分布式位置和姿態測量系統的概念與應用方向
2013-10-03 12:25:08李道京滕秀敏潘舟浩
雷達學報 2013年4期
李道京 滕秀敏 潘舟浩
①(中國科學院電子學研究所微波成像技術重點實驗室 北京 100190)
②(數據通信科學技術研究所 北京 100191)
1 引言
位置和姿態測量系統(Position and Orientation System,POS)能夠實時測量遙感設備所在的位置和方向的3個線性坐標和3個轉動坐標以及加速度,經過后處理還可得到更高精度的設備位置姿態信息。利用這些位置姿態信息對所獲取的遙感數據進行高精度的幾何校正,可大大提高遙感數據產品的質量,在補償飛行平臺姿態不穩帶來的誤差的同時,可以實現無或減少地面控制點測圖,降低數據獲取的成本并縮短制圖周期。
目前,世界上利用 POS輔助合成孔徑雷達(Synthetic Aperture Radar,SAR)和光學設備(可見光相機、成像光譜儀、激光雷達)實施遙感測量已經是非常普遍、成熟的做法,并獲得了非常好的應用效果,其典型系統如加拿大Applanix公司的POS 510和POS 610。
POS在結構上主要由慣性測量單元(Inertial Measurement Unit,IMU)單元、全球衛星導航系統(Global Navigation Satellite System,GNSS)單元和POS計算機系統(POS Computer System,PCS)單元3部分組成,使用時IMU單元通常需和SAR天線相位中心固聯或和光學遙感設備鏡頭固聯。較大體積重量的IMU單元雖具有較高的數據精度,但考慮到安裝條件,其應用也可能受到限制。為實現有效的系統集成,在保證數據精度的同時,要求IMU單元具備體積小重量輕的特點。
隨著飛行平臺技術的發展,在同一平臺上采用多觀測窗口實現多遙感設備同時觀測已成為可能,典型的如SAR、可見光相機、成像光譜儀和激光雷達同時工作,由于觀測窗口分布在非剛性平臺的不同位置,各個遙感設備的姿態穩定控制方式不同,每個遙感設備都需使用POS,并與其IMU固聯,由此需形成一個分布式的多節點POS系統。與此同時,基于分布式多子陣天線結構的成像雷達,典型的如長基線 InSAR和大型陣列天線 SAR,其信號處理也需使用子陣級的POS數據信息,也對分布式的多節點POS系統提出了需求。從系統工程的角度考慮,在飛行平臺上簡單地同時使用多個POS顯然不合理,進一步考慮到要減少POS系統的體積重量尤其是固聯在遙感設備上的IMU體積重量,分布式的多節點POS的概念和體制還需深入研究。
本文討論了分布式POS的概念和體制,論述了其主要技術指標和要求,明確了其應用方向。
2 分布式POS的概念和體制
為實現各種遙感數據融合,上述多節點分布式POS系統應具有統一的時空基準,假定定義設置在飛行平臺上的輸出時空基準信號的POS為主節點,設置在各個觀測窗遙感設備上的POS為子節點,與應用需求對應的分布式POS功能如下:
(1) 主節點采用體積重量較大的高精度 IMU,多個子節點采用體積重量較小的低精度IMU,經綜合處理在所有子節點獲得接近主節點精度的測量信息;
(2) 主子節點均采用體積重量精度相當的IMU,經綜合處理在所有節點獲得相對精度提升的測量能力。
總體看來,分布式POS應是一個以主子多節點形式在空間分布的具有多點高測量精度的位置和姿態測量系統。
3 POS的主要技術指標
典型的 POS系統如加拿大 Applanix公司的POS 510和POS 610[1],其主要技術指標和參數如表1所示。

?
目前POS 510和POS 610都獲得了廣泛的應用,和POS 510相比,POS 610具有更高的姿態測量精度,但其IMU的體積和重量較大。
4 光學設備對POS的要求
POS 5105~10 cm量級的定位精度已可滿足大部分可見光相機、成像光譜儀和激光雷達等幾類光學遙感設備的位置測量精度要求,但其 0.005°姿態測量精度,還可能制約著光學遙感設備的幾何測量精度,尤其是在觀測距離較遠時。例如,當觀測距離6 km時,0.005°姿態測量精度可導致0.52 m的幾何測量誤差,難以滿足1:5000比例尺成圖精度要求,需使用姿態測量精度更高的POS 610。一般來講,光學遙感設備對POS的姿態測量精度要求較高。
5 SAR對POS的要求
5.1 2D-SAR成像對POS的要求
POS 5105~10 cm量級的定位精度已可滿足用于 2維成像的 2D-SAR圖像定位精度要求,由于SAR的天線波束較寬,POS 0.05°~0.10°的姿態測量精度已可滿足SAR波束指向控制要求,但SAR成像處理對位置精度尤其是相對位置精度有很高的要求,通常相對位置精度需優于1/16波長[2](在合成孔徑時間內,對應的雙程相位誤差為π/4),這里的相對位置精度指在合成孔徑時間內的非線性位置誤差,在微波頻段工作的 SAR合成孔徑時間通常在10 s量級,考慮到基于IMU的POS的工作原理,合成孔徑時間越短,用POS獲得的相對位置精度越高,通常要求的相對位置精度約為 1 mm。為達到如此高的相對位置精度要求,在SAR成像處理過程中,對POS輸出的數據需要進行特殊處理[3,4]。
從成像機理看,近年提出的用于 3維成像的3D-SAR對POS相對位置精度的要求和用于2維成像的2D-SAR接近。
5.2 InSAR對POS的要求
基于一發兩收主副天線結構的InSAR高程反演公式為:

上式表明斜距r,基線長度B,基線與水平方向的夾角α,載機高度H,干涉相位Δφ,這 5個參量的測量誤差 σr,σB,σα,σH,σφ都會引起高程測量誤差。通過微分可求得這5個參量引起的高程誤差分量[5]:
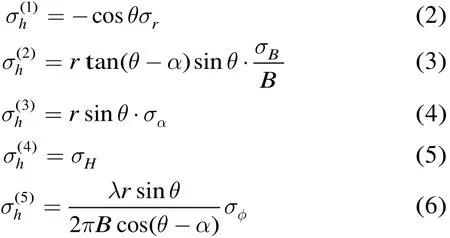
由此可以簡單估計每個參量誤差引起的高程測量誤差的大小。這里θ為天線視角,λ為SAR波長。
在實際工作中,高程測量誤差的大小主要是由相位測量誤差引起的,而相位測量誤差主要受信噪比、多視視數、圖像配準的精度、基線長度引起的去相干、2維相位解纏繞的方法等幾方面因素的影響。接收機熱噪聲無疑會對相位測量產生影響,采用多視處理在減小圖像相干斑影響的同時,也可提高相位的測量精度。
目前可同時獲取地物高程信息的InSAR分為剛性基線、柔性基線和雙站/重過航3種形式,不同形式 InSAR,對 POS的精度要求也不同,下面舉例對此進行說明。
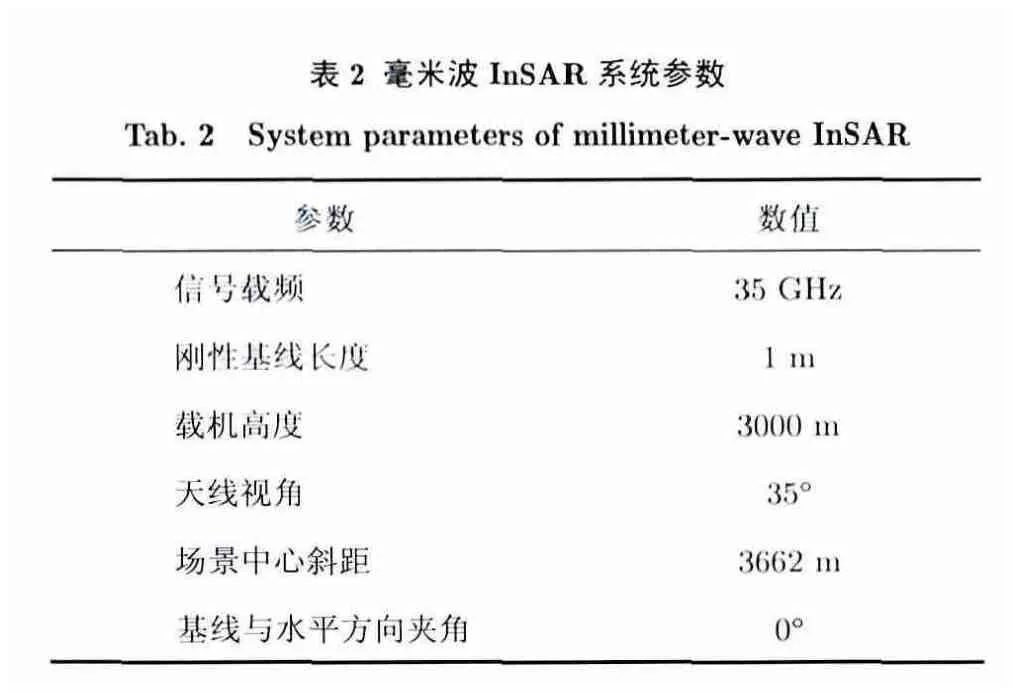
5.2.1 剛性基線毫米波 InSAR 剛性基線雙天線InSAR通常使用1個POS,其IMU安裝在主天線的相位中心處,獲取主天線相位中心的位置信息,使用 POS姿態信息的主要目的在于根據剛性基線的長度和姿態角,獲取副天線相位中心的位置。
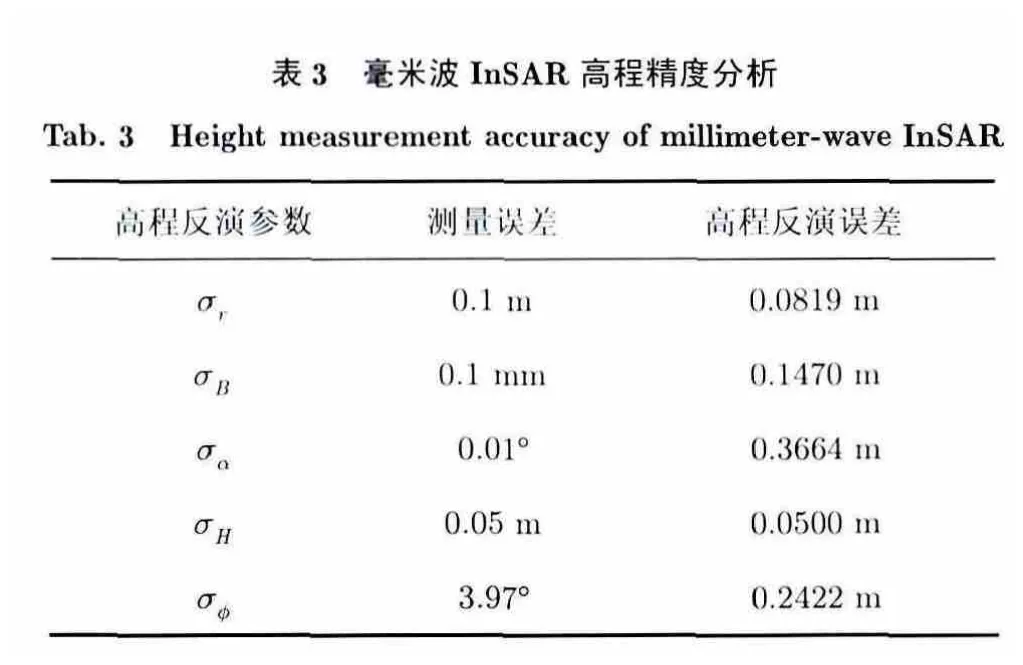
一個剛性基線毫米波InSAR系統參數和對應的高程精度分析結果[6]如表2、表3所示。
?
?
在上述參數下的高程精度為0.4730 m,可見對剛性基線InSAR,姿態測量精度是限制高程測量精度的主要因素。
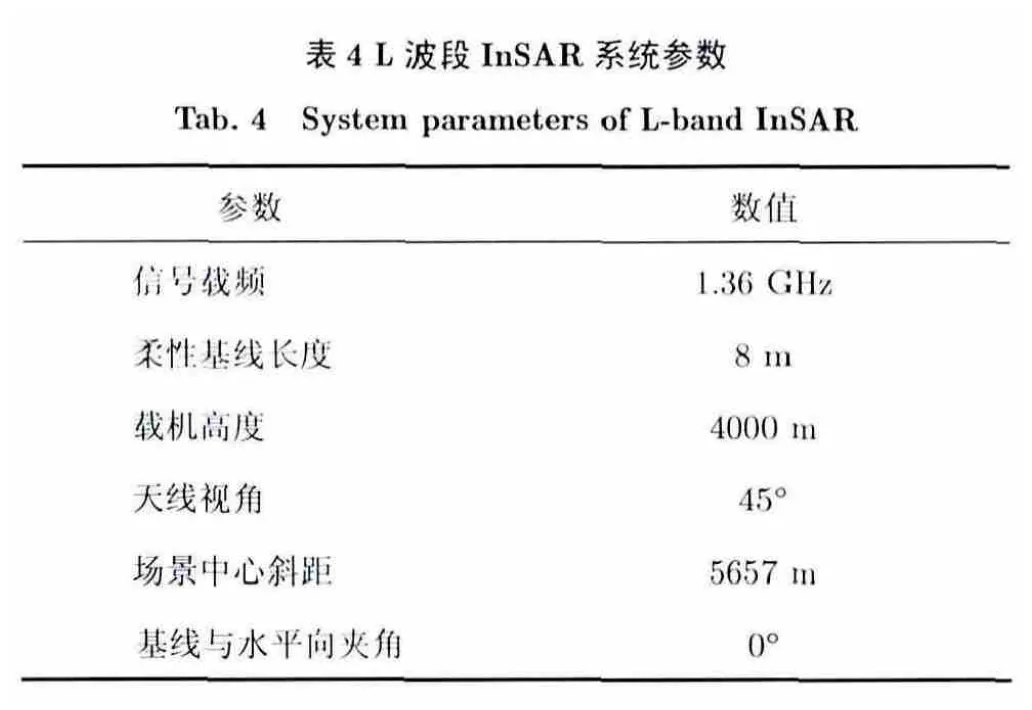
5.2.2 柔性基線L波段InSAR 雙天線InSAR的基本原理是干涉測角,為實現干涉測角,首先要解決主副兩個天線的相位中心相對位置測量問題,在此基礎上,基線是剛性還是柔性的已不重要。
對柔性基線雙天線 InSAR,可考慮采用兩個POS分別獲取兩個天線的相位中心位置,此時形成的雙POS系統,不僅是分布式POS的一個特例,而且是分布式POS的最小結構。
對柔性基線雙天線 InSAR,當 POS的位置測量精度1 mm,則基線長度測量精度為1 mm,8 m基線對應的基線傾角測量精度約為 0.007°。
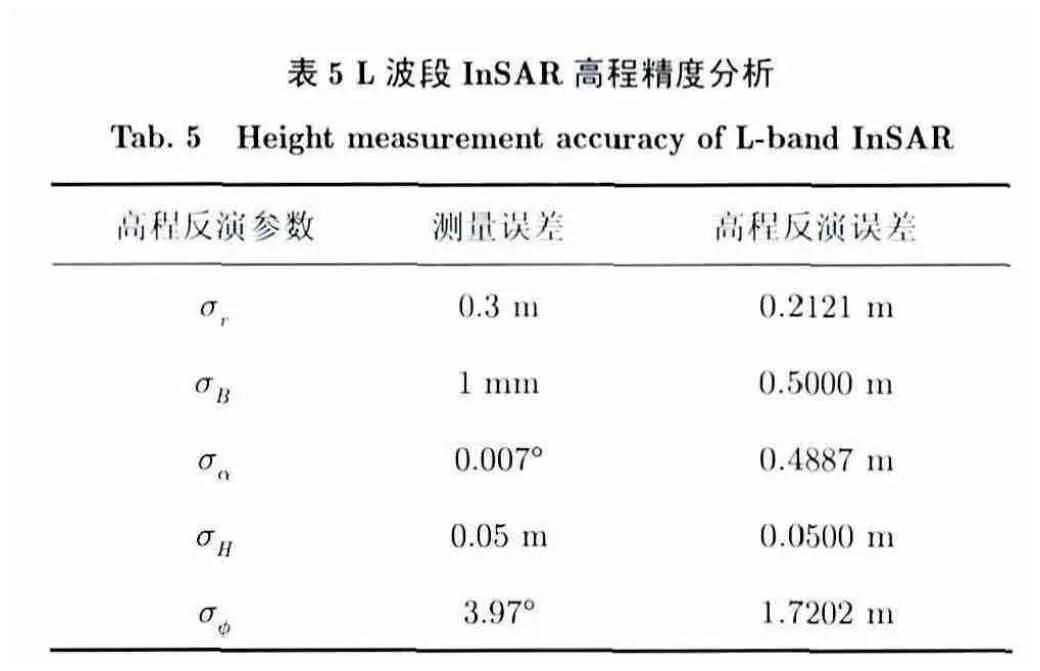
一個L波段InSAR系統參數和對應的高程精度分析結果如表4、表5所示。
?
?
在上述參數下的高程精度為 1.8696 m,假定POS能具有1 mm量級的位置測量精度,可見干涉相位的測量精度和柔性基線長度就成了影響L波段InSAR的高程精度的主要因素。
和2D-SAR要求的相對位置精度不同,此時雙天線InSAR雙POS結構下要求的位置精度應考慮線性位置誤差,故POS要獲得1 mm量級的位置測量精度并非易事,相關的問題需深入研究。
值得指出的是,由于InSAR實際上需要的是同時刻兩天線相位中心的相對位置,盡管POS的位置精度在 GPS數據間隔內具有隨著時間增加而降低的特點,若假定兩個POS的位置誤差隨時間的變化曲線一致,通過數據處理就可能獲得滿足InSAR使用要求的瞬時高精度相對基線參數。但事實上,由于POS慣性器件誤差的影響,兩個POS的位置誤差發散趨勢具有隨機性,其位置誤差隨時間變化曲線很難具有一致性,上述假定很難成立。
解決上述問題的一個思路是利用長時 GPS數據,估計每個POS的位置誤差隨時間變化曲線并對其數據實施校正。與此同時,也可考慮利用已有的撓曲形變建模補償和傳遞對準技術研究如何進一步提高測量精度問題。
5.2.3 雙站/重過航InSAR 典型代表為編隊衛星X波段InSAR系統,目前主要采用差分GPS信號獲得天線相位中心的空間位置。當位置測量精度5 cm時,基線長度測量精度為5 cm,1000 m基線對應的基線傾角測量精度約為0.0029°。
一個編隊衛星X波段InSAR系統參數和對應的高程精度分析結果如表6、表7所示。
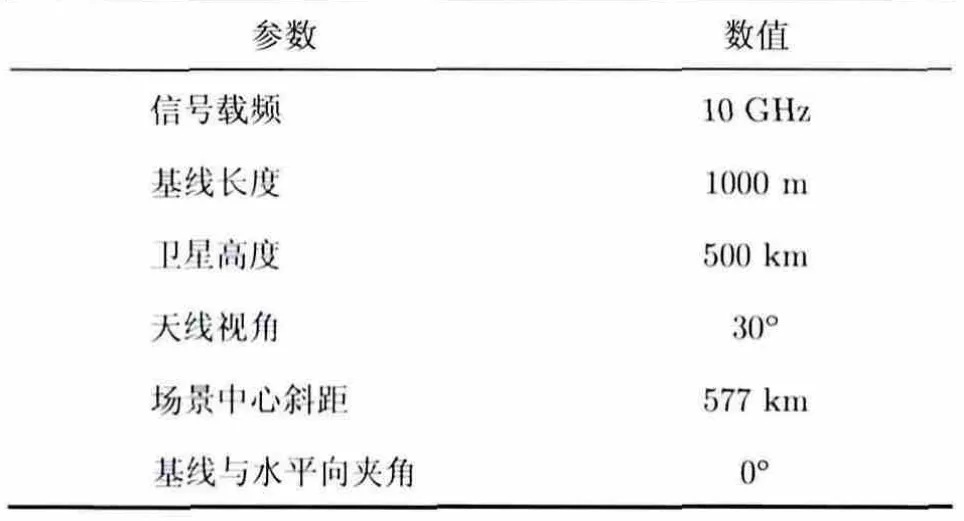
表6 編隊衛星X波段InSAR系統參數Tab.6 System parameters of X-band InSAR satellites flying in formation
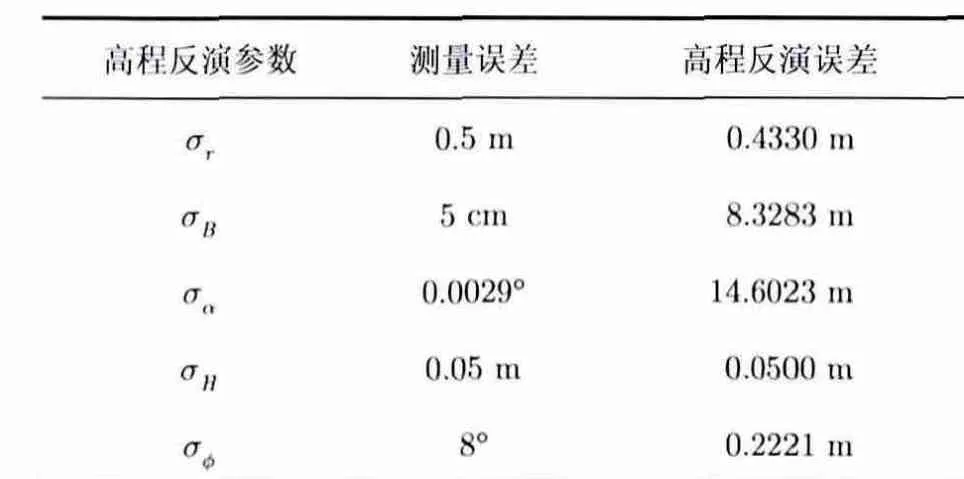
表7 編隊衛星X波段InSAR高程精度分析Tab.7 Height measurement accuracy of X-band InSAR satellites flying in formation
在上述參數下的高程精度為16.8174 m。較長的基線有可能獲得較高的高程測量精度,但長基線會導致圖像的去相干,故進一步提高天線相位中心的位置測量精度具有重要的意義。假定由 POS提供的天線相位中心相對位置精度可達到 1 cm,系統的高程測量精度可達到3.3975 m。
6 分布式POS的應用方向
6.1 多光學載荷遙感飛機
● 主子節點數:3~4個
● 空間分布:10~30 m
● 姿態測量精度:0.0025°~0.005°
多光學載荷遙感飛機工作示意圖如圖1所示。
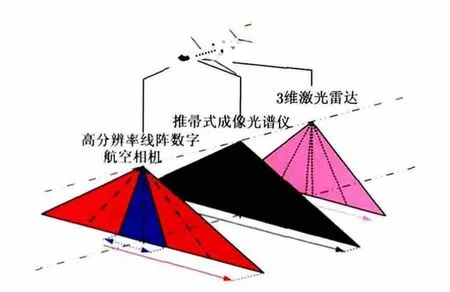
圖1 多光學載荷遙感飛機工作示意圖Fig.1 The schematic diagrams of multiple optical payload remote sensing airplane
6.2 柔性長基線InSAR
● 主子節點數:2~3個
● 空間分布:8~100 m
● 相對位置測量精度:1~2 mm
應用平臺除機載8~15 m長柔性基線InSAR外,還要考慮星載60~100 m長柔性基線InSAR系統。
星載柔性長基線InSAR的示例如圖2所示的美國航天飛機載SRTM系統[7]。

圖2 美國航天飛機載柔性長基線SRTM系統Fig.2 Space shuttle SRTM with flexible long baseline
6.3 機載稀疏陣列天線3D-SAR
● 主子節點數:8~16個
● 空間分布:10~15 m
● 相對位置測量精度:1 mm-0.0625λ
機載稀疏陣列天線3D-SAR工作示意圖[8,9]如圖3所示。
6.4 艇載共形稀疏陣列天線成像雷達
● 主子節點數:20~30個
● 空間分布:70~100 m
● 相對位置測量精度:1 mm-0.0625λ
艇載共形稀疏陣列天線成像雷達工作示意圖[10]如圖4所示。
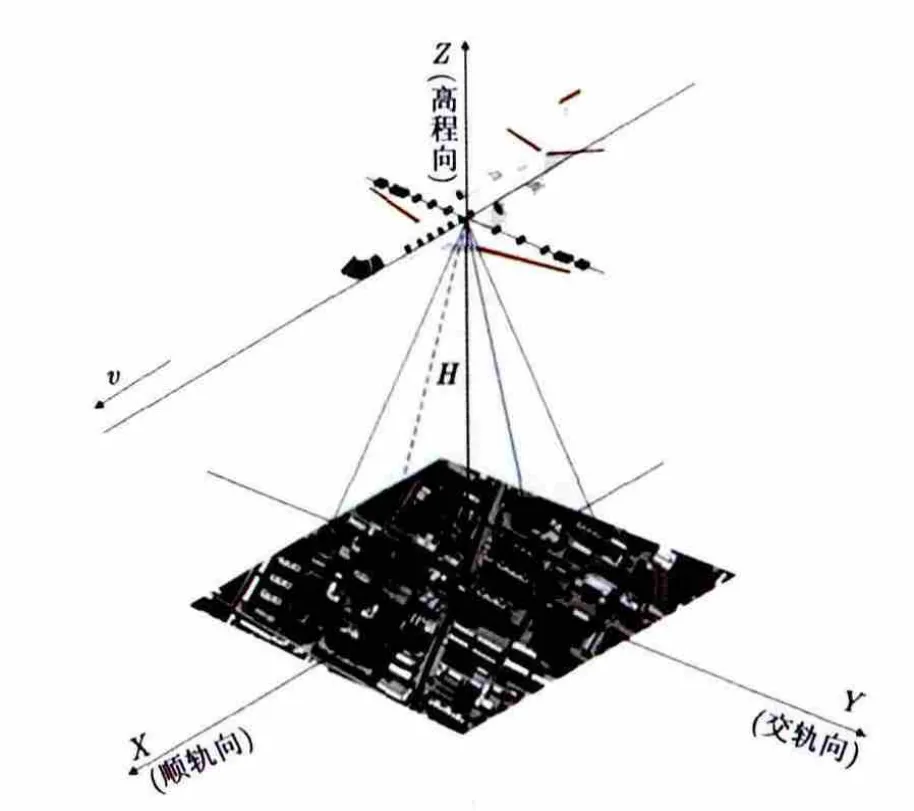
圖3 機載稀疏陣列天線3D-SAR工作示意圖Fig.3 The schematic diagrams for airborne sparse array 3D-SAR system

機載稀疏陣列天線3D-SAR和艇載共形稀疏陣列天線成像雷達將采用基于子陣結構的陣列天線,由于子陣數量較多,所需固聯在子陣相位中心處的IMU數量也較多,要求以測量陣列形變為主要目的的分布式POS子節點具有較高的位置測量精度,同時具有較小的體積和重量。
要特別說明的是,POS輸出數據率較高,可感知平臺的高頻振動信息。為減少平臺高頻振動影響,可考慮在子陣和平臺間采取減振措施。在此基礎上,對POS以較高數據率輸出的數據進行濾波處理,有可能會進一步提高位置和姿態測量精度。針對實際應用情況,選用適當的POS數據濾波方法,也是未來研究工作中的一個重點。
文獻[11]研究了大型稀疏陣列天線成像雷達中的陣列形變誤差測量和補償方法,給出了子陣位置測量誤差在1 cm時的成像結果,從一個方面說明了分布式POS應用的可行性。
6.5 分布式小衛星雷達
● 主子節點數:2~6個
● 空間分布:200 m~2 km
● 相對位置測量精度:1~5 cm
美國的TechSat-21分布式小衛星雷達系統[12]如圖5所示。
7 結束語
分布式 POS的概念是我國根據高分辨率對地觀測系統的實際應用需求提出的,具有創新性,其技術實現難度很大,但具有重要的應用價值。
本文討論了分布式POS的體制,論述了其主要技術指標,明確了其可能的應用方向。針對不同的應用方式,初步分析了獲得高精度位置和姿態信息可能的技術途徑,對立足自我,突破高分辨率對地觀測系統的關鍵技術具有積極的推動作用。
感謝北京航空航天大學的房建成教授、鐘麥英教授、劉百奇博士、李建利博士、劉占超博士、郭佳博士對本文研究工作的無私幫助,與他們的討論使我們受益匪淺。

[1]POS AV510/610 Installation and operation manual[M].Applanix Corporation,2010.
[2]Carrara W G,Goodman R S,and Majewski R M.Spotlight Synthetic Aperture Radar Signal Processing Algorithms[M].Boston: Artech House,1995.
[3]劉百奇,房建成.一種基于可觀測度分析的 SINS/GPS自適應校正濾波新方法及其應用[J].航空學報,2008,29(2): 430- 436.Liu Bai-qi and Fang Jian-cheng.A new adaptive feedback kalman filter based on observability analysis for SINS/GPS[J].Acta Aeronautica Et Astronautica Sinica,2008,29(2):430-436.
[4]劉百奇,房建成.一種基于可觀測度分析的 SINS/GPS空中對準新方法[J].系統仿真學報,2008,20(16): 4302-4305.Liu Bai-qi and Fang Jian-cheng.Novel in-flight alignment based on observability analysis for SINS/GPS[J].Journal of System Simulation,2008,20(16): 4302-4305.
[5]王超,張紅,劉智.星載合成孔徑雷達干涉測量[M].北京: 科學出版社,2002.Wang Chao,Zhang Hong,and Liu Zhi.Spaceborne Synthetic Aperture Radar Interferometry[M].Beijing: Science press,2002.
[6]Li Dao-jing,Liu Bo,Pan Zhou-hao,et al..Airborne MMW InSAR interferometry with cross-track three-baseline antennas[C].9th European Conference on Synthetic Aperture Radar,Nuremberg,April 2012: 301-303.
[7]J J van Zyl.The shuttle radar topography mission (SRTM): a breakthrough in remote sensing of topography[J].Acta Astronautica,2001,48(5-12): 559-565.
[8]Hou Y N,Li D J,and Hong W.The thinned array time division multiple phase center aperture synthesis and application[C].IEEE International Geoscience and Remote Sensing Symposium (IGARSS’2008),Boston,America,2008:25-28.
[9]滕秀敏,李道京.機載交軌稀疏陣列天線雷達的下視三維成像處理[J].電子與信息學報,2012,34(6): 1311-1317.Teng Xiu-min and Li Dao-jing.Downward-looking 3D imaging processing for airborne cross-track sparse array radar[J].Journal of Electronics & Information Technology,2012,34(6): 1311-1317.
[10]Teng X M and Li D J.Stationary targets imaging and moving targets detection based on airship conformal sparse array[C].3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR’2011),2011: 396-399.
[11]侯穎妮,李道京,尹建鳳,等.基于稀疏綜合孔徑天線的艇載成像雷達研究[J].電子學報,2008,36(12): 2377-2382.Hou Ying-ni,Li Dao-jing,Yin Jian-feng,et al..Airship imaging radar based on aperture synthesis of thinned array[J].Acta Electronica Sinica,2008,36(12): 2377-2382.
[12]Martin M and Stallard M.Distributed satellite missions and technologies-the techsat 21 program[C].AIAA Space Technology Conference,1999: 28-30.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
