充磁導致的超高速永磁同步電機不平衡磁拉力
2013-09-30 09:29:12李艷明謝清明
北京航空航天大學學報 2013年6期
李艷明 郭 宏 謝清明 錢 浩
(北京航空航天大學 自動化科學與電氣工程學院,北京 100191)
微型燃氣輪機發(fā)電系統(tǒng)用超高速永磁同步電機的轉速高達100 000r/min,轉子結構設計和動力學分析成為電機設計的關鍵環(huán)節(jié)和技術難點[1].不平衡磁拉力直接影響超高速永磁同步電機轉子的臨界轉速和動態(tài)響應,導致轉子產(chǎn)生振動和噪聲,嚴重情況下會造成轉子掃膛而損毀電機.因此,不平衡磁拉力的研究對超高速永磁同步電機轉子的優(yōu)化設計以及微型燃氣輪機發(fā)電系統(tǒng)的安全運行均具有非常重要的意義.
產(chǎn)生不平衡磁拉力的原因較多,主要是電機磁路不對稱所致[2].現(xiàn)有文獻大多關注于轉子偏心導致的不平衡磁拉力.文獻[3-5]分別采用非線性積分法、氣隙磁密法、Fourier級數(shù)展開法等對轉子偏心引起的電機不平衡磁拉力進行了研究.文獻[6]研究了轉子偏心導致的不平衡磁拉力對電機轉子動態(tài)特性的影響.然而工程實踐表明,由轉子永磁體充磁角度偏差導致的不平衡磁拉力同樣對高速電機的可靠工作有著很大的影響.但是,對于充磁角度偏差導致的電機不平衡磁拉力的研究卻相對缺乏.
以箔片空氣軸承支承的微燃機用超高速永磁同步電機作為研究對象,本文采用有限元方法對充磁角度偏差導致的不平衡磁拉力及其作用下的空氣軸承-轉子系統(tǒng)的動力學性能進行了研究.將轉子磁芯剖為兩個半圓,分別設定其充磁方向,用以模擬轉子磁芯的充磁角度偏差.采用彈簧-阻尼單元來模擬箔片空氣軸承的特性,獲得了空氣軸承-轉子系統(tǒng)的固有頻率以及充磁偏差導致的不平衡磁拉力作用下的轉子振動特性,確定了永磁體充磁角度偏差的最大許用值,并通過試驗驗證了分析結果的正確性.
1 永磁體的充磁角度偏差
微型燃氣輪機發(fā)電系統(tǒng)用超高速永磁同步電機的最高轉速為96 000r/min,其結構如圖1所示.電機槽極比為18∶2.轉子磁芯由兩段圓柱形釤鈷永磁體粘接而成.高強度奧氏體不銹鋼制成的磁芯護套與壓氣機和透平的轉子直接相連,共同構成微燃機發(fā)電系統(tǒng)的轉子部分.轉子部分采用非機械接觸式箔片空氣軸承支承.圖2所示分別為超高速永磁同步電機工程樣機的定、轉子以及轉子磁芯.

圖1 微燃機用超高速永磁同步電機結構
采用磁場分布測試儀對同批次不同轉子樣件表面磁場分布進行測量,測量結果如圖3和表1所示.表1為圖3中兩個轉子樣件A和樣件B表面磁場N極和S極的磁密最大值及其所處的位置.

圖2 工程樣機的定子、轉子和磁芯

圖3 轉子樣件表面磁場分布測量結果

表1 轉子永磁體充磁角度偏差分析
由圖3和表1可見,由于永磁體制造和充磁工藝的限制,磁芯普遍存在充磁角度偏差的問題,且表現(xiàn)出個體差異性,具體為:
1)沿圓周方向,N極和S極的磁密最大值基本一致,但是磁極位置有偏差,最多相差可達20°;
2)沿軸線方向,同一磁芯的兩段永磁體磁極角度偏差不一致.
2 充磁導致的不平衡磁拉力
2.1 FEA模型
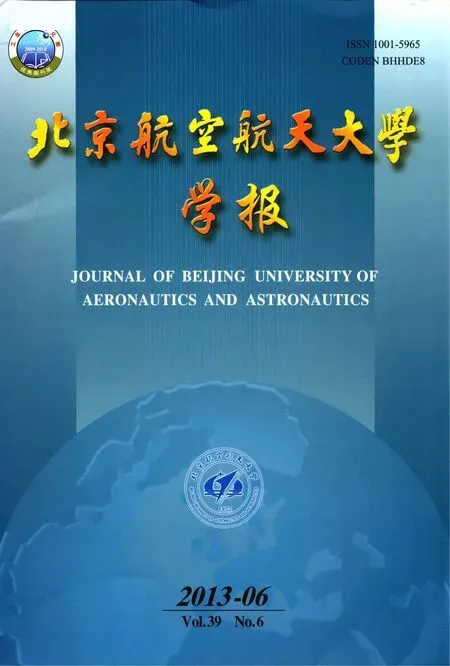
根據(jù)電機結構和材料參數(shù),采用Ansoft Maxwell 2D建立了超高速永磁體同步電機的二維時步有限元模型,如圖4所示.
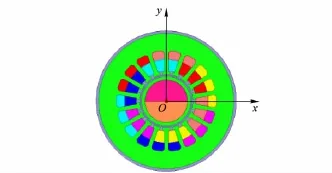
圖4 超高速永磁同步電機的二維有限元分析模型
模型中的轉子坐標系定義如圖5a所示.靜止坐標系xOy,旋轉坐標系坐標系x′Oy′和x″Oy″的原點均位于轉子圓心O上.O′為定子圓心,OO′表示轉子偏心距離l.坐標系x′Oy′隨著轉子磁芯的旋轉而旋轉,其x′軸位于轉子磁芯磁極的幾何中性線上.坐標系x″Oy″隨著轉子偏心位置的改變而改變,其x″軸指向氣隙最小的位置,與x軸的夾角表示偏心角,定義為φ.
為了模擬轉子永磁體的充磁角度偏差,將轉子磁芯剖為兩個半圓,分別設定其充磁方向(如圖5b所示),偏差角定義為α.

圖5 坐標系和轉子永磁體磁化方向定義
2.2 磁拉力計算
2.2.1 轉子無偏心、磁芯充磁角度有偏差的情況
不考慮轉子偏心,分別以充磁角度偏差角為0°,5°,10°,15°,20°的情況,分析轉子磁芯充磁角度偏差導致的不平衡磁拉力.計算結果如圖6所示.可見,由充磁角度偏差導致的電機不平衡磁拉力Fm的大小與充磁角度偏差角α基本上成正比例線性關系,力的方向始終指向-x′方向(如圖5a所示).
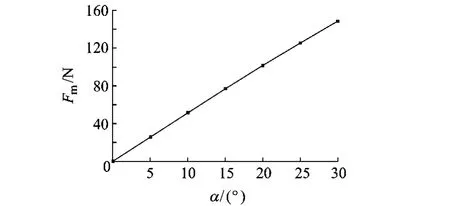
圖6 轉子無偏心時充磁角度偏差導致的不平衡磁拉力
2.2.2 轉子有偏心,且磁芯充磁角度有偏差的情況
假設轉子磁芯充磁均勻,即磁芯充磁偏差角度為0°,得到的由轉子偏心引起的不平衡磁拉力Fe與偏心距離l的關系,如圖7所示.可見,F(xiàn)e與l近似的成正比例關系,其方向是指向偏心距的方向.
圖7 充磁均勻時由轉子偏心導致的不平衡磁拉力
考慮轉子偏心時,超高速永磁同步電機的不平衡磁拉力由轉子偏心和轉子磁芯充磁角度偏差共同產(chǎn)生.如圖8所示,當轉子以轉速ω旋轉時,F(xiàn)m的方向是隨著轉子一起旋轉的,即與正x軸之間的夾角為ωt+π.而Fe的方向則總是指向氣隙最小的方向,與x軸之間的夾角為φ.

圖8 不平衡磁拉力矢量圖
將Fm和Fe分別投影到x軸和y軸,得到轉子有偏心和充磁角度有偏差時的超高速永磁同步電機不平衡磁拉力F:

由式(1)可知,若保持α和l不變,當Fm和Fe同方向時,即滿足φ-ωt=(2n-1)π時,電機的不平衡磁拉力幅值最大,為二者之和.圖9給出了不同轉子偏心距和不同充磁角度偏差時,電機不平衡磁拉力的最大幅值.可知,轉子偏心距離和充磁角度偏差角的增大都會導致電機不平衡磁拉力的增大.由于箔片空氣軸承氣膜厚度的限制,轉子偏心距離通常比較小.因此,充磁角度偏差對微燃機用超高速永磁同步電機的不平衡磁拉力的影響更大.

圖9 充磁角度偏差和轉子偏心導致的最大不平衡磁拉力
3 空氣軸承-轉子系統(tǒng)動力學分析
由于空氣軸承結構和理論的復雜性,關于箔片空氣軸承-轉子系統(tǒng)的動力學分析的文章仍然很少[7].現(xiàn)有文獻大都沒有涉及不平衡磁拉力對高速電機空氣軸承-轉子系統(tǒng)的影響[8-10].
在Ansys Workbench環(huán)境下建立了微燃機用超高速永磁同步電機空氣軸承-轉子系統(tǒng)的動力學分析模型(見圖10).采用8個彈簧-阻尼單元來模擬箔片空氣軸承,空氣軸承剛度值為2.7×106N/m.轉子護套和永磁體的材料參數(shù)如表2所示.

圖10 電機空氣軸承-轉子系統(tǒng)的動力學分析模型

表2 轉子護套和永磁體磁芯的材料參數(shù)
對建立的模型進行模態(tài)分析,求得微燃機用高速永磁同步電機空氣軸承-轉子系統(tǒng)的固有頻率如表3所示.

表3 空氣軸承-轉子系統(tǒng)的固有頻率
圖11給出了轉子的前四階模態(tài)振型.一階模態(tài)的固有頻率約等于零,其振型為軸向剛體平動,如圖11a所示.二階模態(tài)為自轉和徑向膨脹,是高速旋轉系統(tǒng)的固有特性,如圖11b所示.三階和四階模態(tài)的振型為平行于轉子軸線的單邊擺動,如圖11c和圖11d所示.五階和六階模態(tài)為錐形擺動,其固有頻率已經(jīng)超過了微燃機用超高速永磁同步電機的最高工作頻率1 600Hz.

圖11 電機空氣軸承-轉子系統(tǒng)的模態(tài)振型
利用模態(tài)分析結果,對不平衡磁拉力作用下的微燃機用超高速永磁同步電機空氣軸承-轉子系統(tǒng)進行諧響應分析.當不平衡磁拉力與重力方向一致時,轉子所受合力最大,將此合力作為施加在轉子上的載荷.系統(tǒng)阻尼系數(shù)設定為0.1N/(m·s-1).圖12給出了不同轉子磁芯充磁偏差角時轉子振幅的頻率響應曲線.

圖12 不同充磁角度偏差角時的諧響應分析結果
可見,在不同α下,轉子振幅最大值出現(xiàn)的頻率點相同,均在740Hz附近.振幅最大值隨著α的增大而增大.電機運行過程中,無論是否發(fā)生共振,如果轉子振幅超過了空氣軸承的氣膜厚度,就會引起箔片空氣軸承與轉子接觸而發(fā)生“抱軸”.因此,要想避免這一現(xiàn)象的發(fā)生,必須保證轉子發(fā)生共振時的幅值不超過空氣軸承的最小氣膜厚度.本文中,箔片空氣軸承的最小氣膜厚度為10μm.由圖12可知,只有將轉子磁芯充磁角度偏差限制在5°以內,才可保證轉子系統(tǒng)的安全運行.
在微型燃氣輪機發(fā)電系統(tǒng)調試過程中,多次出現(xiàn)轉子與空氣軸承“抱軸”現(xiàn)象,發(fā)生故障時的轉速為35 000r/min左右,相應的工作頻率為583Hz.根據(jù)圖3的測試結果,轉子磁芯充磁角度偏差最大為20°,此時,轉子在583Hz時的振幅已經(jīng)超過了10μm,因而導致了故障的發(fā)生.采取措施對轉子磁芯充磁進行嚴格控制,將充磁角度偏差角控制在5°以內,該現(xiàn)象不再發(fā)生,分析結果得到了驗證.
4 結 論
不考慮轉子偏心時,充磁角度偏差導致的電機不平衡磁拉力的大小與充磁角度偏差角近似成正比例,其方向是隨著轉子旋轉的;考慮轉子偏心時,通過矢量合成可以獲得任意充磁偏差角度和偏心距離下的電機不平衡磁拉力.由于采用箔片空氣軸承支承,充磁角度偏差對微燃機用超高速永磁同步電機的不平衡磁拉力的影響更大.不平衡磁拉力作用下的微燃機用超高速永磁同步電機空氣軸承-轉子系統(tǒng)在740Hz附近時會發(fā)生共振,其振幅隨著充磁偏差角的增大而增大.當振幅超過箔片空氣軸承的最小氣膜厚度時,會導致空氣軸承與轉子接觸而發(fā)生“抱軸”.因此,在轉子設計過程中,減小不平衡磁拉力重點應從避免轉子磁芯充磁角度偏差上采取措施,將充磁偏差角控制在5°以內,使系統(tǒng)處于穩(wěn)定,小振幅的運動狀態(tài).
(References)
[1]Hong D K,Woo B C,Lee J Y,et al.Ultra high speed motor supported by air foil bearings for air blower cooling fuel cells[J].IEEE Transactions on Magnetics,2012,48(2):871-874
[2]白暉宇,荊建平,孟光.電機不平衡磁拉力研究現(xiàn)狀與展望[J].噪聲與振動控制,2009(6):5-7
Bai Huiyu,Jing Jianping,Meng Guang.Survey and outlook on the research of the unbalanced magnetic pull in the motors[J].Noise and Vibration Control,2009(6):5-7 (in Chinese)
[3]Li Weili,Tang Li,Zhang Xiaocheng,et al.Calculation and analysis of high-speed permanent magnetic generator unilateral magnetic force[C]//International Conference on Electrical Machines and Systems.Wuhan,China:IEEE,2008:3284-3288
[4]Stol R L.Simple computational model for calculating the unbalanced magnetic pull on a two-pole turbogenerator rotor due to eccentricity[J].IEE Proceedings-Electric Power Applications,1997,144(4):263-270
[5]郭丹,何永勇,褚福磊.不平衡磁拉力及對偏心轉子系統(tǒng)振動的影響[J].工程力學,2003,20(2):116-121
Guo Dan,He Yongyong,Chu Fulei.The calculation of unbalanced magnetic pull and its effect on vibration of an eccentric rotor[J].Engineering Mechanics,2003,20(2):116-121(in Chinese)
[6]Pennacchi P,F(xiàn)rosini L.Dynamical behaviour of a three-phase generator due to unbalanced magnetic pull[J].IEE Proceedings on Electric Power Applications,2005,1524(6):1389-1400
[7]Czolczynski K.Rotordynamics of gas-lubricated journal bearing systems[M].New York:Springer,2011:1-3,50-60
[8]張廣輝,劉占生.徑向氣體軸承-柔性轉子耦合系統(tǒng)動力學研究[J].航空動力學報,2010,25(6):1417-1426
Zhang Guanghui,Liu Zhansheng.Dynamic study of journal gas bearings-flexible rotor coupling system [J].Journal of Aerospace Power,2010,25(6):1417-1426(in Chinese)
[9]Lee Y B,Park D J,Kim C H,et al.Rotordynamic characteristics of a micro turbo generator supported by air foil bearings[J].Journal of Micromechanics and Microengineering,2007(17):297-303
[10]Lee Y B,Kim T H,Kim C H.Unbalance response of a super-critical rotor supported by foil bearings—comparison with test results[J].Tribology Transactions,2004,47:54-60