船舶電力系統3相短路故障仿真
2013-09-11 01:58:08張會焱施偉鋒
上海海事大學學報 2013年3期
張會焱,施偉鋒
(上海海事大學物流工程學院,上海 201306)
0 引言
隨著船舶向超大型方向發展,其電力系統的復雜程度越來越高,尤其是全電力推進船舶的出現,使船舶電力系統容量和發電機單機容量不斷提高.[1-3]船舶電力系統的數字仿真成為其設計、調試和各種故障試驗所依賴的一種有效且經濟的手段,而船舶電力系統的建模是其系統仿真的基礎.
針對船舶電力系統的建模與仿真,國內外均有相當多的研究.王淼等[4]研究全電力推進船舶電力系統的數學模型并進行系統仿真,但沒有研究船舶電力系統故障狀態下的特性;DIAMANTIS等[5]研究船舶電力推進電機的DTC特性;ARENDT[6]建立的船舶電力系統仿真模型考慮柴油發電機的特性、軸模型、變螺距模型;陸金銘[7]對船舶推進裝置進行仿真研究;夏永明[8]介紹的分布式船舶電站多種發電方式聯合運行仿真系統構成嵌入式物理-數學仿真;謝衛等[9]對船用多相無刷直流推進電動機進行分析建模與仿真;沈愛弟等[10]根據電力推進系統的特性,對推進電機運動控制、推進系統運行狀態控制和船舶電網諧波治理進行研究,設計出內河船舶電力推進系統;劉崇等[11]設計的船舶電力推進試驗平臺由發電機組、推進變頻器、推進電機、負載變頻器和負載電機組成,能夠模擬船舶電力推進試驗,是實物結合軟件的模擬仿真;劉昭等[12]設計異步電動機模擬負載能量回饋方式的交流傳動試驗平臺,為港航領域大功率交流傳動系統的研制開發提供試驗環境,這是硬件實物方式的仿真.本文基于發電機及負載的動態特性,搭建船舶電力系統動態數字仿真平臺,并在此基礎上對船舶主推進電機3相短路故障進行仿真和分析.
1 船舶電力系統動態數字仿真平臺
本文建立的船舶電力系統動態數字仿真平臺,其模型中包含同步發電機及其勵磁系統子模型、柴油發電機組控制系統子模型、感應電動機子模型和靜態負荷子模型等.
1.1 同步發電機建模
船舶電力系統的特性很大程度上取決于同步發電機子系統的特性,船舶大功率發電機組具有頻率與電壓相互作用的特性及非線性特性.本文的船用同步發電機模型采用凸極發電機,由柴油機驅動.在船舶電力系統動態仿真中,依賴于頻率的同步電機模型是基于標準IEEE 2.1同步發電機模型發展起來的,文獻[13]給出其數學模型.
1.2 船舶柴油發電機組控制系統建模
建模考慮發電機電壓與頻率間的相互作用.系統負載變化時,發電機的電樞反應會導致發電機端電壓的變化.這一關系用隱極發電機的電壓平衡方程式描述為


式中:f為發電機頻率;N為發電機繞組匝數;Φm為發電機磁通.由式(1)和(2)可見,發電機頻率與端電壓之間存在相互關系,在控制中須予以考慮.
船舶柴油發電機組由柴油原動機、發電機、調速器和相復勵調壓裝置組成.船用柴油發電機控制系統結構框圖見圖1.轉速反饋子系統檢測發電機的轉速,勵磁反饋子系統的相復勵調壓裝置檢測發電機的端電壓和輸出電流兩個信號.轉速控制器控制油門執行器,油門執行器控制柴油機輸出相應的機械功驅動發電機旋轉,調節有功分量.勵磁機接收勵磁控制器的信號以控制發電機輸出符合要求的電壓,調節無功分量.
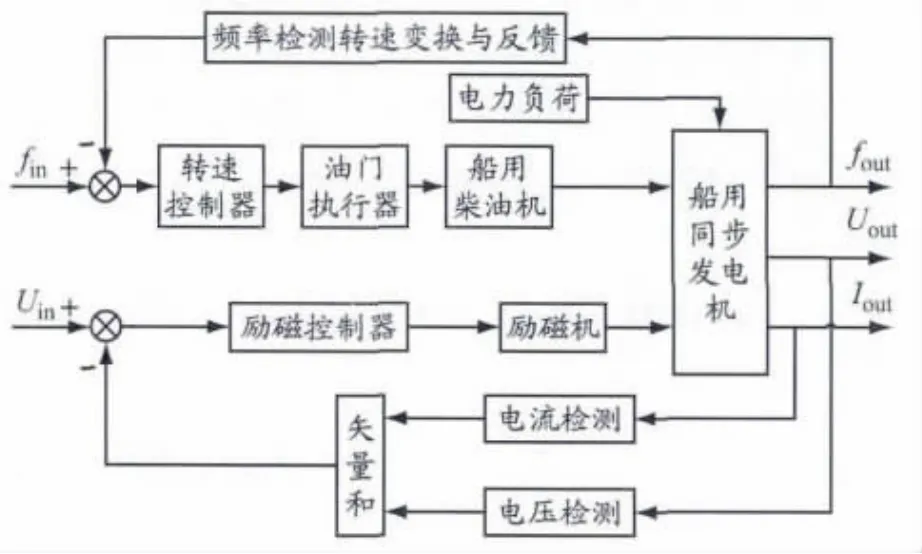
圖1 船用柴油發電機控制系統框圖
建模還考慮發電機與柴油機之間的軸轉矩模型.所建立的同步發電機組軸轉矩模型見圖2.
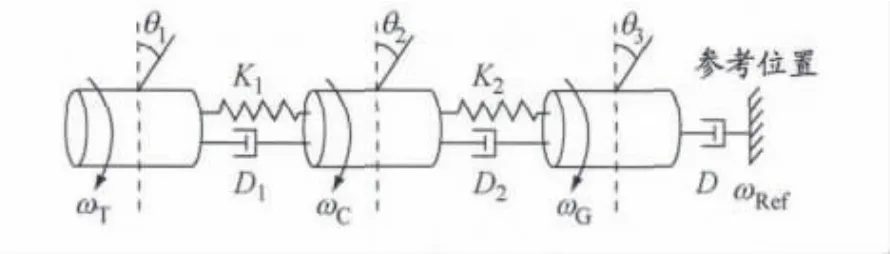
圖2 同步發電機組軸轉矩模型示意圖
柴油原動機轉動方程為

聯軸器轉動方程為

發電機轉動方程為

式(3)~(5)中:ωT為原動機轉速;ωC為聯軸器轉速;ωG為發電機轉速;ωRef為發電機參考轉速;θ1為原動機角位移;θ2為聯軸器角位移;θ3為負荷角位移;HT為原動機轉動慣量;HC為聯軸器轉動慣量;HG為發電機轉動慣量;D為發電機阻尼系數;D1為原動機與聯軸器間的阻尼系數;D2為聯軸器與發電機間的阻尼系數;K1為原動機的聯軸器間的彈性系數;K2為聯軸器與發電機間的彈性系數;TT為原動機轉矩;TG為發電機轉矩.
1.3 負載模型
船舶電力系統負載包含各種設備,如照明燈、制冷空調、電熱器、壓縮機、變壓器、感應電動機和同步電動機等,因此負荷模型的建立相當復雜.一般將負荷模型分為兩大類:靜態負荷模型和動態負荷模型.
對于靜態負荷模型,任意瞬時的負荷特性是該瞬時母線電壓幅值和頻率的代數函數.分別考慮靜態負荷模型的有功和無功功率分量.對于動態負荷模型,電動機消耗的能量占電力系統總能量的70%~80%,電動機的動態特性常常是系統負荷動態特性的最重要方面.因此,在船舶電力系統建模研究中單獨考慮電動機負載.[14-15]
1.4 感應電動機負載模型
感應電動機驅動的負載是船舶電力系統中的主要負載之一,這類負載所占比例很大,其動態特性嚴重影響電力系統的暫態過程.感應電動機的數學模型也有多種形式,本文仿真建模所用模型是依賴于頻率的動態模型,文獻[1]給出其數學模型.
1.5 船舶電力系統總體模型
綜合以上建模分析,針對某大型全電遠洋運輸船舶建立船舶電力系統模型結構,見圖3.該模型由發電機組、電網與配電屏、動態感應電動機負載及靜態負載構成.發電機的輸出轉速反饋至柴油原動機的調速器.
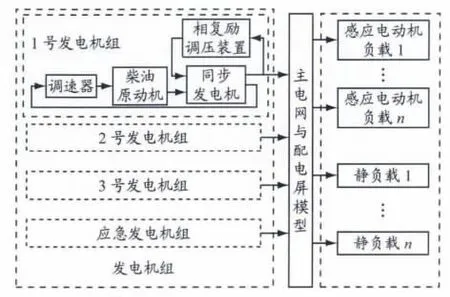
圖3 船舶電力系統模型結構
依據圖3在MATLAB/SIMULINK SimpowerSystems環境下建立船舶電力系統仿真平臺.該平臺考慮船舶電力系統各子系統的特性,特別是發電機和推進器的動態負載特性,還考慮發電機與柴油機軸傳動之間的動態特性.此仿真平臺中有3臺主船舶柴油發電機組和1臺應急柴油發電機組,每臺發電機組由同步發電機模塊、柴油機和控制系統模塊構成.船用同步發電機電氣參數及標準參數:Pn=3.125×106W,Vn=2400 V,fn=60 Hz;Rs=0.0036(pu),p=4;Xd=1.56(pu),Xd'=0.296(pu),Xd″=0.177(pu),Xq=1.06(pu),Xq'=0,Xq″=0.177(pu);Xl=0.052(pu),Td'=3.7 s,Td″=0.05 s,Tq″=0.05 s.船舶側推器由感應電機通過蝸輪蝸桿機構驅動,感應電動機電氣參數及標準參數:Pn=2200 kW,Vn=3000 V,fn=60 Hz;Rs=0.029 Ω,LIs=0.6 × 10-3H;Rr'=0.022 Ω,LIr=0.6 ×10-3H,Lm=34.6 ×10-3H.船用主推進器由感應電機驅動,電動機電氣參數及標準參數:Pn=4 MW,Vn=2400 V,fn=60 Hz;Rs=0.00859 Ω,LIs=0.5178 × 10-3H;Rr'=0.00709 Ω,LIr=0.3753 ×10-3H,Lm=10.822 ×10-3H.
2 主推進器輸入電纜3相短路故障仿真
大功率主推進器輸入電纜3相短路故障仿真如下:3臺發電機組并網穩定運行10.1 s,主推進器在10.1 s時啟動,主推進器在10.2 ~10.5 s發生輸入電纜3相短路故障,10.4 s時因短路電流過大,3臺發電機組的主開關跳閘,停止對電網供電.
主推進器輸入電纜3相短路故障時主推進器轉速、定子電流變化曲線見圖4.
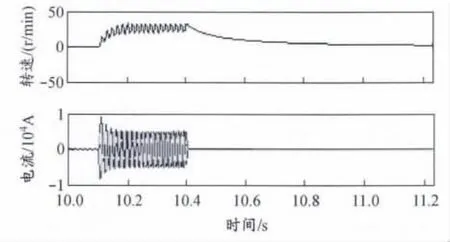
圖4 主推進器輸入電纜3相短路故障時主推進器轉速、定子電流變化曲線
由圖4可見,主推進器在10.1 s時啟動加速,10.2 s時發生3相短路故障,啟動電流大幅減少,轉速開始下降;3臺發電機組10.4 s時全部跳閘;此后主推進器定子電流變為0,轉速在10.6 s時下降至10 r/min,隨著時間的推移轉速繼續下降,最終在11.2 s時變為0.
主推進器輸入電纜3相短路故障時,3臺發電機組端電壓及母線電壓變化曲線見圖5.
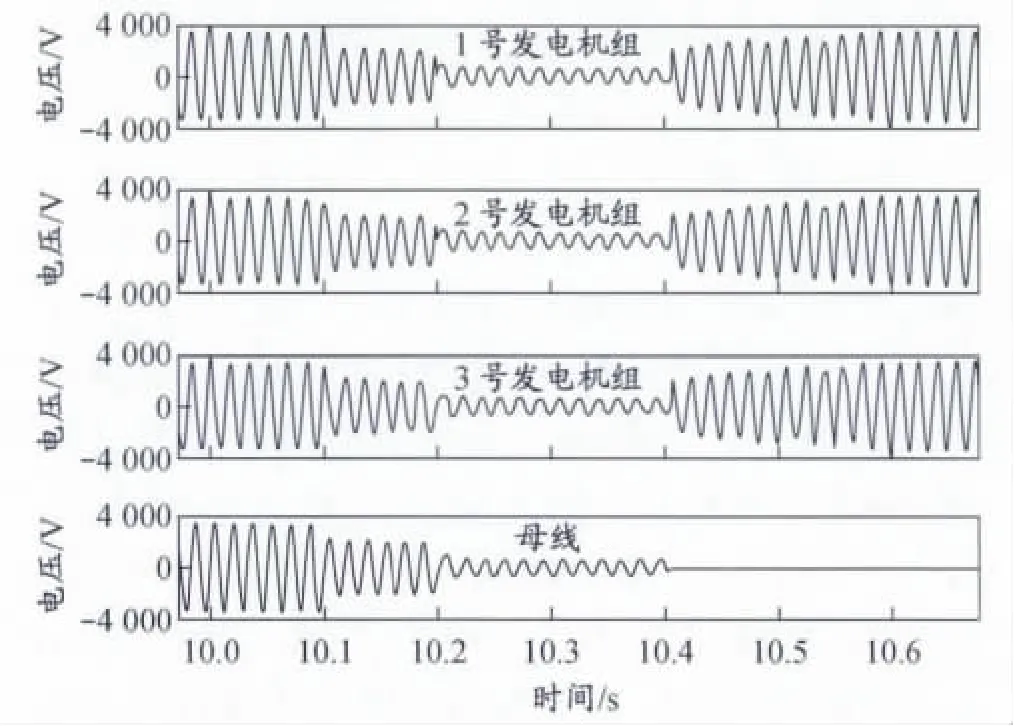
圖5 主推進器輸入電纜3相短路故障時3臺發電機組端電壓及母線電壓變化曲線
由圖5可以看出:10.1 s時大功率主推進器的啟動使得3臺發電機組端電壓及母線電壓減小到額定電壓的58%,這是由該電力系統仿真平臺中4 MW的靜態負載所致;10.1~10.2 s因主推進器啟動,電壓一開始下降較為厲害,隨后有小幅增加;10.2 s時因主推進器輸入電纜發生3相短路故障,3臺發電機組端電壓及母線電壓進一步減小;因短路電流太大,10.4 s時3臺發電機組全部跳閘,此后3臺發電機組端電壓開始逐步恢復到額定值,而母線電壓則變為0.
主推進器輸入電纜3相短路故障時,3臺發電機組及母線的a相電流變化曲線見圖6.
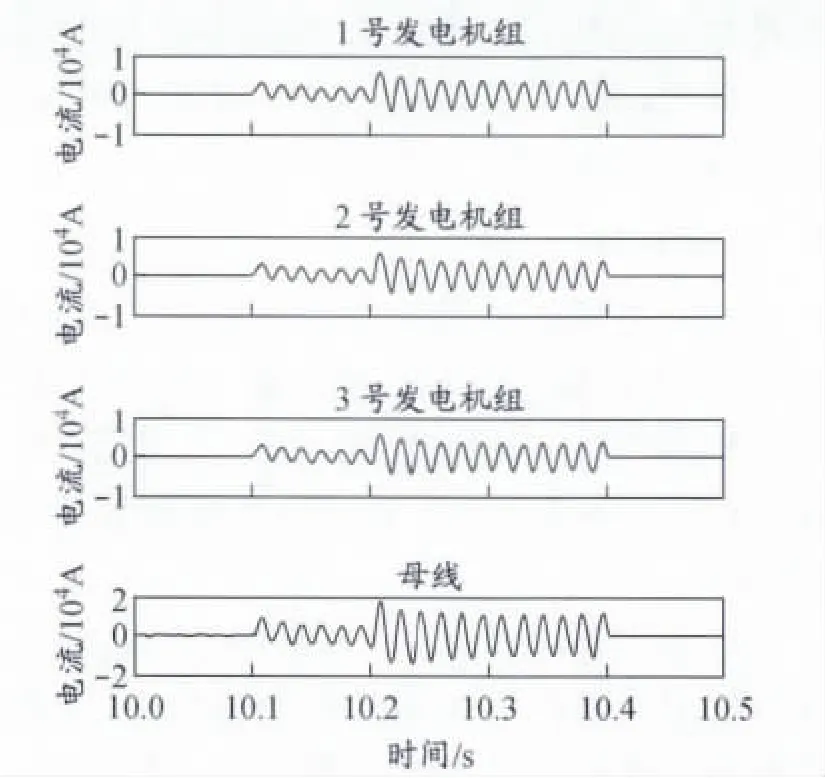
圖6 主推進器輸入電纜3相短路故障時3臺發電機組及母線的a相電流變化曲線
從圖6可以發現:10.1 s時因主推進器啟動,3臺發電機組及母線的a相電流都增加;10.2 s時因主推進器發生3相短路故障,3臺發電機組及母線的a相電流進一步增加;因短路電流太大,10.4 s時3臺發電機組的主開關跳閘,此后3臺發電機組及母線的a相電流全部變為0.
主推進器輸入電纜3相短路故障時,3臺發電機組轉矩功率、勵磁電壓、端電壓、轉速和勵磁電流曲線見圖7.仿真記錄的1,2,3號發電機組的柴油機輸出功率Pmec,轉速、勵磁系統反饋電壓Vf,端電壓Vt,勵磁電流ifd都使用標幺值 (pu).
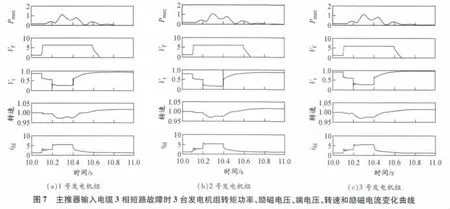
從圖7可以看出:10.1 s時因主推進器的啟動,3臺發電機組輸入的Pmec開始增加,Vf上升到飽和值,轉速有少量跌落,ifd有所增加;10.2~10.5 s因主推進器輸入電纜3相短路故障,3臺發電機組輸入的Pmec進一步增加至1后波動衰減,Vf保持在飽和值6,轉速跌落至98%,ifd增加到飽和值6;10.4 s因短路電流過大,3臺發電機組的主開關跳閘,3臺發電機組輸入的Pmec繼續波動并減小為0,Vf保持在飽和值6,轉速開始逐步回升到額定值1,ifd開始逐步減小到額定值1.可以看出,3臺參數相同的發電機組在主推進器輸入電纜3相短路故障發生的整個過程中動態變化趨勢基本一樣.
3 結束語
根據全電力推進船舶電力系統的數學模型,利用MATLAB/SIMULINK SimpowerSystems建立其動態數字仿真平臺,依托此仿真平臺對船舶電力系統進行主推進器輸入電纜3相短路故障仿真.該數字仿真平臺可以對船舶電力系統故障進行有效動態及穩態仿真模擬,為船舶電力系統的設計、測試和故障試驗提供一種有效且經濟的手段.
[1]施偉鋒,許曉彥.船舶電力系統建模與控制[M].北京:電子工業出版社,2012:23-25.
[2]湯天浩.新能源與電力電子在船舶電力推進中的發展和應用[J].上海海運學院學報,2004,25(1):19-24.
[3]馬偉明.艦船動力發展的方向——綜合電力系統[J].上海海運學院學報,2004,25(1):1-11.
[4]王淼,戴劍鋒,周雙喜,等.全電力推進船舶電力系統的數字仿真[J].電工技術學報,2006,21(4):62-67.
[5]DIAMANTIS G,PROUSALIDIS J M.Simulation of a ship propulsion system with DTC driving scheme[C]//Power Electronics,Machines and Drives.Second Int Conf,2004,2:562-567.
[6]ARENDT R.Simulation investigations of ship power systems[C]//Environment and Electrical Engineering.201110th Int Conf,2011:1-4.
[7]陸金銘.船舶推進裝置的MATLAB仿真[J].船舶工程,2002(5):38-40.
[8]夏永明.船舶電站多種發電方式的聯合運行仿真系統分布式結構的實現[J].上海海事大學學報,2005,26(4):26-32.
[9]謝衛,張霞,王亞靜,等.船用多相無刷直流推進電動機的系統建模與仿真[J].上海海事大學學報,2006,27(1):1-4.
[10]沈愛弟,褚建新,康偉.內河船舶電力推進系統設計[J].上海海事大學學報,2009,30(2):20-24.
[11]劉崇,沈愛弟,康偉.船舶電力推進試驗平臺設計[J].上海海事大學學報,2011,32(2):52-55.
[12]劉昭,高迪駒.異步電動機的交流傳動試驗平臺[J].上海海事大學學報,2010,31(2):40-44.
[13]KRAUSE P C.Analysis of electric machinery:Section 12.5[M].McGraw-Hill,1986:21-24.
[14]施偉鋒.關于船舶電力系統研究的一些探索——系統建模、混沌分析與神經控制[D].上海:上海海事大學,2005.
[15]王振濱,牛立,杜寶江.船舶電力推進系統仿真與試驗平臺[J].系統仿真學報,2008,20(9):2316-2322.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
電力工程技術(2014年1期)2014-03-20 14:19:06
