變速器疲勞壽命試驗(yàn)臺油溫控制系統(tǒng)設(shè)計(jì)與仿真
2013-09-18 02:20:16米林,王冉,譚偉
重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)) 2013年11期
關(guān)鍵詞:系統(tǒng)
米 林,王 冉,譚 偉
(重慶理工大學(xué)汽車零部件制造及檢測技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,重慶 400054)
變速器疲勞壽命試驗(yàn)是檢測變速器性能必不可少的方式。在長時(shí)間的疲勞壽命試驗(yàn)過程中,若無法保持變速器油溫的穩(wěn)定而導(dǎo)致油液的黏度、潤滑性及耐磨性未處于最佳狀態(tài),將會造成各個(gè)部位的潤滑油膜的破壞,從而加重部件的磨損,進(jìn)而導(dǎo)致部件的過早老化及失效。變速器各部件材料膨脹系數(shù)不同,構(gòu)成的運(yùn)動(dòng)副之間的間隙會發(fā)生變化,造成油液泄漏,加重或產(chǎn)生各機(jī)械部件之間的卡死現(xiàn)象[1]。為使變速器的疲勞壽命試驗(yàn)所獲得的試驗(yàn)數(shù)據(jù)能準(zhǔn)確反映變速器的實(shí)際性能,有必要為變速器疲勞壽命試驗(yàn)臺設(shè)計(jì)一套油溫控制系統(tǒng)。
該試驗(yàn)臺要求試驗(yàn)油溫小于等于120℃,變速器的正常工作溫度范圍是80~90℃,控制精度為±5℃。常規(guī)PID控制在工業(yè)控制中的應(yīng)用較為廣泛,但PID控制中比例、積分、微分3個(gè)基本參數(shù)在整定、調(diào)試完成后將無法改變,對于非線性系統(tǒng)則無法達(dá)到預(yù)期的控制效果;而純模糊控制雖然可以很好地解決非線性系統(tǒng)實(shí)時(shí)控制的要求,但容易產(chǎn)生系統(tǒng)波動(dòng),造成一定的穩(wěn)態(tài)誤差[1-2]。本文結(jié)合常規(guī)PID和模糊控制2種控制算法,設(shè)計(jì)了基于自適應(yīng)模糊PID控制器的控制系統(tǒng),實(shí)現(xiàn)了用模糊推理的方法對3個(gè)PID控制參數(shù)進(jìn)行在線自整定的功能。最后結(jié)合Simulink和Matlab中的Fuzzy Logic控制器對3種控制器進(jìn)行了建模和仿真對比試驗(yàn),驗(yàn)證了自適應(yīng)模糊PID控制的有效性和可靠性。
1 油溫控制方案
傳統(tǒng)試驗(yàn)臺油溫冷卻系統(tǒng)的制冷方式一般有風(fēng)冷式和水冷式2種。風(fēng)冷主要使用在發(fā)熱量不是很大的情況下,在回油口安裝風(fēng)機(jī)抽出熱量;水冷方式主要使用在發(fā)熱量較大的情況下。本文研究的變速器疲勞壽命試驗(yàn)臺試驗(yàn)油溫發(fā)熱量較大,采用水冷方式的制冷效果較好[2]。該溫度控制方案滿足試驗(yàn)臺對溫度控制系統(tǒng)的控制范圍和精度的要求,且同時(shí)具備溫控報(bào)警系統(tǒng)。油溫控制部分采用熱交換器調(diào)節(jié)控制變速器油液溫度的控制方式,具體控制方案如圖1所示。該系統(tǒng)的主要裝置有油泵、電磁閥、控制器、熱交換器、溫度傳感器等。當(dāng)安裝在變速器內(nèi)的溫度傳感器測得的溫度大于或小于系統(tǒng)要求的溫度值時(shí),電子控制系統(tǒng)ECU即時(shí)發(fā)出控制指令,調(diào)節(jié)執(zhí)行器即電磁閥的開啟和關(guān)閉時(shí)間來改變冷卻水流量,以此改變油液溫度,達(dá)到控制油溫的目的。

圖1 油溫控制方案
在該控制系統(tǒng)的控制核心ECU的設(shè)計(jì)中,控制器的設(shè)計(jì)最為關(guān)鍵。控制器對電磁閥開啟時(shí)間和關(guān)閉時(shí)間的精確控制將直接影響到溫控系統(tǒng)的控制精度。目前變速器疲勞壽命試驗(yàn)臺所采用的控制器主要為PID控制、模糊控制以及自適應(yīng)模糊PID控制3種。本文的試驗(yàn)臺油溫控制具有明顯的非線性和滯后性,且當(dāng)工況改變時(shí),試驗(yàn)臺油液溫度的控制更為復(fù)雜。
2 油溫控制系統(tǒng)自適應(yīng)模糊PID控制器設(shè)計(jì)
2.1 自適應(yīng)模糊PID控制器控制原理及結(jié)構(gòu)
自適應(yīng)模糊PID是在傳統(tǒng)PID控制器的基礎(chǔ)上結(jié)合模糊控制的控制算法。它以誤差e和誤差變化率ec作為輸入,PID控制器的3個(gè)修正參數(shù)ΔKp、ΔKi、ΔKd作為輸出,通過模糊推理系統(tǒng)實(shí)現(xiàn)實(shí)時(shí)在線修正PID的3個(gè)參數(shù)Kp、Ki、Kd的功能。自適應(yīng)模糊控制器控制原理如圖2所示[3]。

圖2 自適應(yīng)模糊控制器控制原理
本文中的系統(tǒng)設(shè)計(jì)為二維模糊控制器,以溫度變化量e及其變化率ec作為輸入,PID的3個(gè)控制參數(shù)ΔKp、ΔKi、ΔKd作為輸出。自適應(yīng)模糊PID參數(shù)量化見表 1。參數(shù) e、ec、ΔKp、ΔKi、ΔKd的隸屬度函數(shù)如圖3所示。

表1 自適應(yīng)模糊PID參數(shù)量化表

圖3 參數(shù) e,ec,ΔKP、ΔKi、ΔKd的隸屬度函數(shù)
從系統(tǒng)的穩(wěn)定性、響應(yīng)速度、超調(diào)量和穩(wěn)態(tài)精度4個(gè)方面考慮,Kp、Ki、Kd3個(gè)參數(shù)的作用分別為:比例系數(shù)Kp可以加快系統(tǒng)的響應(yīng)速度,提高調(diào)節(jié)精度;Ki用于消除系統(tǒng)的穩(wěn)態(tài)誤差;Kd則用于改善系統(tǒng)的動(dòng)態(tài)特性。通過模糊推理對這3個(gè)參數(shù)進(jìn)行調(diào)節(jié)需要考慮不同時(shí)刻3者之間的相互關(guān)系和對系統(tǒng)產(chǎn)生的影響。根據(jù)工程經(jīng)驗(yàn),此試驗(yàn)臺油溫控制系統(tǒng)對模糊PID 3個(gè)參數(shù)ΔKp、ΔKi、ΔKd的整定規(guī)則如下:
2.2 自適應(yīng)模糊PID控制器設(shè)計(jì)
根據(jù)以上所述的控制原理及整定規(guī)則,得出ΔKP、ΔKi、ΔKd的控制規(guī)則,如表2 ~4 所示。

表2 ΔKp模糊控制規(guī)則

表3 ΔKi模糊控制規(guī)則

表4 ΔKd模糊控制規(guī)則
3 自適應(yīng)模糊PID控制系統(tǒng)仿真
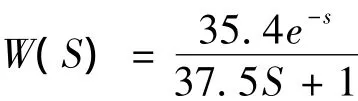
變速器試驗(yàn)臺要求試驗(yàn)油溫小于等于120℃。變速器的正常工作溫度范圍是80~90℃,控制精度為±5℃,被控對象功率約為10 kW。根據(jù)階躍響應(yīng)輸出得出其動(dòng)態(tài)特性,該系統(tǒng)具有較大的滯后性和慣性,經(jīng)最小二乘法辨識屬于一階延遲系統(tǒng)。控制對象的參考模型為[1]
3.1 PID控制系統(tǒng)仿真分析
設(shè)計(jì)PID控制器,通過對PID控制各個(gè)參數(shù)的不斷修正調(diào)節(jié),得到最佳仿真曲線。此時(shí),KP=30,Ki=0.4,Kd=1。在 Simulink 模塊搭建基于PID控制器的控制系統(tǒng)模型如圖4所示。其中階躍信號設(shè)置為控制目標(biāo)值85℃,系統(tǒng)滯后時(shí)間為1 s。圖5為PID控制仿真曲線。

圖4 PID控制系統(tǒng)仿真模型

圖5 PID控制仿真曲線
如圖5所示:0~1 s為油溫控制延遲階段;1~3 s,變速器試驗(yàn)臺開始工作時(shí),油溫迅速上升,超出油溫允許的工作范圍 80~90℃。系統(tǒng)采用PID控制器,可將油溫控制在80~90℃之間。PID控制算法簡單且有一定的控制精度,但是在變速器疲勞壽命試驗(yàn)臺溫控系統(tǒng)中,由于整個(gè)系統(tǒng)運(yùn)行時(shí)間較長、能量損耗較大、被控對象的非線性較為明顯等原因,使得原本精確的PID參數(shù)失去意義,KP、Ki、Kd等參數(shù)需要重新進(jìn)行調(diào)節(jié),調(diào)試過程較為復(fù)雜,不利于保證整個(gè)系統(tǒng)的穩(wěn)定性。
3.2 模糊控制系統(tǒng)仿真分析
設(shè)計(jì)二維模糊控制器輸入為油溫誤差e及誤差變化率ec,輸出為電磁閥開啟時(shí)間u。e、ec、u的基本論域分別為[-30,+30]、[-24,+24]、[-36,+36],并且設(shè)模糊論域?yàn)椋郏?,+6],可得誤差e、誤差變化率ec及電磁閥開啟時(shí)間u三個(gè)參數(shù)的量化因子為 Ke=0.2、Kec=0.25、Ku=6。在Simulink中利用模糊控制器搭建變速器試驗(yàn)臺油溫模糊控制系統(tǒng)模型如圖6所示。圖7為模糊控制仿真曲線。

圖6 模糊控制系統(tǒng)仿真模型
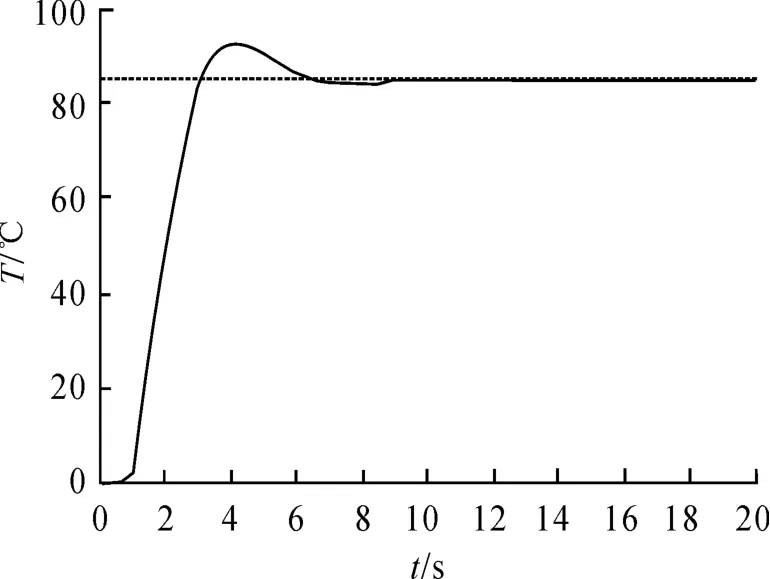
圖7 模糊控制仿真曲線
通過圖7與圖5的仿真曲線對比可以看出模糊控制器能更快達(dá)到穩(wěn)態(tài)值,但控制系統(tǒng)容易產(chǎn)生系統(tǒng)波動(dòng),出現(xiàn)穩(wěn)態(tài)誤差。
3.3 自適應(yīng)模糊PID控制系統(tǒng)仿真分析
通過本文設(shè)計(jì)的模糊PID控制器,在Simulink中對Fuzzy Logic控制器進(jìn)行設(shè)置,搭建的變速器試驗(yàn)臺油溫自適應(yīng)模糊PID控制系統(tǒng)模型如圖8所示,得到自適應(yīng)模糊PID控制器的油溫控制系統(tǒng)仿真曲線如圖9所示。
由系統(tǒng)的仿真結(jié)果可以看出:自適應(yīng)模糊PID控制系統(tǒng)的控制精度較高,超調(diào)量很小,達(dá)到穩(wěn)態(tài)狀態(tài)所需時(shí)間更短,且穩(wěn)態(tài)誤差幾乎為零。

圖8 自適應(yīng)模糊PID控制系統(tǒng)仿真模型

圖9 自適應(yīng)模糊PID控制仿真曲線
3.4 控制系統(tǒng)抗干擾性分析
在長時(shí)間的變速器疲勞壽命試驗(yàn)過程中,試驗(yàn)臺溫控系統(tǒng)會受到各種各樣的干擾信號的影響。為了驗(yàn)證控制系統(tǒng)的控制特性,評價(jià)控制系統(tǒng)的性能,有必要對該溫控系統(tǒng)的抗干擾能力進(jìn)行仿真分析[4-10]。根據(jù)工程實(shí)踐經(jīng)驗(yàn),10 s時(shí)自適應(yīng)模糊PID控制器施加一個(gè)瞬時(shí)信號作為干擾信號,系統(tǒng)加干擾的仿真模型和仿真曲線如圖10和11所示。
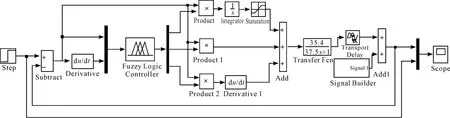
圖10 加干擾的模糊PID控制系統(tǒng)模型
由圖11的仿真運(yùn)行結(jié)果可知:系統(tǒng)在干擾信號下產(chǎn)生波動(dòng);當(dāng)干擾消失時(shí),信號雖然產(chǎn)生了一定的波動(dòng),但波動(dòng)較小且很快調(diào)節(jié)至趨于穩(wěn)態(tài),恢復(fù)到理想調(diào)節(jié)狀態(tài)。這說明模糊PID控制系統(tǒng)具有很高的抗干擾能力和魯棒性。
通過以上對各個(gè)控制系統(tǒng)的分析發(fā)現(xiàn):模糊PID控制器構(gòu)成的油溫控制系統(tǒng)在控制系統(tǒng)的靈活性及穩(wěn)定性方面相比PID控制和模糊控制均具有較大的優(yōu)勢,系統(tǒng)超調(diào)量和穩(wěn)態(tài)誤差較小,抗干擾能力較強(qiáng),系統(tǒng)調(diào)試工作更加簡單。
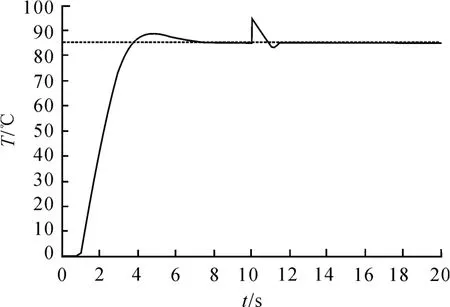
圖11 加干擾的模糊PID控制仿真曲線
4 結(jié)束語
本文設(shè)計(jì)了自適應(yīng)模糊PID控制器的變速器疲勞壽命試驗(yàn)臺油溫控制系統(tǒng),著重研究了基于模糊推理算法的模糊PID控制器,利用Matlab/Simulink仿真平臺建立了傳統(tǒng)PID、模糊和自適應(yīng)模糊PID 3種控制器的控制仿真模型,最后對系統(tǒng)的抗干擾性進(jìn)行了仿真分析。分析結(jié)果表明:基于自適應(yīng)模糊PID控制的油溫控制系統(tǒng)兼有傳統(tǒng)PID控制系統(tǒng)和模糊控制系統(tǒng)的優(yōu)點(diǎn),彌補(bǔ)了這2種控制方式無法在線修正參數(shù)和穩(wěn)態(tài)誤差較大的缺陷,提高了溫度控制的精度,具有極強(qiáng)的魯棒性及適應(yīng)能力,為變速器疲勞壽命試驗(yàn)提供了有力保障。
[1]趙戈.傳動(dòng)系試驗(yàn)臺油溫控制系統(tǒng)開發(fā)[D].長春:吉林大學(xué),2005.
[2]尚超,王新民,王紀(jì)森.液壓試驗(yàn)臺油溫的模糊控制[J].機(jī)床與液壓,2012,38(9):60 -62.
[3]科瓦稀奇,波格丹.模糊控制器設(shè)計(jì)理論與應(yīng)用[M].胡玉玲,譯.北京:機(jī)械工業(yè)出版社,2010.
[4]Jan Jantzen.Tuning Of Fuzzy PID Controllers[J].IEEE,1996,15(3):20 -25.
[5]Jen-Yang Chen.Rule Regulation of Fuzzy Sliding Mode Controller Design:Direct Adaptive Approach.Fuzzy Sets and Systems[J].IEEE,2001,120:159 -168.
[6]曾光奇,胡均安,王東,劉春玲.模糊控制理論與工程應(yīng)用[M].武漢:華中科技大學(xué)出版社,2006.
[7]陳超,龔國芳,徐曉東,等.參數(shù)自整定模糊PID控制器在大型液壓源溫控系統(tǒng)中的應(yīng)用[J].機(jī)床與液壓,2008,36(4):105 -107.
[8]王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機(jī)械科學(xué)與技術(shù),2011,30(1):166 -172.
[9]馮斌,龔國芳,楊華勇.大流量液壓系統(tǒng)的油溫控制[J].浙江大學(xué)學(xué)報(bào):工學(xué)版,2011,45(4):741 -746.
[10]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學(xué)出版社;北京交通大學(xué)出版社,2008.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32