基于船舶自動(dòng)識(shí)別系統(tǒng)的局部縮減航道元胞自動(dòng)機(jī)模型
2013-09-11 01:58:06馮宏祥肖英杰孔凡邨楊小軍
上海海事大學(xué)學(xué)報(bào) 2013年3期
馮宏祥,肖英杰,孔凡邨,楊小軍
(上海海事大學(xué)a.商船學(xué)院;b.航運(yùn)仿真技術(shù)教育部工程研究中心,上海 201306)
0 引言
元胞自動(dòng)機(jī)(Cellular Automata,CA)模型具有空間離散化、時(shí)間離散化、狀態(tài)離散化的特點(diǎn),其算法簡(jiǎn)單靈活,易于在計(jì)算機(jī)上實(shí)現(xiàn),因而在交通流研究中得到廣泛的應(yīng)用和發(fā)展.[1-9]目前,國(guó)內(nèi)外交通領(lǐng)域?qū)A的研究高度集中在陸路交通方面,對(duì)水上交通流的研究和應(yīng)用則相對(duì)少得多[10],仍處于方興未艾的狀態(tài).文獻(xiàn)[10]運(yùn)用CA模型對(duì)馬六甲海峽的船舶交通流進(jìn)行應(yīng)用研究;文獻(xiàn)[11]和[12]分別將CA與排隊(duì)論、Agent相結(jié)合對(duì)船舶交通流進(jìn)行初步研究;文獻(xiàn)[13]根據(jù)Wolfram 184規(guī)則和船舶交通流的實(shí)際情況,嘗試構(gòu)建船舶交通流的 CA模型.
正如文獻(xiàn)[10]和[13]所述,水上交通較之陸路交通存在以下難點(diǎn):(1)不同于規(guī)范化的車(chē)輛,船舶的種類(lèi)多、尺寸差別大;(2)船舶航行環(huán)境廣闊,航行自由度高;(3)交通管制及助航設(shè)施相對(duì)簡(jiǎn)單,而航行規(guī)則復(fù)雜且技術(shù)性強(qiáng);(4)陸路交通中的更新規(guī)則不能簡(jiǎn)單地適用于船舶交通流.因此,建立CA模型應(yīng)考慮具體的船舶交通流情況.
1 模型
1.1 假設(shè)
為了將CA模型引入船舶交通流領(lǐng)域,進(jìn)行如下假設(shè):(1)所有船舶均為理想船舶,各類(lèi)型船舶的長(zhǎng)度進(jìn)行規(guī)范化處理;處理后的船舶長(zhǎng)度符合一定統(tǒng)計(jì)規(guī)律的離散分布,其規(guī)律由交通流觀測(cè)得到.(2)每條通道中只允許一艘船舶單向通行,只考慮船舶長(zhǎng)度而忽略船舶寬度的影響.(3)航道為理想航道,船舶在航道中行駛不存在吃水限制,不考慮風(fēng)、浪、流、淺水效應(yīng)及岸壁效應(yīng)等影響;航道作順直化處理,軸向始終向前保持不變,相當(dāng)于船舶轉(zhuǎn)向過(guò)程中不減速.(4)船舶換道時(shí)忽略換道過(guò)程中的橫移等操縱特性行為,若滿足換道條件,則直接換置到相鄰?fù)ǖ赖南乱晃恢?(5)考慮到國(guó)際海事組織(International Maritime Organization,IMO)第73屆海安會(huì)通過(guò)的《1974年國(guó)際海上人命安全公約》修正案已于2002年7月1日強(qiáng)制生效,認(rèn)為航道中的所有船舶均已配備自動(dòng)識(shí)別系統(tǒng)(Automatic Identification System,AIS).(6)采用開(kāi)放邊界條件,船舶生成服從一定的分布,到達(dá)航道末端時(shí)退出.船舶生成規(guī)律由船舶交通流觀測(cè)得到.
1.2 基于AIS的NaSch船舶交通流模型
結(jié)合船舶交通流實(shí)際及以上假設(shè),船舶(X,L,V)隨機(jī)分布在長(zhǎng)度為n的一維離散元胞鏈上,具有位置X、長(zhǎng)度L和速度V等3類(lèi)屬性.通過(guò)AIS通信,每艘船舶可以接收到周?chē)渌霸趖時(shí)刻的距離(位置)、速度、長(zhǎng)度、最近會(huì)遇點(diǎn)(Closet Point of Approaching,CPA)以及船名等必要的避碰信息.基于這些信息,可以精確地判斷t+1時(shí)刻這些船舶的距離(位置)、速度、與本船的相對(duì)位置關(guān)系以及是否構(gòu)成碰撞危險(xiǎn)等信息,從而決定本船在t時(shí)刻的行動(dòng).元胞示意圖見(jiàn)圖1.

圖1 元胞示意圖
每個(gè)元胞最多只能同時(shí)被1艘船舶占據(jù),即Xi(t)∈{0,1}.第i艘船舶占據(jù)從i開(kāi)始的從左到右相鄰的Li(t)個(gè)元胞,且 Li(t)∈ {1 ,…,Lmax},Lmax為最大船舶長(zhǎng)度.Vi(t)為第i艘船舶在t時(shí)刻的速度,且 Vi(t)∈ {0,1,…,Vmax},Vmax為最高限速.di(t)為t時(shí)刻第i艘船舶與前方最近船舶f間的距離

在開(kāi)放性邊界條件下,船舶自西向東行駛,在每個(gè)離散的t→t+1時(shí)間步,船舶狀態(tài)按如下規(guī)則進(jìn)行同步更新:
(1)加速過(guò)程

(2)減速過(guò)程

(3)以概率p隨機(jī)慢化

(4)位置、船舶尺寸及速度更新.原船舶尺寸、位置及速度
新船舶尺寸、位置及速度
特別地,當(dāng)Li(t)=1,且不考慮船舶之間的安全距離和相對(duì)速度時(shí)(即沒(méi)有AIS信息),本模型退化為經(jīng)典的NaSch模型.
加速規(guī)則反映出船舶駕引人員有追求以最大限速行駛的愿望;減速規(guī)則是為與前船保持安全距離;隨機(jī)減速概率用于對(duì)船舶的不確定性延遲行為進(jìn)行仿真,隨機(jī)慢化參數(shù)與駕駛行為的3種特性有關(guān):最大速度時(shí)的速度波動(dòng)、制動(dòng)時(shí)減速的過(guò)度反應(yīng)、加速時(shí)的延遲.
1.3 基于AIS的航道局部縮減船舶交通流模型
NaSch船舶交通流模型適用于一般的單通道航道船舶交通流情況.在雙通道航道局部縮減時(shí),船舶將被迫變道(見(jiàn)圖2),需要加入換道規(guī)則控制船舶的換道行為.其規(guī)則如下:
(1)警戒區(qū)外,每個(gè)通道都視為獨(dú)立的單通道,每艘船在各自通道上按照 NaSch規(guī)則并行更新;(2)警戒區(qū)內(nèi),船舶減速航行,最高限速?gòu)腣max減至V'max,只有右通道船舶可以根據(jù)換道規(guī)則并行地向左通道變道;(3)縮減段為單通道,船舶以安全航速行駛.
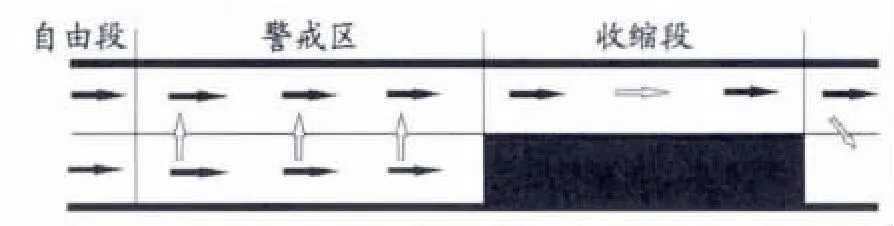
圖2 基于AIS的航道局部縮減船舶交通流模型示意圖
換道規(guī)則為
式中:di,other(t+1)和 di,back(t+1)分別為在 t+1 時(shí)刻第i艘船與鄰道上相鄰的前后船之間的距離,dsafe1,dsafe2和dsafe3分別為本船與前船、鄰道前船及后船之間的安全距離.式(7)表示換道動(dòng)機(jī),即在本道上第i艘船前方?jīng)]有足夠空間讓其按期望速度行駛;式(8)表示鄰道的行駛條件,即第i艘船在鄰道上比在本道上行駛條件更好;式(9)為安全條件,表示第i艘船換道不會(huì)造成鄰道后面最近船舶減速.
2 算法及模擬
上述基于AIS的NaSch船舶交通流模型以及航道局部縮減船舶交通流模型可以用圖3和4中的算法描述.通過(guò)開(kāi)發(fā)可視性軟件,船舶交通流模擬更直觀,更容易分析.圖5為基于AIS的NaSch船舶交通流模型的單通道時(shí)空斑圖;圖6為基于AIS的NaSch船舶交通流模型的單通道堵塞及恢復(fù)時(shí)空斑圖(圖中n=1500,航道初始狀態(tài)有30艘船舶,船舶到達(dá)率為4,p=0.25).圖5中,航道中的船舶隨著時(shí)間的推移并行向下游更新船位,其空間軌跡呈現(xiàn)出流體特征;圖6中的某船舶運(yùn)行300個(gè)步長(zhǎng)后在1200長(zhǎng)度元胞處出現(xiàn)故障停車(chē),導(dǎo)致航道堵塞,交通流聚集波迅速向上游傳播,500個(gè)步長(zhǎng)后該船舶恢復(fù)正常,堵塞的交通流開(kāi)始消散.
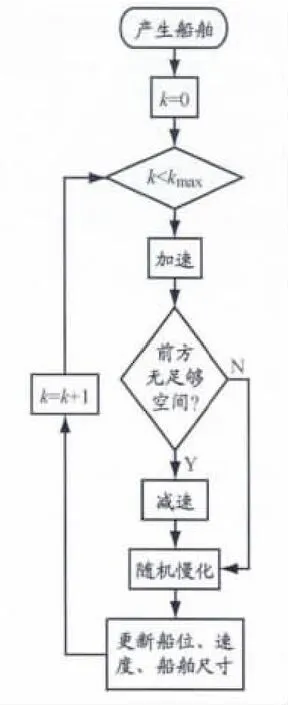
圖3 基于AIS的NaSch船舶交通流模型
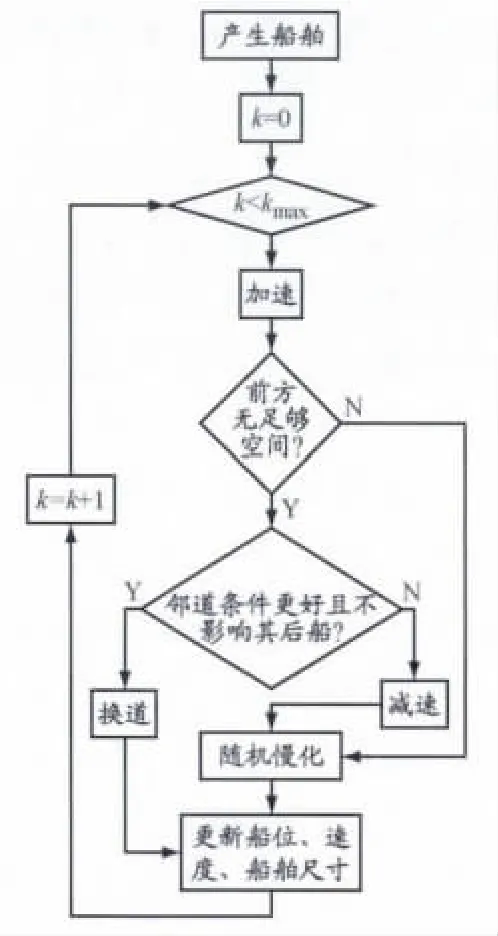
圖4 基于AIS的航道局部縮減船舶交通流模型
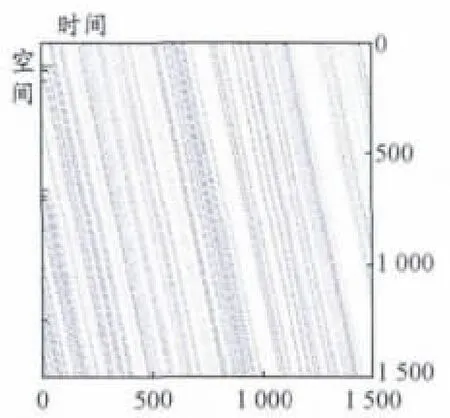
圖5 船舶交通流時(shí)空斑圖
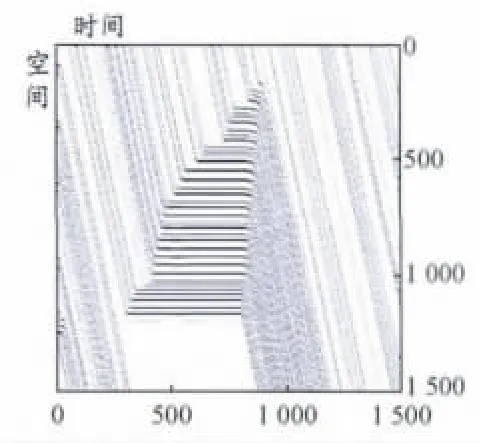
圖6 船舶交通流航道堵塞-恢復(fù)時(shí)空斑圖
圖7為可通航通道的時(shí)空斑圖,可以看到聚集波迅速向上游傳播,交通流呈現(xiàn)明顯的波動(dòng)特征.圖8為封閉通道的時(shí)空斑圖,其上游也出現(xiàn)波動(dòng)現(xiàn)象.
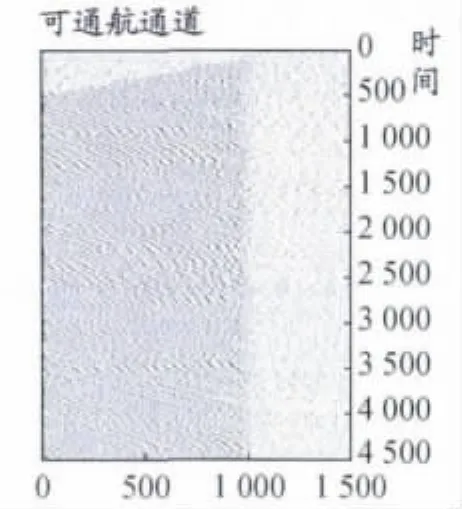
圖7 航道局部縮減可通航通道時(shí)空斑圖
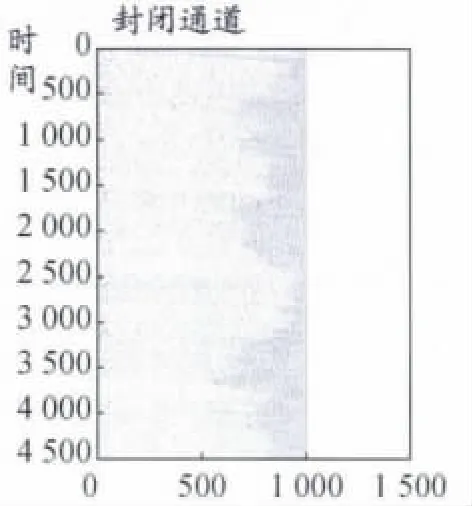
圖8 航道局部縮減封閉通道時(shí)空斑圖
3 應(yīng)用實(shí)例
假設(shè)某單側(cè)為雙通道的航道,其單側(cè)航道由主航道和輔航道構(gòu)成.航道長(zhǎng)30 n mile,主航道上為大型船舶,其尺度 L∈[90,300](m),速度 V∈[10,16](n mile/h);輔航道上為小型船舶及按規(guī)定只能在輔航道行駛的船舶,船舶尺度L∈[30,120](m),速度 V∈[2,12](n mile/h);警戒區(qū)限速10 n mile/h.各通道內(nèi)船舶不得追越或并排行駛.
正常情況下,大小船舶各自在主航道和輔航道上航行,小型船舶不得進(jìn)入主航道妨礙大型船舶通行.警戒區(qū)內(nèi),船舶以安全航速行駛,最高航速不得超過(guò)限速以策安全;在不影響大型船舶安全的前提下,小型船舶在警戒區(qū)內(nèi)可逐漸向主航道變道,與大型船舶流合并,依次通過(guò)航道縮減段.
3.1 元胞尺寸及參數(shù)的確定
一般地,元胞尺寸越小,模擬越能體現(xiàn)船舶的微觀行為,仿真度就越高.但是隨著元胞尺寸的縮小,元胞數(shù)量將成倍增加,算法復(fù)雜度為O(n2).因此,元胞尺寸通常是在考慮計(jì)算精度和計(jì)算復(fù)雜性的基礎(chǔ)上根據(jù)專(zhuān)家經(jīng)驗(yàn)確定的.[10]本研究取每個(gè)元胞長(zhǎng)度為30 m.那么,航道長(zhǎng)度為1852個(gè)元胞;主航道船舶尺度 L∈[3,10],速度 V∈[10,16];輔航道船舶尺度 L∈[1,4],速度 V∈[2,12];警戒區(qū)限速10 n mile/h.船舶更新步長(zhǎng)取1 min,運(yùn)行周期為一天即1440個(gè)步長(zhǎng).
3.2 船舶模型的建立
根據(jù)船舶交通流實(shí)態(tài)觀測(cè),船舶的到達(dá)服從愛(ài)爾朗分布,船頭時(shí)距服從負(fù)指數(shù)分布,船長(zhǎng)及船速服從正態(tài)分布.
3.3 船舶領(lǐng)域理論與安全距離
船舶領(lǐng)域[14]最早由日本學(xué)者藤井彌平提出.他認(rèn)為航行條件下船舶領(lǐng)域通常是一個(gè)以本船為中心的橢圓,其長(zhǎng)軸/短軸尺寸為8L/3.2L(L為船長(zhǎng));當(dāng)航行在需要減速的港口內(nèi)部和狹窄的海峽時(shí),船舶領(lǐng)域尺寸減小到6L/1.6L.不過(guò)該定義一直以來(lái)被認(rèn)為相對(duì)保守,故船舶領(lǐng)域偏大.文獻(xiàn)[15]通過(guò)雷達(dá)觀測(cè)認(rèn)為航行船舶的確客觀存在著船舶領(lǐng)域,該領(lǐng)域前后縱向距離為4.8L,前后比例約為1.7∶1,左右距離為3.2L.本研究認(rèn)為船舶間最小安全距離的確定應(yīng)以各船的船舶領(lǐng)域不受侵犯為原則,那么每艘船舶與其他船舶的最小安全距離為

式中:dsafe1,dsafe2,dsafe3分別為本船與前船、鄰道前船、鄰道后船之間的安全距離;Lownship為本船船長(zhǎng);Lforeship為前船船長(zhǎng);Lo,foreship為鄰道前船船長(zhǎng);Lo,backship為鄰道后船船長(zhǎng).
3.4 數(shù)值模擬與結(jié)果討論
根據(jù)上述模型及條件進(jìn)行仿真實(shí)驗(yàn)以探求航道船舶流量與警戒區(qū)長(zhǎng)度和船舶到達(dá)率的關(guān)系.實(shí)驗(yàn)中,將警戒區(qū)長(zhǎng)度、主航道船舶到達(dá)率、輔航道船舶到達(dá)率作為可調(diào)節(jié)的參數(shù),每個(gè)參數(shù)的仿真實(shí)驗(yàn)重復(fù)進(jìn)行20次并取平均值以消除不同初態(tài)的影響.
本文中的船舶到達(dá)率是指單位時(shí)間(1 min)內(nèi)的平均船舶到達(dá)艘次,例如“0”表示沒(méi)有船舶到達(dá),“6”表示1 min內(nèi)船舶到達(dá)6艘次,“主1”為主航道到達(dá)1艘次,“輔2”表示輔航道到達(dá)2艘次.n為航道長(zhǎng)度,1n/20~9n/20表示不同的警戒區(qū)長(zhǎng)度.
3.4.1 警戒區(qū)長(zhǎng)度與船舶流量之間的關(guān)系
圖9~11給出主航道、輔航道及主航道+輔航道(以下稱(chēng)單側(cè)航道)在不同船舶到達(dá)率條件下船舶流量與警戒區(qū)長(zhǎng)度的關(guān)系.
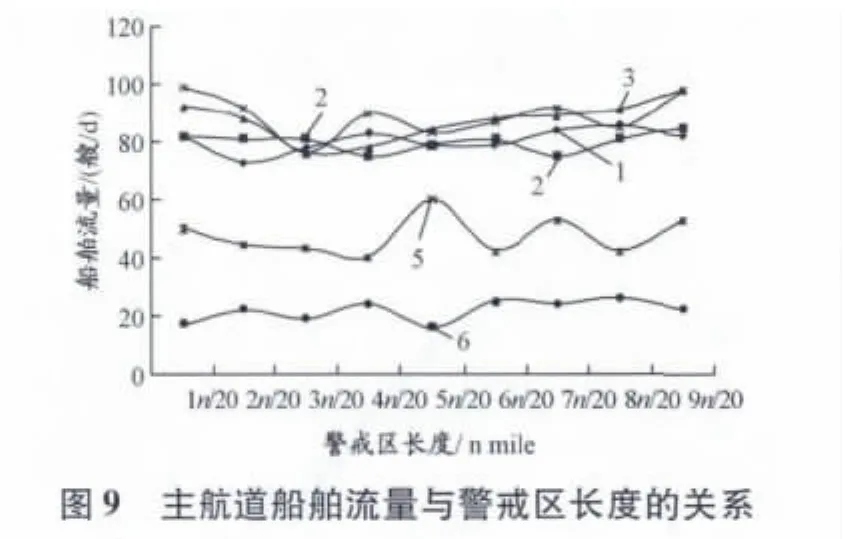
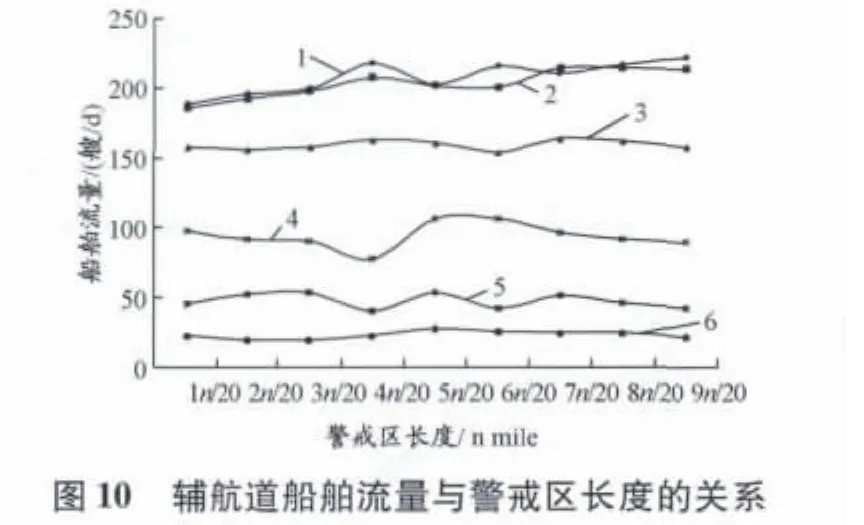
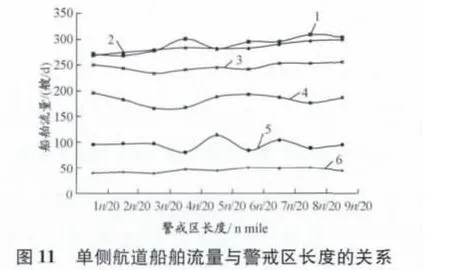
從圖中可以看出,當(dāng)船舶到達(dá)率確定時(shí),航道的船舶流量與警戒區(qū)長(zhǎng)度無(wú)關(guān).因此,警戒區(qū)長(zhǎng)度的設(shè)置對(duì)僅以數(shù)量計(jì)的船舶流量沒(méi)有明顯影響.
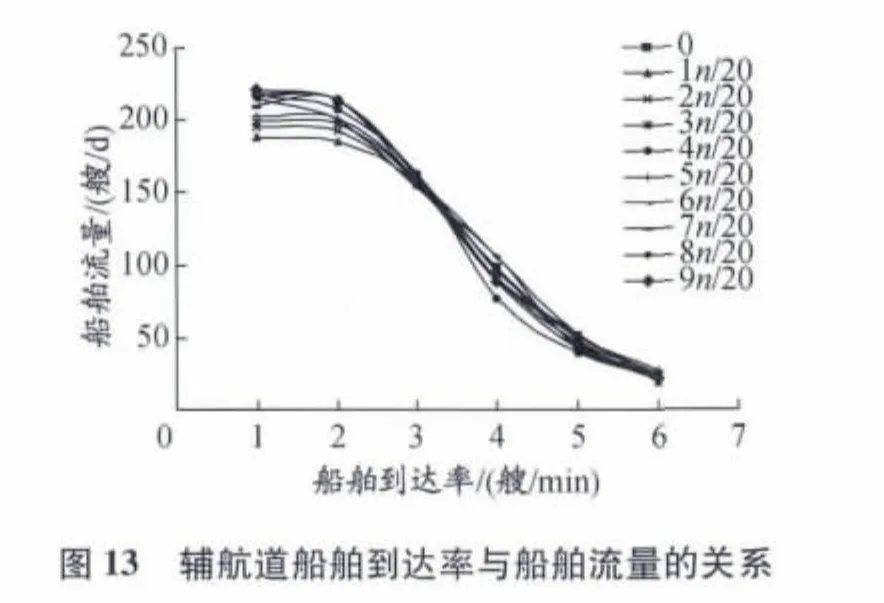
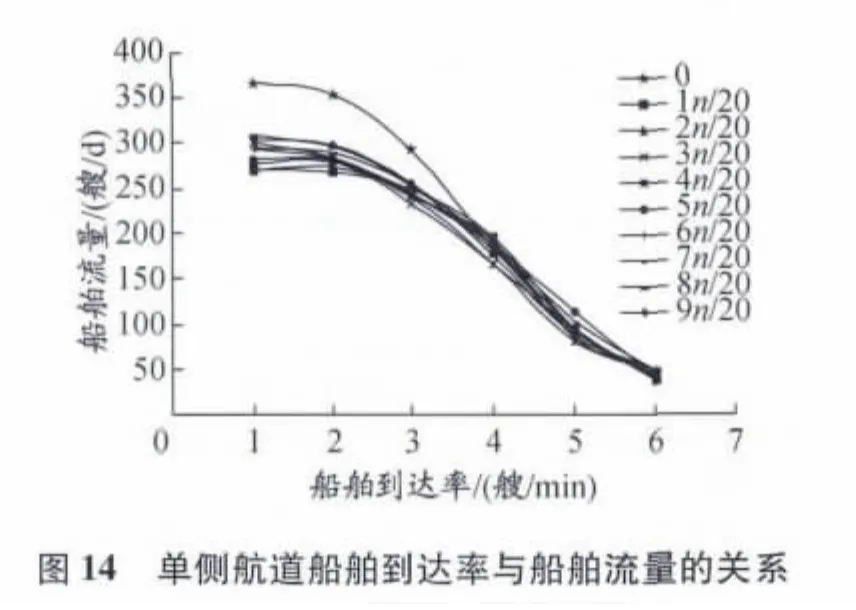
3.4.2 航道船舶到達(dá)率與船舶流量的關(guān)系
圖12~14給出主航道、輔航道及單側(cè)航道在不同警戒區(qū)長(zhǎng)度條件下船舶流量與船舶到達(dá)率的關(guān)系.從圖13和14可以看出,當(dāng)警戒區(qū)長(zhǎng)度確定時(shí),輔航道以及單側(cè)航道的船舶流量隨著船舶到達(dá)率的增大而單調(diào)遞減,其中輔航道遞減的幅度和趨勢(shì)始終與航道正常情況下的狀況(警戒區(qū)長(zhǎng)度為0)保持一致(見(jiàn)圖13).因此,輔航道的關(guān)閉與否對(duì)輔航道的小型船舶基本沒(méi)有影響,這可能與小型船舶主動(dòng)換道的靈活性有關(guān).

不同的是,圖12中主航道的船舶流量先隨著船舶到達(dá)率的增加而緩慢增大,當(dāng)船舶到達(dá)率為4時(shí)達(dá)到最大值,然后單調(diào)遞減,其幅度和趨勢(shì)與航道正常情況下的狀況(警戒區(qū)長(zhǎng)度為0)一致.其原因是,隨著船舶到達(dá)率的增加,航道的船舶密度逐漸減小,船速增大;當(dāng)船舶到達(dá)率達(dá)到某一臨界值時(shí),船舶交通流開(kāi)始進(jìn)入自由狀態(tài),船舶密度繼續(xù)減小,船舶速度保持穩(wěn)定,船舶流量減小.
3.4.3 輔航道船舶到達(dá)率對(duì)船舶流量的影響
從圖15可以看出,當(dāng)主航道船舶到達(dá)率較小(<4)時(shí),若輔航道的船舶到達(dá)率小于4,則主航道的船舶流量幾乎不受輔航道船舶的影響,其原因是主航道的船舶交通流已經(jīng)趨于穩(wěn)定的飽和狀態(tài);當(dāng)輔航道上的船舶到達(dá)率繼續(xù)增加時(shí),主航道上的船舶流量也單調(diào)增加,且逐步趨于自由狀態(tài)(輔航道船舶到達(dá)率為0).當(dāng)主航道上船舶到達(dá)率較大(≥4)時(shí),主航道上的船舶交通流處于自由狀態(tài),輔航道上的船舶對(duì)主航道船舶幾乎沒(méi)有影響.

圖15 主航道船舶流量與輔航道船舶到達(dá)率的關(guān)系
因此,當(dāng)主航道上的船舶密度較大時(shí),通過(guò)控制輔航道船舶的到達(dá)率,可以有效提高主航道大型船舶的通過(guò)能力.
4 結(jié)論
通過(guò)對(duì)基于AIS的航道局部縮減船舶交通流模型的模擬研究發(fā)現(xiàn):(1)整個(gè)單側(cè)航道的船舶通過(guò)數(shù)量與警戒區(qū)長(zhǎng)度的設(shè)置無(wú)關(guān);(2)當(dāng)輔航道關(guān)閉時(shí),輔航道上的小型船舶基本不受影響;(3)主航道上的船舶數(shù)量與其到達(dá)率呈現(xiàn)先升后降的關(guān)系;(4)主航道上的船舶流量與輔航道的船舶到達(dá)率存在臨界點(diǎn),利用該關(guān)系可以對(duì)輔航道的小型船舶進(jìn)行交通管制以保障主航道的暢通.
由于CA模型便于計(jì)算機(jī)實(shí)現(xiàn),其規(guī)則易于根據(jù)實(shí)際情況進(jìn)行修改,在船舶交通流研究中有較好的應(yīng)用前景.
[1]SCHADSCHNEIDER A.Traffic flow:a statistical physics point of view[J].Physica A,2002,313(1-2):153-187.
[2]TIAN Ran.The mathematical solution of a cellular automaton model which simulates traffic flow with a slow-to-start effect[J].Discrete Appl Math,2009,157(13),2904-2917.
[3]TIAN Junfang,JIA Bin,LI Xingang,et al.Synchronized traffic flow simulating with cellular automata model[J].Physica A:Stat Mech & its Applications,2009,388(23):4827-4837.
[4]LáRRAGA M E,ALVAREZ-ICAZA L.Cellular automaton model for traffic flow based on safe driving policies and human reactions[J].Physica A:Stat Mech & its Applications,2010,389(23):5425-5438.
[5]LO Shihching,HSU Chiahung.Cellular automata simulation for mixed manual and automated control traffic[J].Math & Comput Modelling,2010,51(7-8):1000-1007.
[6]JIN Chengjie,WANG Wei.The influence of nonmonotonic synchronized flow branch in a cellular automaton traffic flow model[J].Physica A:Stat Mech & its Applications,2011,390(23/24):4184-4191.
[7]NETO J P L,LYRA M L,DA SILVA C R.Phase coexistence induced by a defensive reaction in a cellular automaton traffic flow model[J].Physica A:Stat Mech & its Applications,2011,390(20):3558-3565.
[8]YELDAN ?znur,COLORNI Alberto,LUè Alessandro,et al.A stochastic continuous cellular automata traffic flow model with a multi-agent fuzzy system[J].Procedia-Social& Behavioral Sci,2012,54:1350-1359.
[9]MU Rui,YAMAMOTO Toshiyuki.An analysis on mixed traffic flow of conventional passenger cars and microcars using a cellular automata model[J].Procedia-Social& Behavioral Sci,2012,43:457-465.
[10]QU Xiaobo,MENG Qiang.Development and applications of a simulation model for vessels in the Singapore Straits[J].Expert Systems with Applications,2012(39):8430-8438.
[11]陳健,雷洪,田帥,等.基于排隊(duì)論的元胞自動(dòng)機(jī)在港口交通流的研究[J].沈陽(yáng)師范大學(xué)學(xué)報(bào):自然科學(xué)版,2009,27(3):319-322.
[12]嚴(yán)飛,潘明陽(yáng),王德強(qiáng),等.基于智能體和元胞自動(dòng)機(jī)的海上交通流模擬[J].大連海事大學(xué)學(xué)報(bào),2009,35(2):89-92.
[13]LIU Jingxian,ZHOU Feng,WANG Maoqing.Simulation of waterway traffic flow at harbor based on the ship behavior and cellular automata[C]//Artificial Intelligence & Computational Intelligence(AICI),Sanya,23-24 Oct 2010.
[14]趙勁松,王逢承,今津隼馬.船舶避碰學(xué)原理[M].大連:大連海事大學(xué)出版社,1999:543-632.
[15]劉紹滿.內(nèi)河船舶擁擠水域通過(guò)能力的研究[D].大連:大連海事大學(xué),2006.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
