基于魚群算法的仿人機器人步態(tài)優(yōu)化
2013-11-26 01:50:38盧嘉敏楊宜民付根平
智能系統(tǒng)學報 2013年6期
關(guān)鍵詞:優(yōu)化
盧嘉敏,楊宜民,付根平
(廣東工業(yè)大學自動化學院,廣東廣州510090)
雙足步行是仿人機器人實現(xiàn)其他功能的前提和基礎,是仿人機器人基本的特征和研究的熱點.因為仿人機器人具有結(jié)構(gòu)復雜、高階數(shù)、非線性、強耦合等特點,故采用傳統(tǒng)方法難以對其進行良好的控制,所以必須對步態(tài)進行優(yōu)化.文獻[1]假設步態(tài)的切換是瞬時進行的,用被動沖擊方程對切換過程進行建模,實現(xiàn)了五連桿無足平面雙足機器人的能量最優(yōu)、力矩最優(yōu)的步行和跑步步態(tài).文獻[2]不考慮側(cè)向運動的影響,通過一種力矩最優(yōu)的步態(tài)優(yōu)化方法得到能量最優(yōu)的步態(tài).而文獻[3]在文獻[2]的基礎上通過增加穩(wěn)定性約束,得到了能耗最小的優(yōu)化步態(tài),但仍在二維平面內(nèi)研究機器人的步態(tài),不適合仿人機器人在三維空間的步態(tài)優(yōu)化.文獻[4]以關(guān)節(jié)力矩變化最小為目標,優(yōu)化出穩(wěn)定的步態(tài),但該方法過程較復雜,只是得到了力矩最小而不是ZMP穩(wěn)定裕度最大的步態(tài).
1 步態(tài)規(guī)劃及其穩(wěn)定性分析
1.1 基于樣條插值的步態(tài)規(guī)劃
仿人機器人步態(tài)可以分為起步、周期步行和止步3個階段.3個階段都要滿足無奇異位姿、ZMP穩(wěn)定性約束、運動協(xié)調(diào)性和關(guān)節(jié)角度范圍限制等約束條件[5-9],故在起步階段需先讓仿人機器人的膝關(guān)節(jié)彎曲再執(zhí)行起步,起步完成后進入周期步行階段,在進入止步階段后需在雙足合攏時把雙膝伸直,恢復仿人機器人起步前的直立狀態(tài),以此完成止步.在徑向和側(cè)向平面內(nèi)把仿人機器人簡化成圖1所示的連桿模型,采用三次樣條插值方法[10]規(guī)劃出步態(tài)中的肩關(guān)節(jié)、踝關(guān)節(jié)和髖關(guān)節(jié)的運動軌跡,即θarm=f(θa,t),xankle=f(xa,za,t),xhip=f(dxs,dxe,t)和yhip=f(dys,dym,dye,t)(其中 θarm為手臂的肩關(guān)節(jié)擺動角,xankle為踝關(guān)節(jié)的位置,xa和za為各關(guān)鍵時刻踝關(guān)節(jié)的位置,xhip、yhip為髖關(guān)節(jié)的徑向、側(cè)向位置,dxs、dxe分別為擺動腳落地時和離地時髖關(guān)節(jié)到支撐腿踝關(guān)節(jié)的距離,dys、dym、dye分別為擺動腳落地、離地和抬到最高點時髖關(guān)節(jié)中心在y軸方向上的坐標),然后利用幾何關(guān)系由踝關(guān)節(jié)和髖關(guān)節(jié)的軌跡計算出膝關(guān)節(jié)的軌跡,最后通過逆運動學方程求得各關(guān)節(jié)的角度軌跡.

圖1 仿人機器人的連桿模型Fig.1 Link model of humanoid robot
1.2 腿部各關(guān)節(jié)對步態(tài)穩(wěn)定性的影響分析
仿人機器人的步態(tài)穩(wěn)定性由ZMP的穩(wěn)定裕度決定.ZMP的穩(wěn)定裕度是指機器人步行的ZMP值離有效穩(wěn)定區(qū)域邊緣的最小距離,ZMP的穩(wěn)定裕度越大,機器人的穩(wěn)定性能越好,即ZMP點越接近有效穩(wěn)定區(qū)域中間時機器人的步態(tài)越穩(wěn)定.
跟據(jù) ZMP 的計算公式[11]:

式中:mi為連桿i的質(zhì)量,xi、yi、zi為連桿i的質(zhì)心位置,g為重力加速度.由于ZMP的x分量和y分量類似,為了避免重復,下文只分析ZMP的x分量.把各連桿位姿與關(guān)節(jié)角度的關(guān)系代入式(1)后,得到式(2)所示的ZMP的x分量表達式:
式中:li、di分別為連桿i的長度和連桿質(zhì)心到相應關(guān)節(jié)的距離,qi為連桿i與z方向的夾角.
由于仿人機器人的質(zhì)量主要集中在軀干,而髖關(guān)節(jié)是控制上半身軀干位姿的主要關(guān)節(jié),所以髖關(guān)節(jié)對ZMP軌跡和機器人的步態(tài)穩(wěn)定性的影響很大.踝關(guān)節(jié)位姿是規(guī)劃仿人機器人落腳點、擺動腳高度和調(diào)節(jié)機器人步速的關(guān)鍵關(guān)節(jié),擺動腳高度會影響到機器人的雙腳力矩和能耗,步速的快慢會直接影響到ZMP的變化速率,從而影響機器人的穩(wěn)定性.膝關(guān)節(jié)是根據(jù)踝關(guān)節(jié)和髖關(guān)節(jié)軌跡通過幾何關(guān)系計算出的,故其對步態(tài)穩(wěn)定性的影響沒踝關(guān)節(jié)和髖關(guān)節(jié)大.圖2為根據(jù)式(2)計算所得的踝關(guān)節(jié)、髖關(guān)節(jié)以及膝關(guān)節(jié)對仿人機器人步態(tài)ZMP的影響圖,由圖可驗證,踝關(guān)節(jié)和髖關(guān)節(jié)對ZMP的影響較大,對仿人機器人的ZMP穩(wěn)定裕度有較大影響,其中踝關(guān)節(jié)和髖關(guān)節(jié)在起步步行階段對仿人機器人步態(tài)的穩(wěn)定性影響最為明顯,該影響隨著機器人步態(tài)進入周期步行階段和止步步行階段逐漸減少,而膝關(guān)節(jié)在步態(tài)的起步步行、周期步行和止步步行階段對仿人機器人步態(tài)的穩(wěn)定性影響都較小,可忽略不計,因此,對髖關(guān)節(jié)和踝關(guān)節(jié)進行優(yōu)化可以獲得ZMP穩(wěn)定裕度更大的仿人機器步態(tài).
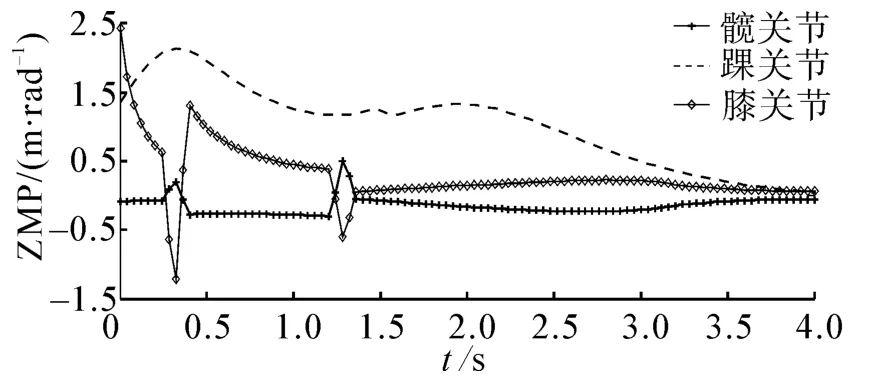
圖2 髖、踝和膝關(guān)節(jié)對機器人步態(tài)穩(wěn)定性的影響Fig.2 Influence of hip,ankle and knee joints on robot's gait stability
2 基于魚群算法的步態(tài)優(yōu)化設計
魚群算法是一種基于模擬魚群行為來尋找全局優(yōu)化的群智能算法[12].該算法對比傳統(tǒng)的優(yōu)化模式具有分布處理、尋優(yōu)速度較快、適應能力強的特點,因此,特別適合用于文中具有多約束條件、多參數(shù)的步態(tài)尋優(yōu).
2.1 魚群算法
魚群算法中,人工魚狀態(tài)表示為向量 Xi=[xi1xi2…xiD],i=1,2,…,N(N為人工魚群個體大小).xiD為第i條人工魚的第D維向量,每條人工魚狀態(tài)就是一個潛在的解,將Xi帶入被優(yōu)化的函數(shù),根據(jù)函數(shù)值的大小衡量Xi的優(yōu)劣.人工魚通過隨機解進行初始化,然后通過覓食、聚群及追尾等算子來更新自己,迭代搜尋最優(yōu)解,從而實現(xiàn)尋優(yōu).其中覓食、聚群、追尾算子和行為選擇具體如下.
1)覓食算子.
當人工魚當前狀態(tài)為Xi,在其感知范圍內(nèi)隨機選擇一個狀態(tài)Xi,如果發(fā)現(xiàn)Xi對應的函數(shù)值Yj(目標函數(shù))更優(yōu),則向該方向前進一步;反之,再重新隨機選擇狀態(tài)Xi,判斷是否滿足前進條件.這樣反復嘗試try_munber次(覓食行為最大嘗試次數(shù))后,如果仍不滿足前進條件,則隨機移動每步步長.
2)聚群算子.
當人工魚當前狀態(tài)為 Xi,探索當前鄰域內(nèi)di,j=‖Xi- Xj‖ < Visual(di,j為人工魚個體之間的距離,Visual為人工魚的感知距離)的伙伴數(shù)目nf及中心位置如果Yc/nf>δYi(δ為擁擠度),則表明伙伴中心有較多的食物并且不太擁擠,Xi應朝伙伴的中心位置方向前進一步;否則執(zhí)行覓食算子.
3)追尾算子.
當人工魚當前狀態(tài)為 Xi,探索當前鄰域內(nèi)di,j<Visual的伙伴數(shù)目 nf,發(fā)現(xiàn)伙伴中 Xi是伙伴中最優(yōu)的(即Xi對應的Yj為領(lǐng)域內(nèi)最優(yōu)解),如果Yc/nf>δYi,則表明伙伴Xi的狀態(tài)具有較高的食物濃度并且其周圍不太擁擠,則朝伙伴Xi的方向前進一步,否則執(zhí)行覓食算子.
4)行為選擇
根據(jù)所要解決的問題性質(zhì),對人工魚當前所處的環(huán)境進行評價,從而選擇一種行為.如對于求取極大值的問題,最簡單的評估方法可以用試探法,就是模擬執(zhí)行聚群、追尾等行為,然后評價行動后的值,選擇其中的最大者來實際執(zhí)行,默認的行為方式為覓食算子.
2.2 目標函數(shù)的構(gòu)造
仿人機器人要實現(xiàn)長久穩(wěn)定的步行,首先要求其步態(tài)具有較大的穩(wěn)定裕度和較小的能耗,故本文以ZMP穩(wěn)定裕度和整體能耗為參數(shù)共同構(gòu)造目標函數(shù).假設ZMP穩(wěn)定裕度的目標函數(shù)為JZ,整體能耗的目標函數(shù)為JA,則目標函數(shù)J=αJZ-βJA(其中α、β∈[0,1],是根據(jù)兩者對仿人機器人步行時的比重而設定,由于在JZ不變的情況下,能量消耗越小J越大,故JA前為減號).
對于JZ,由于仿人機器人步態(tài)是由單腳支撐和雙腳支撐交替作用實現(xiàn)的,故要對JZ進行分段討論.在步行的單腳支撐期,ZMP必須在支撐腳內(nèi)才能保證其步態(tài)的穩(wěn)定性.假設在第i個采樣時刻,ZMP到腳內(nèi)有效穩(wěn)定區(qū)域的x、y方向邊界的最小距離分別為dx、dy:

式中:a+b=1,且 a/b=Lfoot/Wfoot(Lfoot、Wfoot分別為機器人腳掌的長和寬),則單腳支撐期內(nèi)ZMP的目標值函數(shù)為

在雙腳支撐期,ZMP的穩(wěn)定區(qū)域為雙腳足底所構(gòu)成的六邊形,如圖3所示.
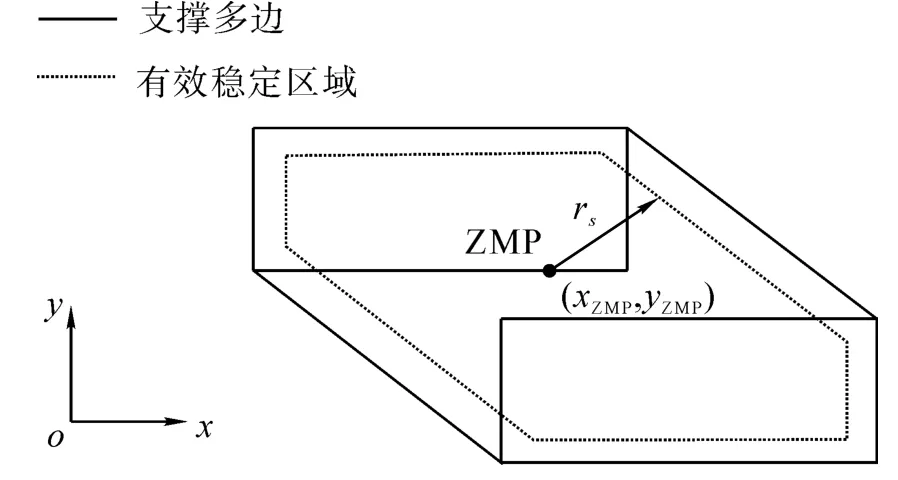
圖3 雙足支撐期穩(wěn)定區(qū)域Fig.3 The diagram of stability region for double phase
設在第j個采樣時刻ZMP點到區(qū)域邊界的最小距離為ds,則雙腳支撐期內(nèi)ZMP的目標值函數(shù)為

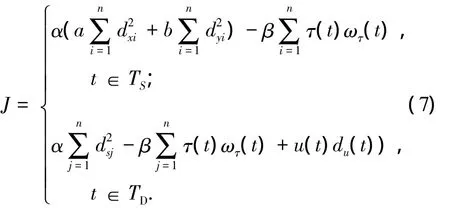
而在能耗方面,為保證目標函數(shù)值的光滑性,考慮到仿人機器人的能耗主要來源于驅(qū)動力的損耗,所以采用驅(qū)動力矩的函數(shù)來描述JA,即

式中:τ為關(guān)節(jié)驅(qū)動力矩,ωτ為關(guān)節(jié)角速度,u為雙腳支撐期雙腳受到的總力矩,du為雙腳支撐期雙腳受到的總力矩作用于機器人的力臂長,TS為單腳支撐期,TD為雙腳支撐期.終上所述,用于優(yōu)化的最終總目標函數(shù)為
2.3 基于魚群算法的步態(tài)優(yōu)化流程
1)初始化各參數(shù)值,設定人工魚群規(guī)模N、步長Step、擁擠度δ、最多嘗試數(shù)try_munber、delta、最大迭代次數(shù)maxgen,并設置迭代次數(shù)gen=1;
2)在待優(yōu)化步態(tài)參數(shù)的取值范圍內(nèi)初始化魚群,隨機得到 X1,X2,…,XN{},并由其計算出魚群中各魚之間的平均距離作為感知距離Visual,根據(jù)式(7)計算出各人工魚的食物濃度J,取最大者Jmax,并保存其狀態(tài);
3)各人工魚分別執(zhí)行追尾、聚群和覓食算子,并分別評價對應的J值,取聚群和追尾算子中的最優(yōu)J值與Jmax比較,如果J優(yōu)于Jmax狀態(tài),便取代之;
4)判斷結(jié)束條件:根據(jù)迭代次數(shù)maxgen是否滿足條件,若滿足條件則結(jié)束迭代,輸出最優(yōu)解,否則gen自增1,并轉(zhuǎn)3)繼續(xù).
3 仿真實驗及結(jié)果分析
本文在MATLAB 7.1環(huán)境下,以直立狀態(tài)的仿人機器人彎膝起步,接著周期步行直至停止步行并恢復身體直立狀態(tài)的步態(tài)仿真,以驗證本文利用魚群算法對步態(tài)參數(shù)優(yōu)化結(jié)果的有效性,同時將基于魚群算法的仿人機器人步態(tài)優(yōu)化(FSASP)與基于遺傳算法的仿人機器人步態(tài)優(yōu)化(GASP)的尋優(yōu)結(jié)果進行比較,說明本文方法的優(yōu)越性.仿人機器人的結(jié)構(gòu)參數(shù)如表1所示.

表1 仿人機器人各部分參數(shù)Table 1 Configuration parameters of humanoid robot
步態(tài)規(guī)劃方法如前文所述,相應參數(shù)為:仿人機器人雙臂距離0.20 m,兩髖關(guān)節(jié)距離0.10 m,腳掌寬度0.08 m,腳掌高度 0.045 m,下蹲高度0.03 m,抬腳高度 0.01 m,步長 0.10 m,步行周期 1.2 s,其中單腳支撐期為 0.96 s,雙腳支撐期為 0.24 s,采樣周期為0.01 s.魚群算法的相關(guān)參數(shù)為:N=4,Step=1,Visual=2,try_munber=50,delta=2,maxgen=100,α =0.8,β =0.2.由于魚群算法采用隨機方式初始化魚群,在重復運行30次魚群算法,求得的參數(shù)平均值如下:dxs=0.041 m ,dxe=0.33 m ,dys=0.039 m ,dym=0.031 m ,dye=0.009 m,把本文優(yōu)化后的參數(shù)值代入步態(tài)得到的ZMP軌跡如圖4所示,三維步態(tài)棍狀圖如圖5所示,穩(wěn)定裕度結(jié)果如圖6所示,能耗結(jié)果如圖7所示.

圖4 步態(tài)優(yōu)化后的ZMP軌跡Fig.4 The ZMP trajectory after gait optimization
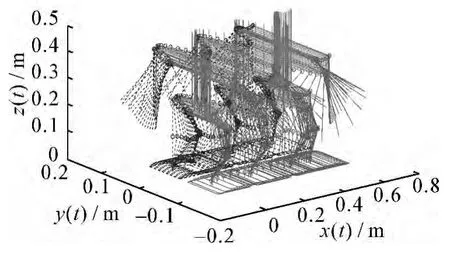
圖5 三維步態(tài)棍狀圖Fig.5 The stick figure of 3-D gait
4 結(jié)束語
本文分析了腿部各關(guān)節(jié)對仿人機器人步態(tài)穩(wěn)定性的影響,在徑向和側(cè)向平面內(nèi)選擇對機器人步態(tài)穩(wěn)定性影響較大的關(guān)節(jié)位置為尋優(yōu)參數(shù),以步態(tài)的ZMP穩(wěn)定裕度最大和整體能耗最小為目標構(gòu)造目標函數(shù),采用魚群算法對基于樣條插值方法規(guī)劃的仿人機器人步態(tài)進行優(yōu)化.仿真結(jié)果表明,該方法優(yōu)化后的步態(tài)ZMP穩(wěn)定裕度大、能耗小、平穩(wěn)流暢,同時較利用遺傳算法對步態(tài)進行優(yōu)化具有更好的全局搜索能力和更快的尋優(yōu)速度.

圖6 步態(tài)的ZMP穩(wěn)定裕度Fig.6 ZMP Stability margin of gait

圖7 步態(tài)的能耗Fig.7 Energy consumption of gait
從圖4~7可以看出,起步、周期步行和止步3種步態(tài)的ZMP軌跡基本位于支撐區(qū)域中心,ZMP的穩(wěn)定裕度大,步行的功率最小值和最大值分別為4.079 J、125.4 J,平均能耗為 76.2 J,仿人機器人步行自然、流暢、平穩(wěn)、能耗低,驗證了優(yōu)化結(jié)果的有效性.
表2為將FSASP和GASP分別重復運行30次,得到的尋優(yōu)結(jié)果.由表2可知,在對仿人機器人步態(tài)優(yōu)化中,本文FSASP相對于GASP更能脫離局部最優(yōu)收斂到全局最優(yōu),而且本文FSASP在30次的尋優(yōu)仿真中,尋優(yōu)平均耗時為6.97 s,而GASP尋優(yōu)平均耗時為15.40 s,即本文FSASP相對于GASP尋優(yōu)速度更快.
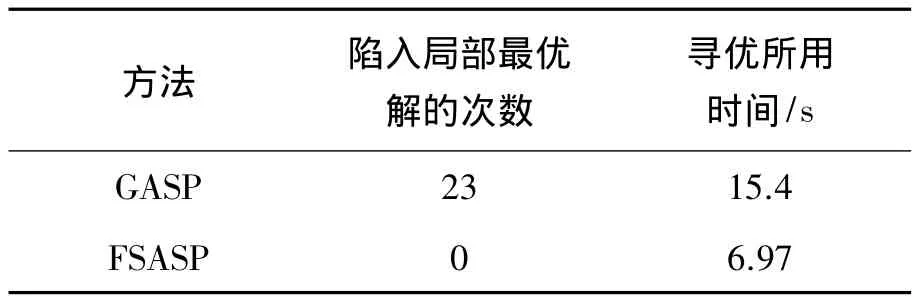
表2 2種方法30次重復優(yōu)化的結(jié)果Table 2 30 repeated optimization results of the two methods
[1]CHEVALLEREAU C,AOUSTIN Y.Optimal reference trajectories for walking and running of a biped robot[J].Robotica,2001,19(5):557-569.
[2]BESSONNET G,SEGUIN P,SARDAIN P.A parametric optimization approach to walking pattern synthesis[J].The International Journal of Robotics Research,2005,24(7):523-536.
[3]SHI Z,XU W,ZHONG Y,et al.Optimal sagittal gait with ZMP stabillity during complete walking cycle for humanoid robots[J].Journal of Control Theory and Applications,2007,5(2):133-138.
[4]NGUYEN T P,DAE W K,HAK K K,et al.An optimal control method for biped robot with stable walking gait[C]//2008 2th IEEE-RAS International Conference on Humanoid Robots.Daejeon,USA,2008:211-218.
[5]SHAFII N,KHORSANDIAN A,ABDOLMALEKI A,et al.An optimized gait generator based on Fourier series towards fast and robust biped locomotion involving arms swing[C]//IEEE International Conference on Automation and Logistics.Piscataway,NJ,USA:IEEE,2009:2018-2023.
[6]KAYNOV D,SOUERES P,PIERRO P,et al.A practical decoupled stabilizer for joint-position controlled humanoid robot[C]//The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ,USA,2009:3392-3397.
[7]伊強,陳懇,劉莉,等.考慮綜合行走約束的仿人機器人參數(shù)化3D步態(tài)規(guī)劃方法[J].機器人,2009,31(4):342-350.YI Qiang,CHEN Ken,LIU Li,et al.3D parametric gait planning of humanoid robot with consideration of comprehensive biped walking constraint[J].Robot,2009,31(4):342-350.
[8]KIM S,KIM C,YOU B.Stable whole-body motion generation for humanoid robots to imitate human motions[C]//The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems.Saint Louis,USA,2009:2518-2524.
[9]PETER S,JAROSLAV T,ZLATKO F,et al.Development of cognitive capabilities for robot Nao in center for intelligent technologies in Kosice[C]//2011 2nd International Conference on Cognitive Info-communications.Piscataway,NJ,USA,2011:1-5.
[10]HUANG Qiang,YOKOI K,KAJITA S,et al.Planning walking patterns for a biped robot[J].IEEE Transactions on Robotics and Automation,2001,3(17):280-289.
[11]棍田秀司.仿人機器人[M].北京:清華大學出版社,2007:87-91.
[12]JIANG Mingyan,WANG Yong.Spread spectrum code estimation by artificial fish swarm algorithm[C]//IEEE International Symposium on IntelligentSignalProcessing,2007,2007:1-6.
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45