基于改進多尺度間隙度的海上目標分割方法
2013-11-12 08:39:32許少寶
激光與紅外 2013年1期
許少寶,王 蜂,陳 聰
(第二炮兵工程大學,陜西西安710025)
1 引言
在民用和軍事領域,利用無人飛行器對海面艦船目標進行搜索、識別和定位具有廣闊的應用前景,其所獲得的可見光圖像具有空間分辨率高、圖像內容豐富、目標結構明顯等特點,在海上艦船目標檢測識別方面比其他圖像更有優勢。
利用可見光圖像對海上艦船目標進行檢測識別,首要任務是對海上艦船目標進行分割,其困難在于要克服海面亮度變化、海浪和背景雜波的影響,而傳統的邊緣檢測和閾值分割方法效果不佳。眾多研究表明,海面等自然背景具有分形特征,艦船等人造物體不具有分形特征,可以利用艦船目標與海面背景的分形特性差異對艦船目標進行分割[1],文獻[1]和文獻[2]分別利用多尺度分形特征和間隙度特征對艦船目標進行分割檢測,都取得了一定的效果,但仍不能很好地抑制海面亮度變化、海浪和背景雜波的影響。文獻[3]中Dong提出的間隙度提取算法比其他的提取算法更能準確提取圖像的間隙度特征[4],本文根據這個算法提取了圖像的多尺度間隙度特征圖并進行分析,發現其容易受海面亮度變化、海浪和背景雜波的影響,艦船與海面背景的可分離性不強。為此,本文對Dong提出的間隙度提取算法進行了改進,用滑動盒子內像素值方差計算滑動盒子的質量,更合理地反映了滑動盒子內的像素起伏程度,增強了海面背景與艦船目標的可分離程度,并應用到海面背景下的艦船目標分割中,取得了很好的效果。
2 間隙度特征的概念及提取算法
2.1 間隙度和多尺度間隙度的概念
在分形理論中,分形維是最常用的分形特征,其與紋理的視覺粗糙度相對應,但利用盒維計算方法得到的分形維具有尺度不變性,鑒于其在尺度上的這種缺陷,Mandelbrot建議將間隙度作為分形維的一種補充。
間隙度特征是一種重要的高階分形特征,可以描述圖像中各種形狀的混合程度、像素強度的不規則分布和分形集質量變化的快慢,能定量評估圖像中像素紋理的間隙尺寸或空洞的大小,其定義如下:

式中,M(L)是分形集在尺度L上的質量;E[M(L)]為分形集質量的期望,式(1)反映的是分形集質量M的理論值與實際值的偏差。
在多尺度條件下,海面背景等自然物和艦船目標等人造物的間隙度特征具有不同變化規律。隨著尺度L的增大,由于海面背景等自然物能滿足分形模型,其間隙度特征趨于恒定值,而艦船目標一般不滿足分形模型,隨尺度變化間隙度特征有較大的變化,并且其各尺度的間隙度特征都大于海面背景在相應尺度上的間隙度特征。因此,累積多尺度條件下的間隙度特征,可以增加該特征對海面背景和艦船目標的可分離程度,定義多尺度間隙度特征為間隙度在多尺度下的累計和,其表達式為:

2.2 間隙度特征的提取算法
目前,計算間隙度特征的主要方法是由Dong提出的基于差分盒維法(differential box counting)和滑動盒子算法(gliding-box algorithm)的計算方法,該方法經實驗證明比其他方法更能準確的提取圖像的間隙度特征[4],其計算過程如下:
(1)在圖像中取w×w矩形窗口的小圖像,利用r×r的盒子在矩形窗口中滑動,從矩形窗口左上角移動至右下腳,每次移動一個像素點的距離,逐行逐列移動,其中r<w,w是奇數。定義滑動盒子的質量M為:

其中,n(i,j)=g(i,j)-b(i,j),g(i,j)為滑動盒子內的最大像素值;b(i,j)為盒子內的最小像素值;是加權系數;g是w×w矩形窗口內的最大像素值,M描述了r×r盒子內像素強度的起伏強度。
(2)計算矩形窗口內擁有質量為M的r×r滑動盒子數目n(M,r),可得到滑動盒子質量的概率分布函數為:

(3)w×w矩形窗口的中心像素點的間隙度為:

將矩形窗口從圖像中的左上角移動到右下角,每次移動一個像素點的距離,逐行逐列移動,即可得到圖像中所有像素點的間隙度特征。
2.3 間隙度特征提取算法存在的問題
根據以上間隙度特征的提取算法,提取圖1(a)的多尺度間隙度特征圖,如圖1(b)所示,圖1(c)為其多尺度間隙度特征的空間分布圖。
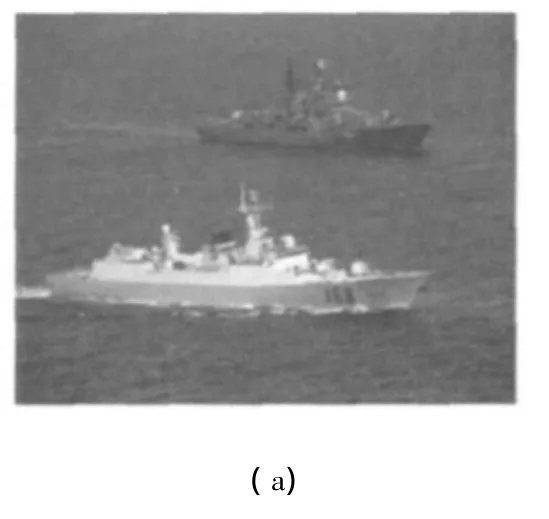
圖1 多尺度間隙度特征圖和空間分布圖
從圖1(b)與圖1(c)中可看出,圖像中艦船邊緣處的多尺度間隙度特征值比較大,但部分海面背景的多尺度間隙度特征值也比較大,不易于將艦船與海面背景分離開。究其原因,主要是因為其r×r滑動盒子的質量M由式(3)計算得到,而n(i,j)=g(i,j)-b(i,j),g(i,j)為盒子內的最大像素值,b(i,j)為盒子內的最小像素值,用以描述r×r的盒子內像素幅度的起伏強度,而圖像中海面亮度變化大、海浪和背景雜波存在的地方,其像素幅度都比較大,容易導致其所在的滑動盒子內像素最大值和最小值出現比較大的差值,放大了滑動盒子內像素強度的起伏程度,計算出來的間隙度特征就偏大,與艦船目標的間隙度特征值相近。這樣提取出來的間隙度特征就會對海面亮度變化、海浪和背景雜波比較敏感,難于將艦船目標與海面背景進行有效的分離。
3 間隙度特征提取算法的改進及應用
3.1 改進的間隙度特征提取算法
針對上文所分析的間隙度特征提取算法存在的問題,本文提出了新的滑動盒子質量計算方法,用滑動盒子內所有像素點的像素值方差計算滑動盒子的質量,其計算方法如下:式中,f(i,j)表示滑動盒子內像素點的像素值;b(i,j)表示滑動盒子內所有像素點的均值;n(i,j)為滑動盒子內所有像素點的像素值方差;M為滑動盒子的質量。采用這種方法計算滑動盒子的質量,可以更為精確的反映滑動盒子內像素幅度的起伏程度,在海面亮度變化、海浪和背景雜波存在的地方,其可以減小少數像素劇烈變化所造成的影響,整體性的降低海面背景的多尺度間隙度特征值,更為有效的拉開艦船目標與海面背景的多尺度間隙度特征差值,增強它們的可分離性。
用改進的算法提取圖1(a)的多尺度間隙度特征圖,如圖2(a)所示,圖2(b)為其多尺度間隙度特征的空間分布圖。
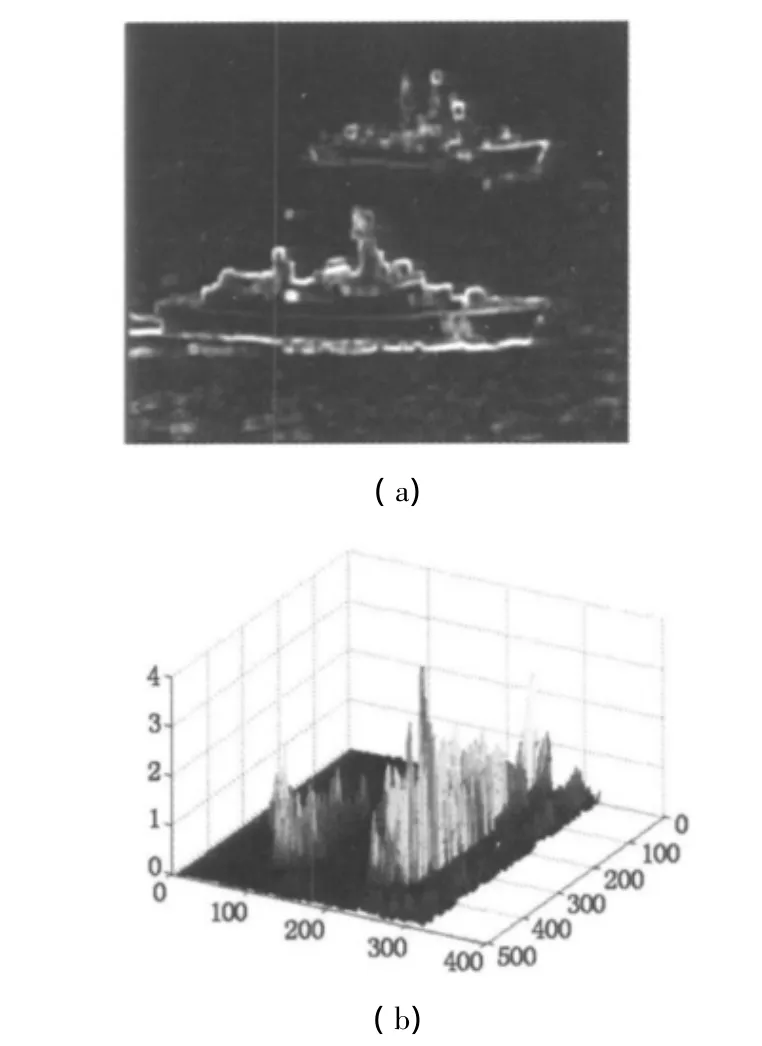
圖2 改進的多尺度間隙度特征圖和空間分布圖
從圖2可以看出,改進的間隙度特征提取算法可以更好的分離艦船目標與海面背景,在海浪和背景雜波處,其多尺度間隙度特征值仍遠小于艦船目標的特征值。這說明,改進的間隙度特征提取算法能夠更好的反映滑動盒子內像素的起伏強度,能有效抑制海面亮度變化、海浪和背景雜波的影響,計算出來的多尺度間隙度特征更能有效分離艦船目標與海面背景。
從以上的間隙度提取算法和仿真結果可得出,對于海面背景,紋理基元比較小,矩形窗口內的像素幅度起伏較小,滑動盒子的質量分布比較均勻,多尺度間隙度特征ρ較小;對于艦船目標,盡管經傳感器成像后圖像灰度呈現一定的非均勻性,但仍帶有人造物體的特性,近似成塊狀結構,因此可認為艦船目標圖像紋理基元較大,矩形窗口內的像素幅度起伏較大,滑動盒子的質量分布相對不規則,ρ較大。特別在圖像中目標的邊緣處,像素幅度的起伏比較強烈,邊緣像素點的矩形窗口內滑動盒子質量分布比較不規則,ρ比較大,也就是多尺度間隙度特征對圖像中的邊緣很敏感。因此,可利用多尺度間隙度特征對海面背景下的艦船目標進行分割。
3.2 基于改進多尺度間隙度特征的海上艦船目標分割方法
利用多尺度間隙度特征ρ對海上艦船目標進行分割,其主要分為以下四個步驟進行:
(1)濾波去噪。把可見光圖像轉化為灰度圖像,并進行中值濾波(針對椒鹽噪聲)和維納濾波(針對高斯白噪聲),消除噪聲的干擾;
(2)閾值分割。利用ostu閾值分割方法對圖像進行分割,確定潛在目標點N(k),k=1,2,…,m,m為潛在目標點的個數;
(3)用改進的算法提取多尺度間隙度特征。根據公式(2)、式(4)~式(8)提取圖像每個潛在目標點的多尺度間隙度特征;
(4)艦船目標判定。由于艦船等人造目標的內部各個組成部分的表面比較光滑,其多尺度間隙度特征比較小;海平面隨尺度的變大,間隙度特征趨于穩定,其多尺度間隙度特征也比較小;海平面與艦船目標的交界處,具有較強的邊緣,具有較高的多尺度間隙度特征。基于以上的分析,選取合適的多尺度間隙度特征閾值ρT,當ρ>ρT時,判斷為艦船目標邊緣。
4 實驗與分析
按照本文的算法,取w=15,r=3,5,…,13,利用Matlab分別對以下兩幅可見光圖像進行仿真,圖3(a1)中部分海面背景灰度值與艦船目標相似,海面亮度變化比較明顯,圖3(a2)中有比較明顯的海浪和背景雜波,仿真結果如圖3所示。圖3(b1)與圖3(b2)是sobel邊緣檢測結果,有很多的海浪的干擾沒有消除;圖3(c1)與圖3(c2)是ostu閾值分割結果,圖3(c1)出現部分白色區域,部分高灰度值的海面背景被分割為目標,圖3(c2)仍然有很多海浪和背景雜波的干擾沒有消除;圖3(d1)與圖3(d2)是基于傳統提取算法的多尺度間隙度特征分割結果,圖3(d1)中有很多高灰度值的海面背景被分割為目標,圖3(d2)中依然有不少海浪和背景雜波沒有消除;圖3(e1)與圖3(e2)是本文算法的分割結果,圖3(e1)中準確分割出了12個艦船目標,圖3(e2)中分割出了1個艦船目標,很好地消除了海面亮度變化、海浪和背景雜波造成的影響,有效分離了艦船目標和海面背景。
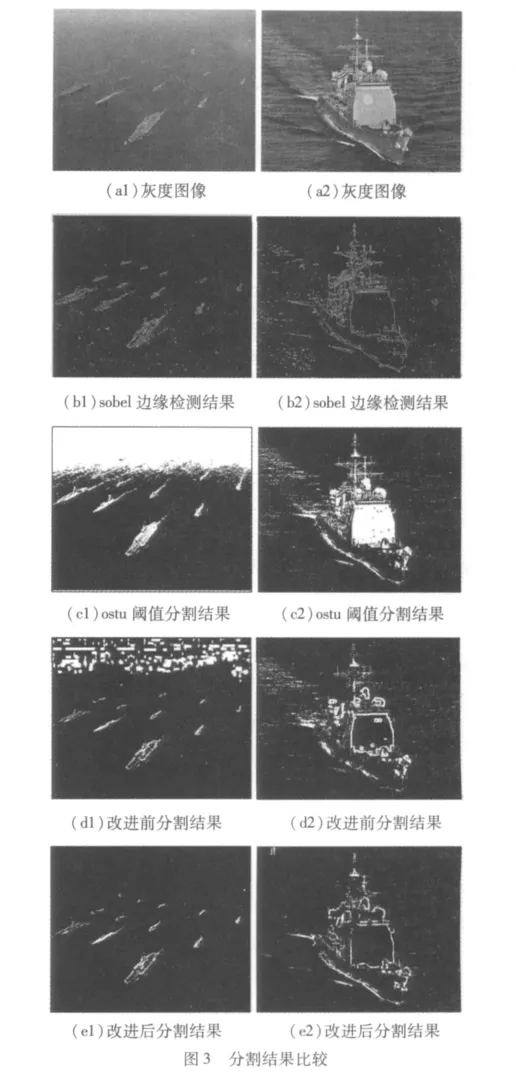
從圖3的仿真結果可知,基于改進多尺度間隙度特征的海上艦船目標分割結果優于sobel檢測、ostu閾值分割和基于傳統的多尺度間隙度特征分割的結果,能夠更好的抑制海面亮度變化、海浪和背景雜波的影響,準確分割出艦船目標。
5 結論
由于復雜海面背景下的可見光圖像艦船目標分割困難,容易受海面亮度變化、海浪和背景雜波的影響,本文引入并分析了圖像的多尺度間隙度特征,對Dong提出的間隙度特征提取算法進行改進,提高了海面背景與艦船目標的多尺度間隙度特征的可分離程度,并應用到了海上艦船目標分割中。實驗結果表明,基于改進多尺度間隙度特征的海上艦船目標分割方法優于sobel檢測、ostu閾值分割和基于傳統提取算法的多尺度間隙度特征分割的方法,能夠更好地抑制海面亮度變化、海浪和背景雜波的影響,準確分割出艦船目標,為艦船目標的分類識別打下了良好的基礎。
[1] Zhang Dongxiao,He Sihua,Yang Shaoqing.Ship targets detectionmethod based onmulti-scale fractal feature[J].Laser& Infrared,2009,39(3):315 -318.(in Chinese)
張東曉,何四華,楊紹清.一種多尺度分形的艦船目標檢測方法[J].激光與紅外,2009,39(3):315-318.
[2] He Sihua,Yang Shaoqing,Shi Aiguo,et al.Detection of moving target under sea background based on high-order fractal feature[J].Laser & Infrared,2008,38(6):602 -604.(in Chinese)
何四華,楊紹清,石愛國,等.基于高階分形特征的海面運動目標檢測方法[J].激光與紅外,2008,38(6):602-604.
[3] Dong P.Test of a new lacunarity estimation method for image texture analysis[J].Int.J.Remote Sens,2000,21(17):3369-3373.
[4] Du G.Eye location method based on symmetry analysis and high-order fractal feature[J].IEEE Proc.-Vis.Image Signal Process,2006,153(1):11 -16.
[5] Li Yu,Ji Kefeng,Su Yi,et al.The multi-scale lacunarity feature ofmobile targets in SAR imagery and the discriminating algorithm[J].Journal of Image and Graphics,2009,14(1):136 -141.(in Chinese)
李禹,計科峰,粟毅,等.SAR圖像機動目標的多尺度間隙度特征及其鑒別處理算法[J].中國圖像圖形學報,2009,14(1):136 -141.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
汽車工程師(2021年12期)2022-01-17 02:29:54
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20