基于動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制
2013-09-25 01:49:36頡炯
電氣傳動(dòng)自動(dòng)化 2013年5期
頡 炯
(天水電氣傳動(dòng)研究所有限責(zé)任公司,甘肅天水 741020)
1 引言
由于實(shí)際系統(tǒng)中總是存在參數(shù)的變化和外界干擾,這些不確定項(xiàng)的存在會(huì)對(duì)實(shí)際的控制系統(tǒng)產(chǎn)生影響,有時(shí)甚至?xí)箍刂葡到y(tǒng)發(fā)散,因此設(shè)計(jì)控制系統(tǒng)時(shí)要考慮其魯棒性[1]。
直接逆模型控制[2-3]是一種簡(jiǎn)單有效的控制器設(shè)計(jì)方法,使用被控對(duì)象傳遞函數(shù)的逆模型作為串行控制器來(lái)開環(huán)控制系統(tǒng)的動(dòng)態(tài)性能。文獻(xiàn)[2]采用最小二乘支持向量機(jī)(Least Square Support Vector Machine,LS-SVM)對(duì)系統(tǒng)進(jìn)行逆建模,將逆模型作為串行控制器對(duì)被控系統(tǒng)進(jìn)行開環(huán)控制,并對(duì)幾種典型信號(hào)進(jìn)行了跟蹤仿真,但文中未考慮系統(tǒng)的參數(shù)變化和外界干擾。文獻(xiàn)[3]針對(duì)開環(huán)逆控制,在核函數(shù)為L(zhǎng)ipschitz的條件下,證明了LS-SVM逆控制器是有限增益穩(wěn)定的,但文中也未涉及到系統(tǒng)發(fā)生參數(shù)變化和存在外界干擾時(shí)的穩(wěn)定性問題。因此當(dāng)系統(tǒng)參數(shù)變化和存在外界干擾時(shí)如何提高直接逆控制器的魯棒性以及如何盡可能準(zhǔn)確地構(gòu)造被控對(duì)象的逆模型成為直接逆控制需要解決的關(guān)鍵問題。支持向量機(jī)是一種基于結(jié)構(gòu)風(fēng)險(xiǎn)最小化的機(jī)器學(xué)習(xí)算法,可以逼近任意一類非線性函數(shù)。而最小二乘支持向量機(jī)是采用二次規(guī)劃方法解決函數(shù)估計(jì)問題的方法。該方法計(jì)算簡(jiǎn)單,收斂速度快,精度高,在函數(shù)估計(jì)和控制中得到廣泛應(yīng)用[4-8],為逆系統(tǒng)控制方法中構(gòu)造逆系統(tǒng)模型提供了理論依據(jù)。
基于此本文引入LS-SVM離線建立被控系統(tǒng)的逆建模,并借助無(wú)模型自適應(yīng)控制思想[9-10],設(shè)計(jì)一個(gè)補(bǔ)償控制器,作為系統(tǒng)參數(shù)發(fā)生變化時(shí)的逆模型控制的補(bǔ)償控制,同時(shí)引入系統(tǒng)控制誤差ε不敏感函數(shù),當(dāng)系統(tǒng)控制誤差超出不敏感區(qū)域時(shí),利用增量算法對(duì)逆模型進(jìn)行在線修正,提高控制精度。仿真結(jié)果表明文中所提方法能有效地增強(qiáng)控制器的魯棒性和控制精度。
2 最小二乘支持向量機(jī)
2.1 批量LS-SVM函數(shù)估計(jì)算法

其中:w為權(quán)向量,β為偏移量。
在LS-SVM中,目標(biāo)函數(shù)描述為:

式中:J為優(yōu)化目標(biāo)函數(shù);γ為正則化參數(shù);ek為誤差變量。
約束條件yk=wT·φ(xk)+β+ek(k=1,2…N),定義拉格朗日函數(shù)為:

式中:αk為拉格朗日乘子,根據(jù)Karush-Kuhn-Tucker(KKT)最優(yōu)條件[7]:


從而求解的優(yōu)化問題轉(zhuǎn)化為求解線性方程組問題

式中:α=[α1,…,αN]T,1=[1,…,1]T,y=[y1,… yN]T,I為N×N辨識(shí)矩陣,Ω為核矩陣,Ωij=K(xi,yj),K為定義的核函數(shù)。
將式(4)簡(jiǎn)化為:

選擇滿足Mercer條件的核函數(shù)

本文中核函數(shù)選取徑向基函數(shù)

式中:σ為一正的實(shí)常數(shù),表示核寬度。
非線性回歸函數(shù)就可以表示為:
2.2 LS-SVM增量算法
令(xN+1,yN+1)為一組新的訓(xùn)練數(shù)據(jù),由式(5)得原模型與新模型的增量關(guān)系為:

式中:

其中:c=γ-1+φN+1φN+1a =[1 φ1φN+1φ2φN+1… φNφN+1]
由矩陣逆定理可得:

式(8)可減少求解大規(guī)模逆矩陣的時(shí)間。
3 基于動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制
3.1 LS-SVM逆控制
考慮SISO非線性離散系統(tǒng)
y(k+1)=f[y(k),…,y(k-n),u(k),…,u(k-m)](9)式中:u(k)、y(k)分別為輸入、輸出量,則 u(k)的顯示表達(dá)式為:

令參考輸入φ(k)=y(tǒng)(k+1),則式(10)可以表示為:

由于式(10)在工程實(shí)際中常常難以確切描述,本文擬采用LS-SVM逼近系統(tǒng)(9)的逆模型,即式(11)的逼近式。可以表示為:


其中 u-=[u(k-1),u(k-2),…,u(k-m)]
y-=[y(k-1),y(k-2),…,y(k-n)]
y+=[y(k+1),y(k)]
通過LS-SVM學(xué)習(xí),利用已知數(shù)據(jù)建立系統(tǒng)的逆模型,其結(jié)構(gòu)如圖1所示。

圖1 基于LS-SVM的逆模型
3.2 無(wú)模型自適應(yīng)控制方法
無(wú)模型自適應(yīng)控制方法(MFAC)中控制器的設(shè)計(jì)不需要受控過程的數(shù)學(xué)模型結(jié)構(gòu)及辯識(shí)過程,不需要針對(duì)某個(gè)特定的受控對(duì)象進(jìn)行控制器設(shè)計(jì),也無(wú)需對(duì)控制器參數(shù)進(jìn)行復(fù)雜的人工整定,并且有一定的系統(tǒng)穩(wěn)定性分析來(lái)保證系統(tǒng)的閉環(huán)穩(wěn)定。
本文將MFAC用于在線LS-SVM逆控制的補(bǔ)償控制,用以克服實(shí)際系統(tǒng)中時(shí)變參數(shù)攝動(dòng)或不確定。
以下給出非線性系統(tǒng)(9)基于緊格式線性化的MFAC控制方案[9]:

其中pk、ηk為步長(zhǎng)序列,且pk,ηk∈(0,2)。(k)為基于緊格式線性化的偽偏導(dǎo)數(shù)μ為關(guān)于參數(shù)估計(jì)變化量的懲罰因子;λ為權(quán)重因子,作用是限制Δu(k);ε為一個(gè)充分小的正數(shù)的初值;r(k)為參考軌跡。
從上述控制方案可以看出MFAC方法不包含系統(tǒng)辯識(shí)這個(gè)環(huán)節(jié),僅用受控系統(tǒng)的I/O數(shù)據(jù),與受控系統(tǒng)的數(shù)學(xué)模型和階數(shù)無(wú)關(guān),而且MFAC算法簡(jiǎn)單,計(jì)算量小。
3.3 基于動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制
由于參數(shù)攝動(dòng)和外界干擾的存在,可能會(huì)導(dǎo)致控制系統(tǒng)性能下降,甚至造成系統(tǒng)不穩(wěn)定。因此設(shè)計(jì)一個(gè)補(bǔ)償控制器uc(k)來(lái)改善控制系統(tǒng)的性能,修正的控制器為:

其中:um(k)為基于標(biāo)稱系統(tǒng)所設(shè)計(jì)的控制器。
在線LS-SVM逆控制即在標(biāo)稱系統(tǒng)下所設(shè)計(jì)的,式(12)是在標(biāo)稱情況下通過訓(xùn)練得出的,也可表示為:

因?yàn)镸FAC方法不包含系統(tǒng)辯識(shí)部分,僅用受控系統(tǒng)的I/O數(shù)據(jù),而且MFAC算法簡(jiǎn)單,計(jì)算量小,所以本文中的補(bǔ)償控制器uc(k)借助MFAC算法來(lái)實(shí)現(xiàn)。將MFAC改進(jìn)用于動(dòng)態(tài)補(bǔ)償?shù)乃惴ㄈ缦拢?/p>


考慮到系統(tǒng)參數(shù)的時(shí)變攝動(dòng),將系統(tǒng)實(shí)際輸出與參考輸入的誤差作為控制性能的評(píng)價(jià)指標(biāo),引入控制誤差ε不敏感函數(shù),利用增量算法對(duì)逆模型進(jìn)行在線學(xué)習(xí),減小計(jì)算的復(fù)雜度,提高實(shí)時(shí)控制性能和精度,同時(shí)提高控制器的魯棒性。基于動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制框圖如圖2所示。

圖2 基于動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制框圖
根據(jù)離線逆控制器的設(shè)計(jì),基于系統(tǒng)控制誤差的ε不敏感函數(shù)的增量算法,實(shí)現(xiàn)在線訓(xùn)練步驟如下。
步驟1初始化在線模型,即利用已知數(shù)據(jù)訓(xùn)練得到被控系統(tǒng)的離線逆模型。
步驟2設(shè)r(k+1)為下一時(shí)刻的參考輸入,由式(15)可得被控對(duì)象的控制量u(k)。由被控對(duì)象實(shí)際輸出y(k+1)和參考輸入r(k+1)得系統(tǒng)控制誤差:

步驟3根據(jù)不敏感函數(shù)確定系統(tǒng)控制誤差

步驟5 由式(6)和式(7)可得到在線模型參數(shù)αN+1更新逆模型,并作為下一時(shí)刻的初始化模型。返回步驟2。
4 仿真研究
考慮如下非線性離散系統(tǒng)

其中:a、b、c均為0.3;d(k)為外界干擾。假設(shè)系統(tǒng)的參考軌跡為:

4.1 逆系統(tǒng)模型的建立
采用LS-SVM逆系統(tǒng)建模方法對(duì)系統(tǒng)(19)離線建立其對(duì)應(yīng)的逆模型作為直接逆控制器,如圖3所示為L(zhǎng)S-SVM逆模型辨識(shí)仿真曲線。從圖3可知,LS-SVM能很好地逼近逆系統(tǒng)。

圖3 LS-SVM逆模型辨識(shí)
4.2 在線LS-SVM逆控制器和補(bǔ)償控制器的設(shè)計(jì)
為充分激勵(lì)被控系統(tǒng),控制量u取幅值為2.0的正弦信號(hào),采集300組數(shù)據(jù)進(jìn)行系統(tǒng)逆模型的建立,用交叉驗(yàn)證方法選取模型參數(shù)。將離線建好的逆模型作為逆控制器(式16)串聯(lián)在被控系統(tǒng)的前面,將系統(tǒng)實(shí)際輸出與參考輸入的誤差作為控制性能的評(píng)價(jià)指標(biāo),引入控制誤差ε不敏感函數(shù),即當(dāng)系統(tǒng)誤差超出不敏感區(qū)域時(shí),利用LSSVM增量算法對(duì)逆模型進(jìn)行在線修正,保證系統(tǒng)的控制精度。
補(bǔ)償控制器中參數(shù)的設(shè)計(jì)如下,設(shè)置步長(zhǎng)序列pk=1.9,ηk=1.9,參數(shù)估計(jì)變化量的懲罰因子μ=1,權(quán)重因子λ=2。
(1)當(dāng)采用文獻(xiàn)[2]中的控制方法時(shí),在系統(tǒng)沒有受到參數(shù)攝動(dòng)和外界干擾時(shí),對(duì)設(shè)定曲線有很好的跟蹤效果,而在t>5.0s時(shí),參數(shù)a由0.3變到0.6,輸出響應(yīng)已經(jīng)不能跟蹤設(shè)定曲線,仿真圖如圖4所示。

圖4 LS-SVM直接逆控制效果

圖5 動(dòng)態(tài)補(bǔ)償?shù)腖S-SVM逆控制效果
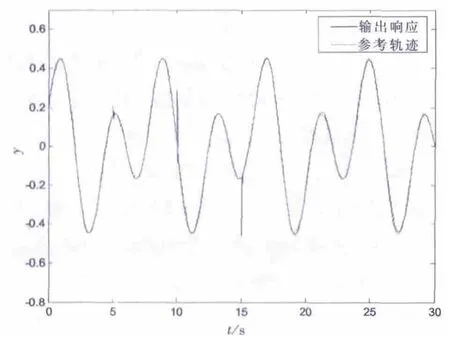
圖6 動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制效果
(2)當(dāng)采用動(dòng)態(tài)補(bǔ)償?shù)腖S-SVM逆控制方法時(shí),在 t>5.0s時(shí),數(shù)a由0.3變到0.6,系統(tǒng)響應(yīng)曲線只出現(xiàn)微小的抖動(dòng);在t>10.0s時(shí),受到外界強(qiáng)干擾d=0.2時(shí),系統(tǒng)仍能保持很好的跟蹤效果;在t>15.0s時(shí),發(fā)生a=0.3cos(0.5πt)的時(shí)變攝動(dòng)時(shí),仍具有較好的跟蹤效果,仿真圖如圖5所示。
(3)本文采用基于動(dòng)態(tài)補(bǔ)償?shù)脑诰€LS-SVM逆控制方法,當(dāng)出現(xiàn)(2)中同樣情形時(shí),控制效果更優(yōu)于(2)中的控制效果,其仿真圖如圖6所示。
由仿真圖4-6可以看出,本文所提出的方法在參數(shù)發(fā)生快時(shí)變攝動(dòng)和受到時(shí)變強(qiáng)干擾時(shí)對(duì)設(shè)定曲線仍然有理想的跟蹤效果,提高了控制器的魯棒性和系統(tǒng)跟蹤精度。
[1]楊志峰,雷虎民,董飛垚.基于LS-SVM的導(dǎo)彈在線誤差補(bǔ)償逆控制[J].系統(tǒng)工程與電子技術(shù),2010,6(32):1314-1317.
[2]胡良謀,曹克強(qiáng),李小剛.基于LS-SVM的非線性系統(tǒng)直接逆模型控制[J].中國(guó)機(jī)械工程,2010,13(13):1553-1556.
[3]劉陸洲,肖 建.基于支持向量機(jī)的逆控制及穩(wěn)定性分析[J].計(jì)算機(jī)應(yīng)用,2008,11(28):2978-2980.
[4]劉 涵,劉 丁.基于支持向量機(jī)的一類混沌系統(tǒng)自適應(yīng)逆控制[J].控制理論與應(yīng)用,2007,5(24):761-765.
[5]楊 濱,楊曉偉,黃 嵐.自適應(yīng)迭代最小二乘支持向量機(jī)回歸算法[J].電子學(xué)報(bào),2007,22(10):1170-1176.
[6]宋夫華,李 平.基于支持向量機(jī)α.階逆系統(tǒng)方法的非線性內(nèi)模控制[J].自動(dòng)化學(xué)報(bào),2007,33(7):778-781.
[7]Suykens J A K,Vandewalle J.Least Squares Support Vector MachineClassifiers[J].Neural Processing letters,1999,9(3):293-300.
[8]LI Li-Juan,SU Hong-Ye,CHU Jian.Generalized Predictive Control with Online Least Squares Support Vector Machines[J].ActaAutomaticSinica.,2007,11(33):1182-1188.
[9]侯忠生.非參數(shù)模型及其自適應(yīng)控制理論[M].北京:科學(xué)出版社,1999.
[10]侯忠生,許建新.數(shù)據(jù)驅(qū)動(dòng)控制理論及方法的回顧和展望[J].自動(dòng)化學(xué)報(bào),2009,35(6):650-667.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34