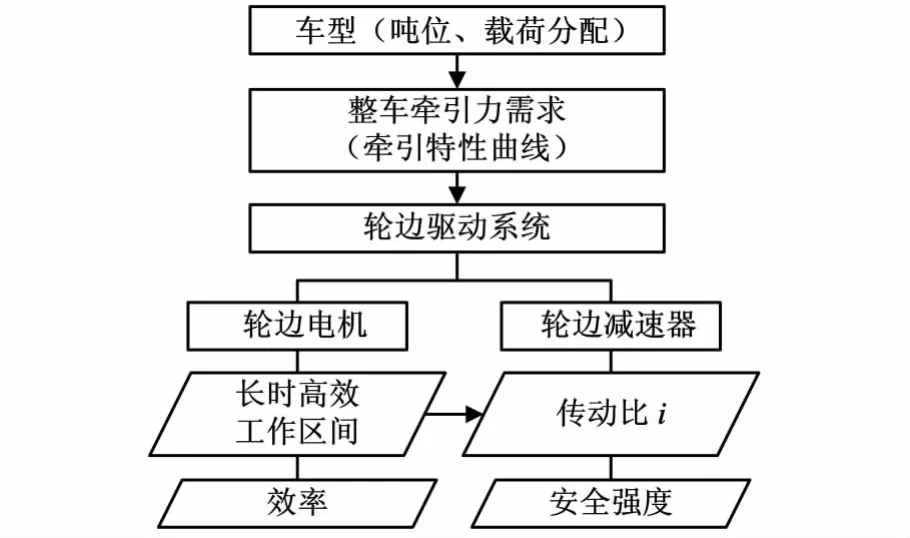
圖10 輪邊驅動系統基本設計流程
汽車行駛方程為[10]

其中,Ft為驅動力;Ff為滾動阻力,與路面滾動系數相關,礦山路面滾動系數一般取0.02;Fw為空氣阻力,在礦用汽車初期設計過程中,由于一般礦用汽車常用行駛速度在7.5~30km/h之間,且最高車速一般在65km/h以下,車速相對較低,所以在礦車一般不考慮空氣阻力Fw的影響;Fi為坡度阻力,行駛路面坡度有關,電傳動礦用自卸車的要求是最大爬坡度不應低于16%[11];Fj為加速阻力。
根據式(1)可以求得礦車在不同坡度上行駛時驅動力需求,但確定發動機功率大小還需要知道車輛行駛速度。在確定發動機功率時一般以礦車在8%坡度行駛時的功率需求為準。電傳動自卸車滿載時在8%坡度上爬長坡的穩定車速不應低于表2所規定的數值[11]。

表2 電傳動礦用自卸車穩定車速要求
由礦車在8%坡度行駛時驅動力及最低車速要求,根據公式P=Fv可以得到礦車行駛功率需求。但此功率并不能直接作為確定發動機功率的標準,在確定發動機功率時還需要考慮傳遞過程中發動機、發電機、電動機以及輪邊減速器等的能量傳遞在各環節中的功率損失。另外,為了保證足夠的動力,在確定發電機、電動機功率時還應考慮存在一定的過載空間,一般在選定電機功率時需要20%以上的過載牽引空間。
根據功率選定電機以后,就得到電機的功率外特性曲線和傳動效率變化曲線。圖11為設計的某載重220t電傳動礦用自卸車選用電機的恒功率外特性曲線和效率曲線,電機轉速達到292.4r/min時,開始進入恒功區,直到電機達到最高轉速。但電機轉速低于651.5r/min時,只能持續工作一定時間,不能長時間持續工作,且電機工作效率較低,小于93%;轉速達到651.5r/min以上,電機才可以長時間工作,電機效率也可提高到93%以上。
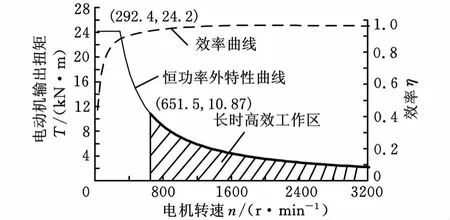
圖11 某礦車用電機外特性和效率曲線
為了保證礦車的持續工作和傳動效率,輪邊減速器傳動比i需要滿足礦車常用運行速度空間7.5~30km/h對應電機的長時高效工作區間,圖11示出了電機長時高效工作區間即電機轉速大于651.5r/min的空間。該高效工作區間范圍較大,在確定傳動比時為了保證車輛最高轉速,一般讓電機長時高效工作區起點來對應礦車運行速度7.5km/h來確定傳動比i。即

式中,n為電機轉速,即電機長時高效工作區初始點轉速;v為礦車運行速度,一般取值7.5km/h;r為輪胎滾動半徑。
在220t礦車設計中,選用輪胎滾動半徑為1.7075m,根據式(2)求得輪邊合理傳動比為55.89。但在實際設計過程中,考慮到空間、結構形式、齒輪強度、行星齒輪安裝條件等因素,最終傳動比確定為55.09。BELAZ 75306載重也是220t,但輪邊減速器傳動比為38.67,這是因為其選用電機DK-724的長時高效工作區起點轉速低于國內電機決定的起點轉速。
4 結語
國際電傳動礦用自卸車輪邊減速器傳動比隨噸位增加有增大趨勢,但中間存在著波動。對輪邊驅動系統中輪邊電機和輪邊減速器進行優化配置以滿足整車牽引特性需求,輪邊電機長時高效工作區決定輪邊減速器傳動比的初始值。在輪邊減速器進一步設計的過程中,還需考慮空間、結構形式、齒輪強度等因素。根據本文方法設計的220t電動輪礦用自卸車已經生產完畢并投入試驗,運行良好,證明了所述配置方法的可行性。
[1]沈溪,盛太蓮.2011年國產礦用自卸車銷量分析及展望[J].商用汽車,2012,(4):14-17.Shen Xi,Sheng Tailian.Analysis and Outlook of Domestic Mining Dump Truck’s Sales in 2011[J].Commercial Vehicle,2012(4):14-17.
[2]何建成,張文明,申焱華,等.電動輪礦用自卸車輪邊三級行星減速器設計[J].煤礦機械,2012,33(6):46-48.He Jiancheng,Zhang Wenming,Shen Yanhua,et al.Three-stage Planetary Wheel Reducer Design of Electric Drive Mining Dump Truck[J].Coal Mining Machinery,2012,33(6):46-48.
[3]楊鐘勝.GE788電動輪自卸車輪邊減速器NW行星輪系減速機構的綜合評述[J].汽車工藝與材料,2008(11):52-56.Yang Zhongsheng.Comprehensive Review of GE788 NW Planetary Gear Train’s Institutions Used by Electric Wheel Dump Truck’s Wheel Reducers[J].AT&M,2008(11):52-56.
[4]焦萬銘,馮雅麗,楊玨.礦用汽車輪邊二級行星減速器設計[J].礦山機械,2008,36(21):38-39.Jiao Wanming,Feng Yali,Yang Jue.Two-stage Planetary Wheel Reducer of Mine Trucks[J].Mining & Processing Equipment,2008,36(21):38-39.
[5]Unit Rig,O&K Mining,Payhauler:Mining Truck[OL].5400S.49th West Ave.,P.O.Box 3107,Tulsa.[2012-01-21].http://www.terex.com.
[6]Belarusian Auto Works:Belaz[OL].40let Oktyabrya str.4,222160,Zhodino,Republic of Belarus.[2012-01-21].http://gpfk.ru/userfiles/.
[7]Hitachi Construction Machinery(America)Corp:Hitachi[OL].20411Imperial Valley Dr.Houston.[2012-01-21].http://www.hcmacorp.com.
[8]Komatsu:komatsumining[OL].440N.Fairway Dr.P.O.Box 8112.[2012-01-21].http://www.komatsumining.com.
[9]Liebherr Mining Equipment Co.:Technical Description Mining Truck[OL].4100Chestnut Avenue,Newport News,VA 23607,USA.[2012-01-21].http://www.liebherr.com.
[10]余志生.汽車理論[M].3版.北京:機械工業出版社,2000.
[11]中華人民共和國機械工業部.JB/T 7641.1-1994電傳動礦用自卸車技術條件[S].北京:機械科學研究院出版社,1994.
