車引擎覆蓋件設(shè)計(jì)中點(diǎn)云重構(gòu)A級(jí)曲面的技術(shù)研究
2013-10-14 06:55:30周鋒周華章
機(jī)械制造與自動(dòng)化 2013年2期
關(guān)鍵詞:檢測(cè)設(shè)計(jì)
周鋒,周華章
(蘇州工業(yè)園區(qū)職業(yè)技術(shù)學(xué)院,江蘇蘇州 215123)
0 引言
歷年來,汽車制造行業(yè)中的車引擎覆蓋件設(shè)計(jì)A級(jí)曲面成為人們普遍關(guān)心的話題。在老的汽車業(yè)有這樣一種分類法:A面,車身外表面,白車身;B面,不重要表面,比如內(nèi)飾表面;C面,不可見表面。這其實(shí)就是A級(jí)曲面的基礎(chǔ)。但是現(xiàn)在隨著美學(xué)和舒適性的要求日益提高,對(duì)汽車內(nèi)飾件也提到了A-Class的要求。因而分類隨之簡(jiǎn)化,A面,可見(甚至是可觸摸)表面;B面,不可見表面。所以車覆蓋件的重構(gòu)A級(jí)曲面技術(shù)應(yīng)用,提高了整車外觀設(shè)計(jì)的水平[1]。
1 A級(jí)曲面評(píng)價(jià)標(biāo)準(zhǔn)和理論知識(shí)
1.1 A級(jí)曲面評(píng)價(jià)標(biāo)準(zhǔn)
A級(jí)曲面是車身工程領(lǐng)域的特定概念,首先由達(dá)索軟件公司提出,滿足一定數(shù)學(xué)要求和車工程要求的曲面。它既要滿足數(shù)學(xué)連續(xù)性要求,又要滿足汽車氣動(dòng)力學(xué)要求,外觀光順和美觀性要求,同時(shí)要求曲面上的控制點(diǎn)盡量排列均勻的四邊形,如圖1所示。
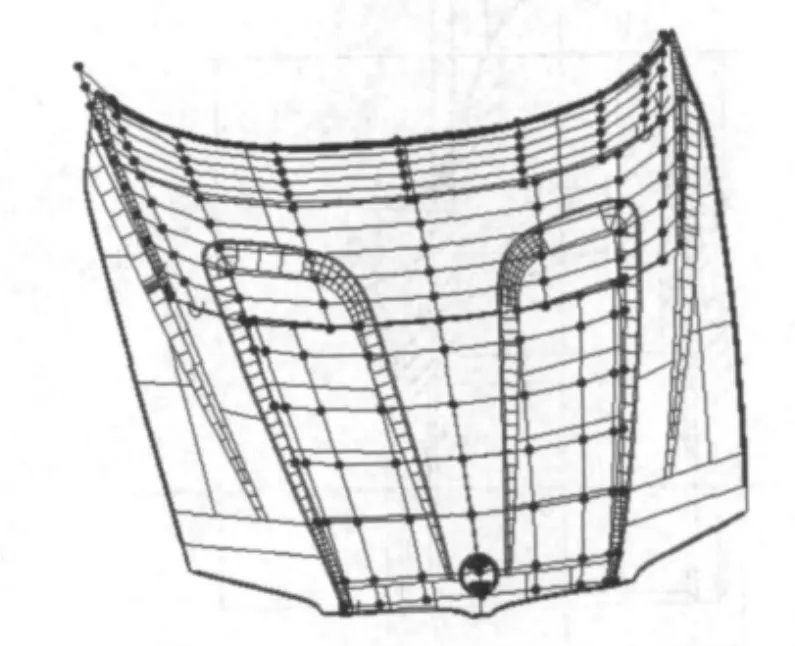
圖1 控制點(diǎn)均勻的方正四邊形
參照車身工程要求,A級(jí)曲面要滿足以下準(zhǔn)則[2]:
1)單一特征面的建模默認(rèn)誤差小于0.000 01,角度誤差小于 0.001°;
2)所有特征間的連接偏差小于0.000 1;
3)所有特征面的光順保證2階導(dǎo)數(shù)以上連續(xù);
4)所有特征都必須分解成單凸或單凹特征;
5)所有特征都必須具有可擴(kuò)展性和可編輯性。
1.2 相關(guān)理論知識(shí)
a)點(diǎn)云數(shù)據(jù)
車引擎覆蓋件設(shè)計(jì)中,點(diǎn)云數(shù)據(jù)是反映引擎覆蓋件理想設(shè)計(jì)曲面的數(shù)據(jù)集合,通過測(cè)量?jī)x器獲得。直接由測(cè)量?jī)x器的點(diǎn)云是個(gè)海量數(shù)據(jù)(幾十甚至上百兆個(gè)點(diǎn)),而且還存在重復(fù)測(cè)量數(shù)據(jù),系統(tǒng)測(cè)量誤差和隨機(jī)誤差等,必須對(duì)點(diǎn)云進(jìn)行處理3]。
b)NURBS面片
NURBS方法是當(dāng)前汽車界曲線、曲面的統(tǒng)一表示方法,已成為catia,ug,alias等商用CAD軟件的幾何模型數(shù)學(xué)基礎(chǔ)。Bizier和B-spline是NURBS的特殊情況。
NURBS 曲面的定義[4]:
式中:Vi,j(i=0,1,2,…,n;j=0,1,2,…,m;)為給定特征網(wǎng)格定點(diǎn)的位置矢量;Wi,j為對(duì)應(yīng)頂點(diǎn)的權(quán)因子。其中,基函數(shù)遞推公式為:

NURBS曲面用統(tǒng)一的表達(dá)式精確的表示了標(biāo)準(zhǔn)的解析形體和自由曲面。具有計(jì)算穩(wěn)定,線性變化時(shí)幾何不變性等特性。
2 基于imageware軟件應(yīng)用中NURBS面片的A級(jí)曲面重構(gòu)
經(jīng)三維激光測(cè)量?jī)x器掃描覆蓋件油泥模型獲得點(diǎn)云數(shù)據(jù)以后,可通過兩個(gè)階段實(shí)現(xiàn)A級(jí)曲面逆向重構(gòu):點(diǎn)云數(shù)據(jù)處理和曲面重構(gòu)[5],如圖2所示。
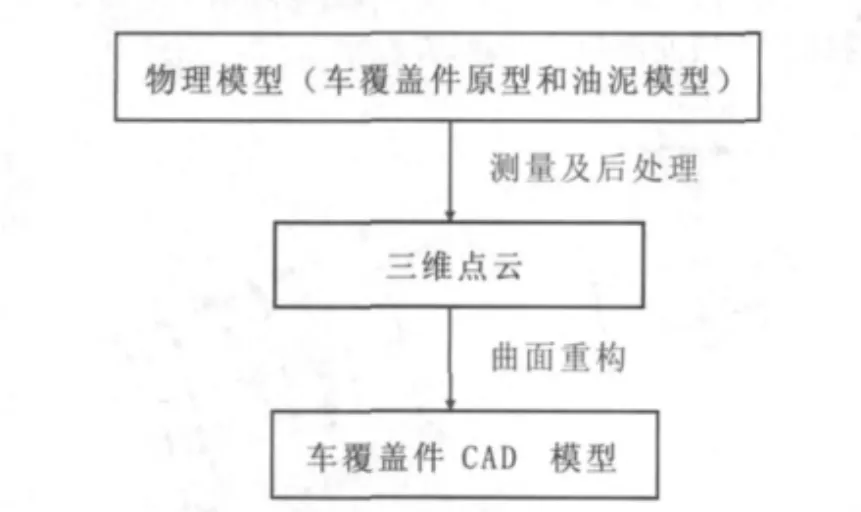
圖2 覆蓋件開發(fā)流程
2.1 點(diǎn)云去噪
數(shù)據(jù)測(cè)量過程中,由油泥模型制作、測(cè)量電壓波動(dòng)、空氣微塵漂浮和人為操作因素等造成的,與理想曲面法向偏差過大的散亂點(diǎn)稱為噪點(diǎn),它不反映油泥模型表面真實(shí)外觀品質(zhì)。去除噪點(diǎn),光滑點(diǎn)云,分兩步進(jìn)行:干涉區(qū)域剔除和分散點(diǎn)點(diǎn)剔除,如圖3所示,在imageware軟件中應(yīng)用刪除分散點(diǎn)命令和圈選點(diǎn)等命令來去噪[6]。
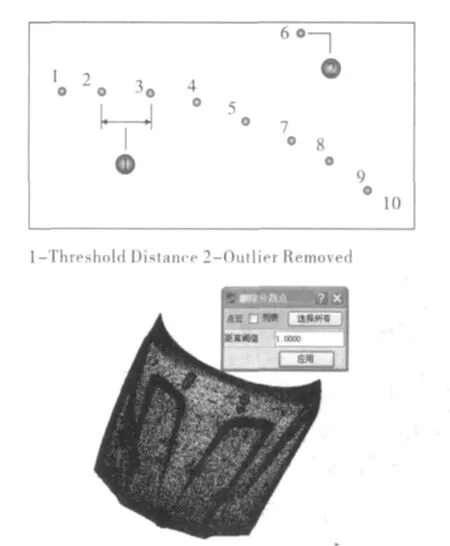
圖3 點(diǎn)云去噪原理圖和分散點(diǎn)命令應(yīng)用
2.2 點(diǎn)云數(shù)據(jù)精簡(jiǎn)和三角化點(diǎn)云
點(diǎn)云去噪后,對(duì)曲面重建和硬件計(jì)算量而言仍然存在垃圾數(shù)據(jù),必須按照一定算法和品質(zhì)要求精簡(jiǎn),以提高曲面重構(gòu)效率。處理海量點(diǎn)云數(shù)據(jù)時(shí),典型的處理方式是采用定義點(diǎn)距大小的方式縮減一部分?jǐn)?shù)據(jù),使點(diǎn)云看上去更清楚,也便于多邊形網(wǎng)格化數(shù)據(jù)或做其他處理,根據(jù)點(diǎn)云數(shù)據(jù)的特點(diǎn),可以選用以下方法:
1)曲率采樣法,根據(jù)曲面曲率變化確定點(diǎn)的取舍;
2)高斯采樣法,根據(jù)高斯算法進(jìn)行點(diǎn)云精簡(jiǎn);
3)球采樣法。
在imageware軟件中應(yīng)用應(yīng)用均勻采樣、弦偏差采樣、距離采樣來進(jìn)行點(diǎn)云精簡(jiǎn),如圖4所示。

圖4 點(diǎn)云精簡(jiǎn)原理圖和弦偏差采樣命令應(yīng)用
為了更清楚的表達(dá)點(diǎn)云的形狀或者為了快速原型(RP),同時(shí)重構(gòu)曲面時(shí)設(shè)計(jì)者更好觀測(cè)曲面曲率的走勢(shì)和曲率的變化,以及分割點(diǎn)云,創(chuàng)建特征線,要對(duì)點(diǎn)云進(jìn)行多邊形網(wǎng)格化處理,三角化點(diǎn)云后效果如同CAD模型顯示效果,鄰域尺寸值通常近似取精簡(jiǎn)點(diǎn)云中設(shè)定的距離公差值的3倍,這樣可以得到均勻的高品質(zhì)的網(wǎng)格,如圖5所示。
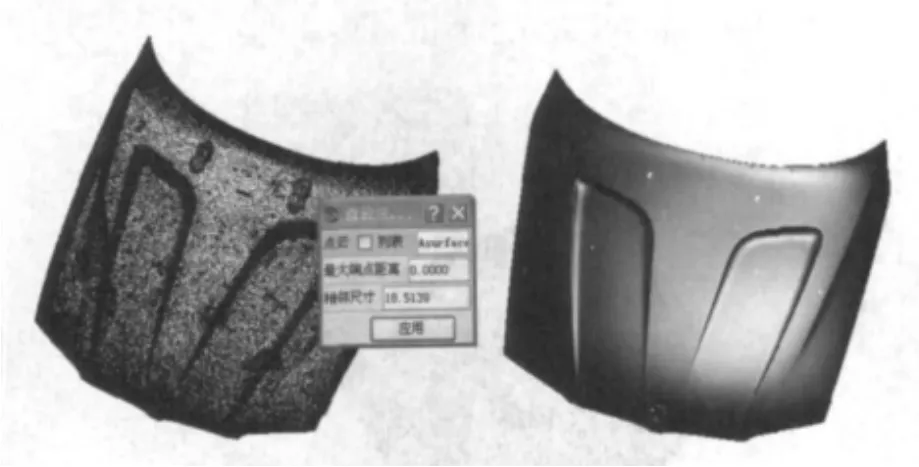
圖5 三角化點(diǎn)云和三角化點(diǎn)云后顯示效果
2.3 評(píng)估點(diǎn)云
為了評(píng)估點(diǎn)云,用一組有關(guān)數(shù)據(jù)顯示的工具來檢驗(yàn)點(diǎn)云的品質(zhì),要使用點(diǎn)云反射率工具顯示在點(diǎn)光源中點(diǎn)云的顏色,可以更好感受到這些投影到點(diǎn)云上的顏色區(qū)域表示了什么。連續(xù)或者柔和過渡的區(qū)域?qū)?huì)以相近的顏色進(jìn)行著色渲染,如過點(diǎn)云品質(zhì)不好,那么就該重新調(diào)整前面進(jìn)行的所用處理的公差值。
2.4 A級(jí)曲面重構(gòu)
曲面重構(gòu)是逆向工程中的一個(gè)關(guān)鍵環(huán)節(jié)。它不僅要再現(xiàn)造型人員或原有產(chǎn)品的設(shè)計(jì)思想,還要修復(fù)或克服原有模型上存在的缺陷。因此在進(jìn)行曲面重構(gòu)之前,應(yīng)該對(duì)零件進(jìn)行仔細(xì)分析,主要考慮以下要點(diǎn):
1)確定設(shè)計(jì)的整體思路。面對(duì)點(diǎn)云數(shù)據(jù),首先要周全地考慮好先做什么,后做什么,用什么方法做,主要是將模型劃分為幾個(gè)特征區(qū),得出設(shè)計(jì)的整體思路。
2)確定模型的基本構(gòu)成形狀的曲面類型,這關(guān)系到在曲面重構(gòu)中所采用曲面重構(gòu)方法和工具的選用。
采用基于NURBS面片的方法重構(gòu)A級(jí)曲面,分為四個(gè)步驟:快速創(chuàng)建曲面片、曲面擬合、曲面匹配、曲面品質(zhì)檢測(cè)。
a)創(chuàng)建曲面片
選取分片點(diǎn)云四個(gè)端點(diǎn)作為曲面片邊界范圍,建立一個(gè)4×4階NURBS曲面片擬合點(diǎn)云數(shù)據(jù),若不能滿足形狀需求,可相應(yīng)增加曲面階數(shù),但一般不超過6×6階,否則繼續(xù)進(jìn)行區(qū)域點(diǎn)云分割,如圖6所示。
b)曲面擬合
曲面由一組控制點(diǎn)來控制形狀,這樣就可以通過調(diào)整控制點(diǎn)靈活地改變曲面形狀和大小,減少曲面與點(diǎn)云數(shù)據(jù)之間的誤差,實(shí)現(xiàn)任意復(fù)雜形狀的曲面,提高了快速造型能力,如圖7所示。
c)曲面匹配

創(chuàng)建各NURBS曲面片完成后,檢查曲面間是否存在縫隙,如有縫隙,可使用拼接和縫合功能,進(jìn)行G1,G2級(jí)匹配,檢測(cè)并確認(rèn)曲面切向連續(xù)性、曲率連續(xù)性滿足。在imageware中,不僅可以實(shí)現(xiàn)兩兩曲面之間的曲率連續(xù)性匹配,還能實(shí)現(xiàn)一個(gè)曲面與多個(gè)曲面間的曲率連續(xù)性匹配。并能達(dá)到拼接和縫合后的曲面之間實(shí)現(xiàn)曲率連續(xù),從而保證了A級(jí)曲面的品質(zhì),如圖8所示。
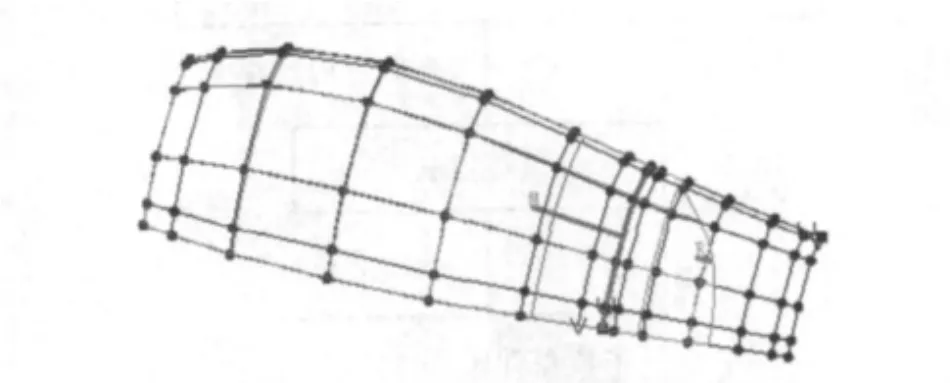
圖8 曲面匹配
d)曲面檢測(cè)
曲面檢測(cè)有以下含義:一是檢測(cè)曲面外觀品質(zhì),即曲面是否達(dá)到車身覆蓋件工程的要求;二是檢測(cè)逆向構(gòu)造曲面與原始點(diǎn)云之間的法向距離是否滿足要求。
曲面品質(zhì)檢測(cè)可采用如下幾種方法:
1)反射線法,反射線的連續(xù)次數(shù)比曲面的連續(xù)次數(shù)小一次。反射線光滑過渡,則兩曲面曲率連續(xù),如圖9所示。

圖9 反射線法構(gòu)成示意圖和A面反射線法檢測(cè)效果
2)等照度法,等照度線的連續(xù)次數(shù)比曲面的連續(xù)次數(shù)小一次,如果相鄰曲面上的等照度線光滑過渡,則滿足曲率連續(xù),如圖10所示。
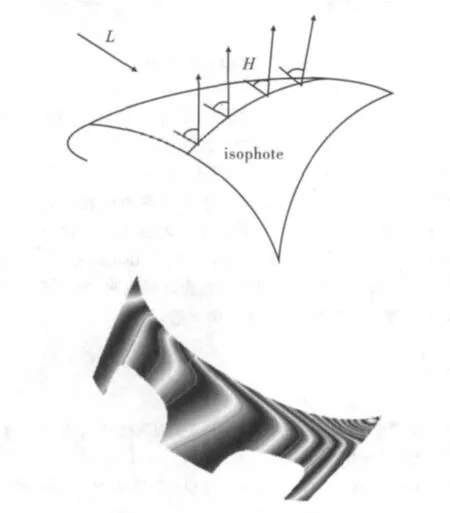
圖10 等照度線構(gòu)成示意圖和A面等照度法檢測(cè)效果
3)高光線法,它的原理與反射線法基本相同。
4)截面線法,A級(jí)曲面要求,截面線的曲率變化均勻,沒有多余拐點(diǎn),截面線形狀變化均勻。
對(duì)于曲面檢測(cè)的第二層要求,可采用法向距離偏差檢測(cè)方法,檢測(cè)曲面片與原始點(diǎn)云的距離符合程度。
3 車引擎覆蓋件A級(jí)曲面imageware建模應(yīng)用技術(shù)實(shí)例
以寶馬某車型引擎蓋為例,采用基于imageware軟件應(yīng)用中NURBS面片的A級(jí)曲面重構(gòu)方法進(jìn)行逆向造型設(shè)計(jì)。
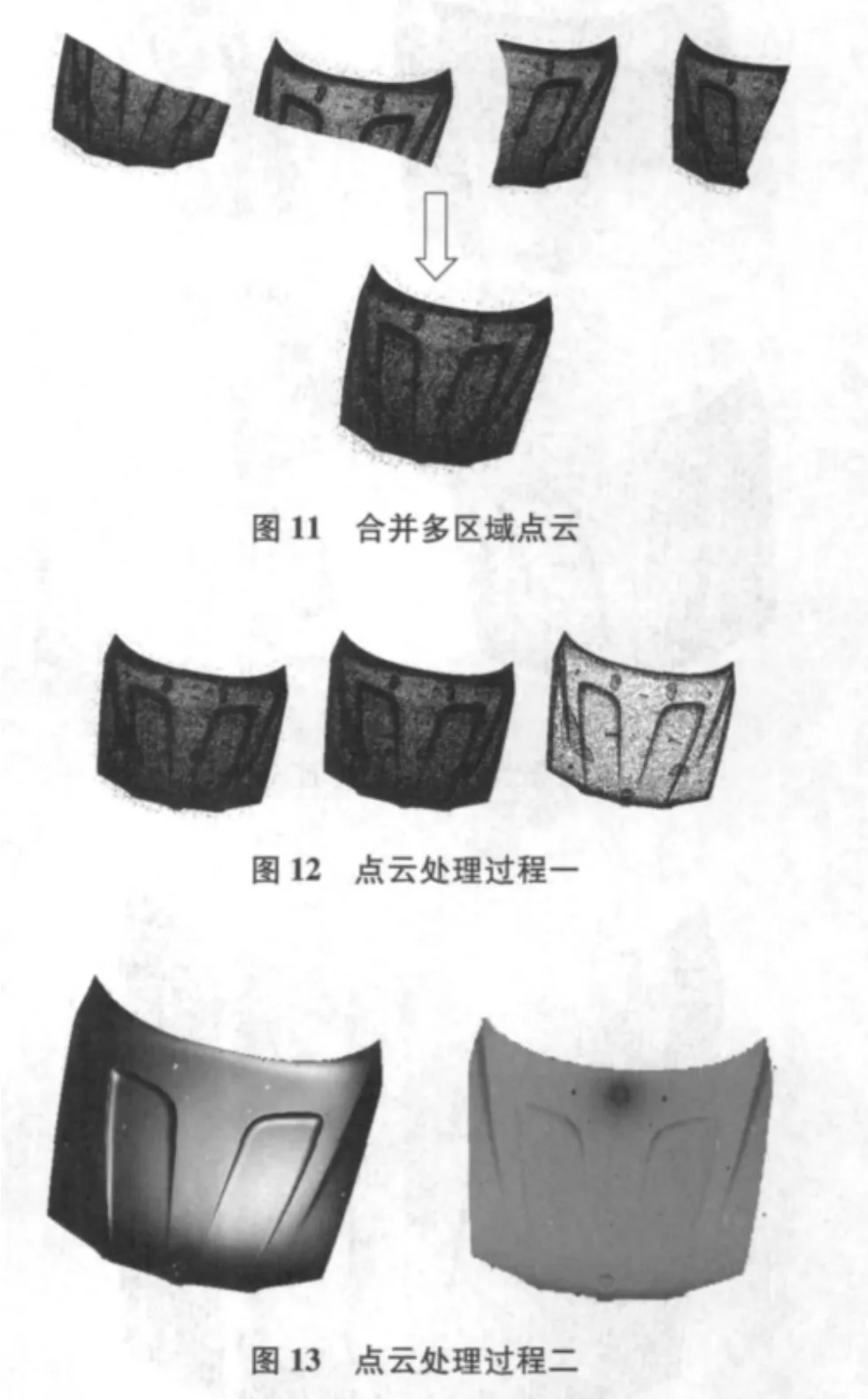
a)使用美能達(dá)三維激光掃描測(cè)量?jī)x掃描車引擎蓋油泥模型,獲得igs格式三維點(diǎn)云數(shù)據(jù),導(dǎo)入imageware軟件中,1)引擎蓋覆蓋件尺寸較大,激光掃描儀有掃描范圍限制,點(diǎn)云數(shù)據(jù)采集,只能分區(qū)域掃描,因此要合并多區(qū)域點(diǎn)云,如圖11合并多區(qū)域點(diǎn)云所示;2)進(jìn)行點(diǎn)云數(shù)據(jù)處理,點(diǎn)云處理過程如圖12所示;3)三角化點(diǎn)云;4)評(píng)估點(diǎn)云,如圖13點(diǎn)云處理過程二所示,
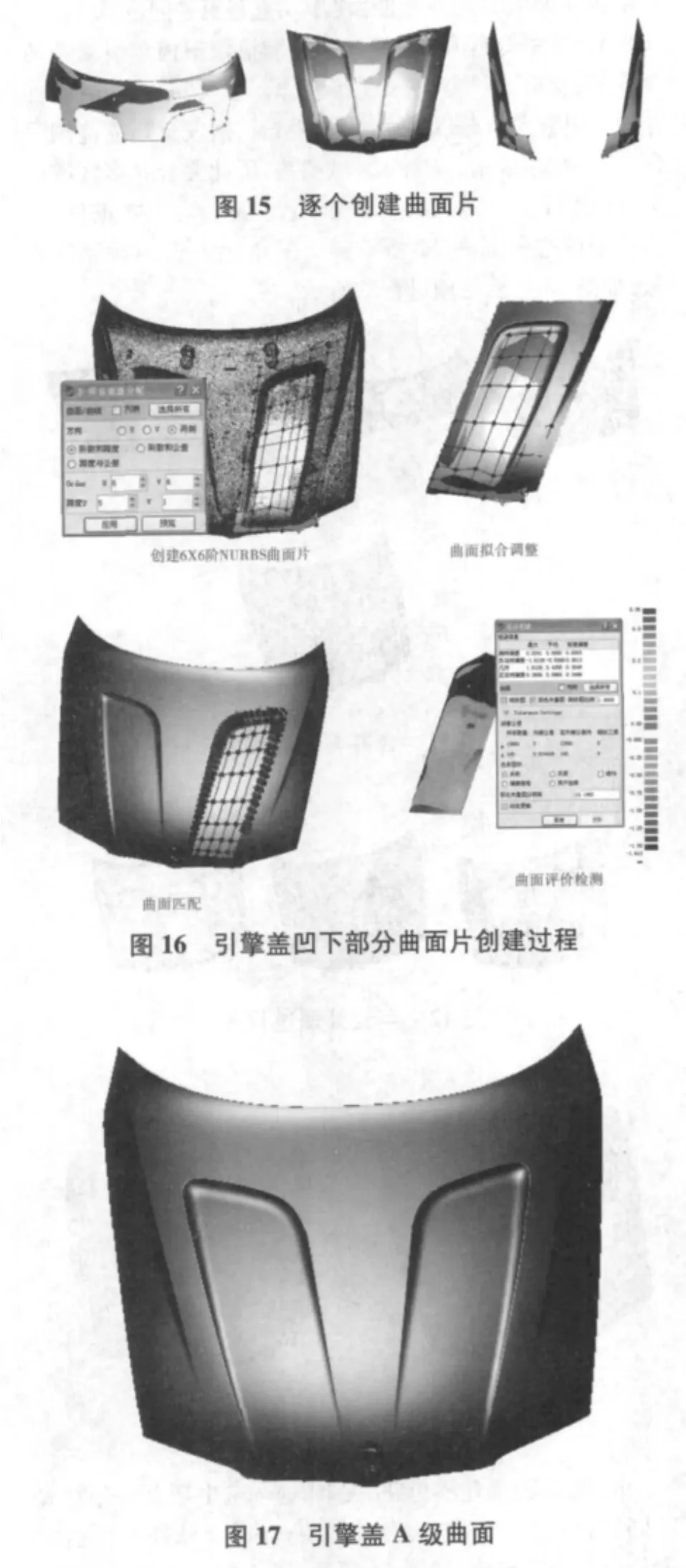
b)根據(jù)曲面建模思路,在imageware中把點(diǎn)云分割成不同的分片點(diǎn)云區(qū)域,以便應(yīng)用imageware軟件的構(gòu)造曲面片命令快速重建,如圖14所示;逐個(gè)創(chuàng)建曲面片,如圖15所示;這里僅給出引擎蓋凹下部分曲面片創(chuàng)建過程:1)應(yīng)用自由曲面和邊界曲面創(chuàng)建4×4階NURBS曲面;2)曲線和曲面控制點(diǎn)法向擬合調(diào)整;3)面與面之間的曲率匹配;4)外觀評(píng)價(jià)檢測(cè);如圖16所示。按前述過程最終生成引擎蓋整體曲面,如圖17所示。
圖14 分片點(diǎn)云
c)引擎蓋曲面及偏差檢測(cè)
經(jīng)imageware軟件檢測(cè),引擎蓋曲面單一曲面均為單凸特征,階數(shù)均在6階以下,單一特征面的建模默認(rèn)誤差小于 0.000 01,角度誤差小于 0.001°,相切誤差小于0.05,曲率連續(xù)性誤差小于0.05,如圖18所示;外觀環(huán)境反射較好,如圖19所示,符合車身A級(jí)曲面工程要求。
4 結(jié)語

在汽車的車身覆蓋件設(shè)計(jì)中,A面憑借其高品質(zhì)的外觀視覺享受,已成為汽車產(chǎn)品的競(jìng)爭(zhēng)法寶。A級(jí)曲面重構(gòu)是車引擎覆蓋件設(shè)計(jì)中關(guān)鍵和煩瑣的環(huán)節(jié)。逆向創(chuàng)建曲面過程中需要根據(jù)點(diǎn)云數(shù)據(jù)的光影效果選擇恰當(dāng)重構(gòu)方法。在寶馬轎車的車引擎覆蓋件設(shè)計(jì)項(xiàng)目中,采用基于NURBS面片的A級(jí)曲面逆向重構(gòu)方法,并以傳統(tǒng)產(chǎn)品外觀曲面設(shè)計(jì)思路為基礎(chǔ),建立了車外覆蓋件數(shù)字化曲面CAD模型,主要外覆蓋件滿足A級(jí)曲面要求。該方法提高了A級(jí)曲面重構(gòu)的效率和品質(zhì),所以Imageware在A面設(shè)計(jì)的表現(xiàn)大大提高了整車外觀設(shè)計(jì)的水平,縮短了產(chǎn)品開發(fā)周期,具有很高的工程實(shí)用價(jià)值。
[1]黃誠(chéng)駒,李鄂琴.逆向工程項(xiàng)目式實(shí)訓(xùn)教程[M].北京:電子工業(yè)出版社,2004.
[2]單巖,謝斌飛.Imageware逆向造型技術(shù)基礎(chǔ)[M].北京:清華大學(xué)出版社,2006.
[3]成思源.逆向工程技術(shù)綜合實(shí)踐[M].北京:北京電子工業(yè)出版社,2010.
[4]馬鐵利.車身class-A曲面模型的構(gòu)造[J].CAD/CAM與制造業(yè)信息化,2005.
[5]陳恭錦,習(xí)俊通.Imageware在摩托車覆蓋件反求工程中的應(yīng)用[J].計(jì)算機(jī)應(yīng)用技術(shù),2005.
[6]李曉麗.Imageware中光滑拼接曲面的方法[J].現(xiàn)代設(shè)計(jì)與先進(jìn)制造技術(shù),2007.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
