CTCS3級列控車載協同仿真子系統的研究與實現
2013-11-27 07:18:58張亞東
鐵道標準設計 2013年11期
劉 霄,張亞東,郭 進
(西南交通大學信息科學與技術學院,成都 610031)
隨著高速鐵路的快速發展,列車運行速度越來越高,行車間隔不斷縮短,如何保障高速鐵路的行車安全,成為當前高速鐵路科學發展的重大科研問題。高速鐵路系統由高速列車[1]、列控系統[2]、牽引供電[3]、鐵路線路[4]等子系統組成。其中列控車載子系統負責為高速列車的運行提供控制信號,它的正確與否,對行車安全起著至關重要的作用。國內外針對列控車載子系統進行了大量的仿真研究,文獻[5-7]提出了車載中列車速度防護的算法;文獻[8-9]按照不同的功能模塊劃分實現了列控車載仿真系統;文獻[10-12]對列控車載子系統進行了仿真測試。上述研究提供了很多設計、實現和測試方法,但是缺少和高速列車、牽引供電、鐵路線路等其他高速鐵路子系統的聯合仿真,與高速鐵路實際運營情況相差較大,仿真結果的可信性較低。
本文通過研究如何實現高速鐵路耦合大系統下列控車載子系統與其他專業子系統之間的協同仿真,驗證高速鐵路設計的安全性能,對于保障我國高速鐵路的運營安全具有重要意義。
1 列控車載協同仿真子系統對外接口及內部結構
1.1 車載協同仿真子系統對外接口
在高速鐵路耦合大系統中,車載協同仿真子系統從列車自動駕駛子系統獲取列車控制方式、緩解、啟動指令和任務結束命令等;根據列控地面子系統提供的移動授權信息,結合高速列車動力學仿真子系統計算得到的列車位置和速度信息,完成列車速度防護曲線的計算,并生成控制命令;向自動駕駛子系統和牽引傳動子系統發送行車指導信息;實時記錄仿真結果數據,存入高速鐵路系統基礎數據庫。通過不同專業系統間的耦合仿真,較好地模擬了高速鐵路的實際運營情況。車載協同仿真子系統與耦合大系統間的接口如圖1所示。
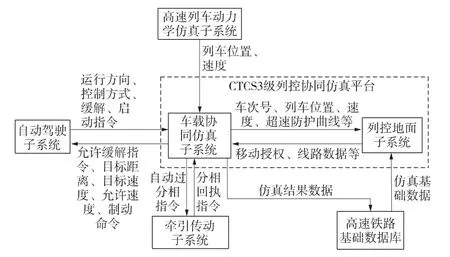
圖1 車載協同仿真子系統與耦合大系統接口框圖
1.2 車載協同仿真子系統內部結構
根據耦合大系統的功能需求,車載協同仿真子系統分為數據交互及處理、車載計算與速度防護(ATP)、DMI和仿真數據記錄等4個子功能模塊,如圖2所示。
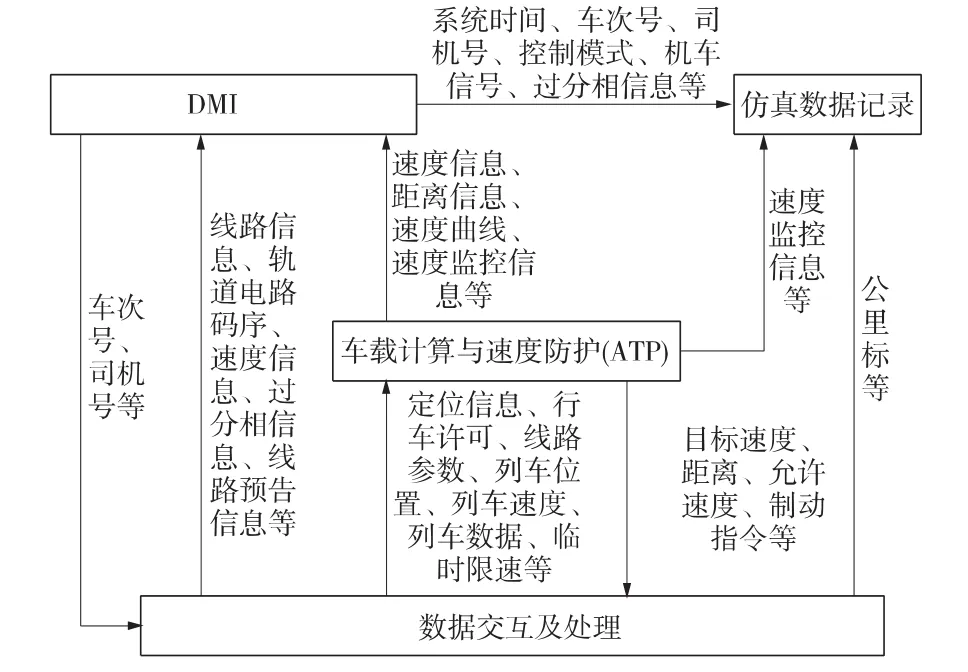
圖2 車載協同仿真子系統結構
數據交互及處理模塊負責完成車載協同仿真子系統與列控地面、列車自動駕駛、高速列車動力學、牽引傳動子系統和高速鐵路系統基礎數據庫之間的數據交互,并對收發的數據進行處理。車載計算與速度防護(ATP)模塊根據數據交互及處理模塊提供的列車運行參數、移動授權等信息,計算生成最限制速度曲線和目標-距離速度防護曲線,實現速度防護。DMI模塊根據規范[13],完成列車運行信息的顯示,并提供司機輸入數據接口。仿真數據記錄模塊實時將仿真結果數據存入高速鐵路基礎數據庫。
2 CTCS3級列控車載協同仿真子系統實現
列控車載協同仿真子系統負責保障行車安全,記錄運行數據等,因此它的設計一方面要研究速度防護算法,根據從自動駕駛、高速列車動力學和列控地面子系統獲得的數據,設計仿真邏輯,實現速度防護;另一方面要考慮與自動駕駛等子系統進行數據交互的時序。由于車載協同仿真子系統需要與多個子系統建立通信連接,啟動過程復雜,因此需要嚴格控制數據交互的內容及時序,確保高速鐵路耦合大系統協同仿真順利進行。
2.1 列車速度防護曲線計算
列車速度防護曲線包括緊急制動曲線和常用制動曲線[14]。緊急制動曲線保證了列車在最不利的情況下采取制動,而不會超出目標距離和目標速度。常用制動曲線是為降低列車觸發緊急制動頻度,提高列車運行的穩定性和舒適性而設定的。因此,緊急制動曲線是列車速度防護曲線計算的核心。當前列車速度防護多采用目標-距離模式曲線方式[15-16]。該方式根據一次制動曲線進行制動,能有效減小行車間隔。根據該方式,進行列車緊急制動曲線計算的方法如圖3所示。
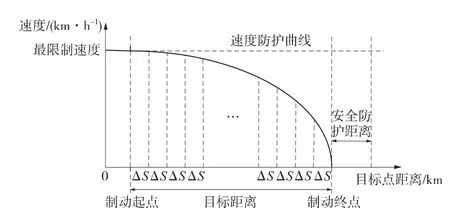
圖3 緊急制動曲線計算方法
首先,根據目標距離確定制動終點,從制動終點開始計算,以ΔS為步長,根據公式(1)進行迭代計算,直到計算結果v2大于或等于最限制速度,并將該段起點作為制動起點。

式中 v1——列車制動初速度,km/h;
w1——單位坡道附加阻力,N/kN;
w0——單位基本阻力,N/kN;
b——單位制動力,N/kN;
r——轉動慣量系數;
v2——列車制動末速度,km/h。
2.2 速度防護仿真實現
為保障列車安全運行,提高舒適性,車載協同仿真子系統需要根據從高速列車動力學仿真子系統獲得的列車當前位置和速度,以速度防護曲線為基礎,實時進行超速判斷。當列車超速時,及時向列車自動駕駛子系統發送相應的制動命令。
列車速度防護過程需要綜合考慮列車運行等級、故障情況等因素。不同等級下速度防護曲線計算所需的數據獲取方式不同;根據故障-安全原則,發生故障時,車載子系統進行降級運行或轉換行車模式,并將相應的控制信息發送給其他子系統。具體算法流程如圖4所示。
圖4中的列車速度防護的算法充分考慮了CTCS2級、CTCS3級以及故障、運行等情況,為高速鐵路耦合大系統在復雜環境下運行提供了安全、可靠的控制信息。
2.3 協同仿真時序控制
在高速鐵路耦合大系統下進行協同仿真時,列控車載協同仿真子系統的啟動,運行和結束過程都牽涉到與其他子系統復雜的數據交互,因此需要進行嚴格的時序控制。由于需要設計與多個子系統進行數據交互的通信接口,為提高程序的性能,本文采用多線程方法,通過控制線程創建時機,控制啟動時序。協同仿真運行過程中,分別在每個線程中設計相應的數據處理函數;最后各線程根據從列車自動駕駛子系統獲得的仿真結束指令發出任務結束信息。協同仿真時序見圖5。
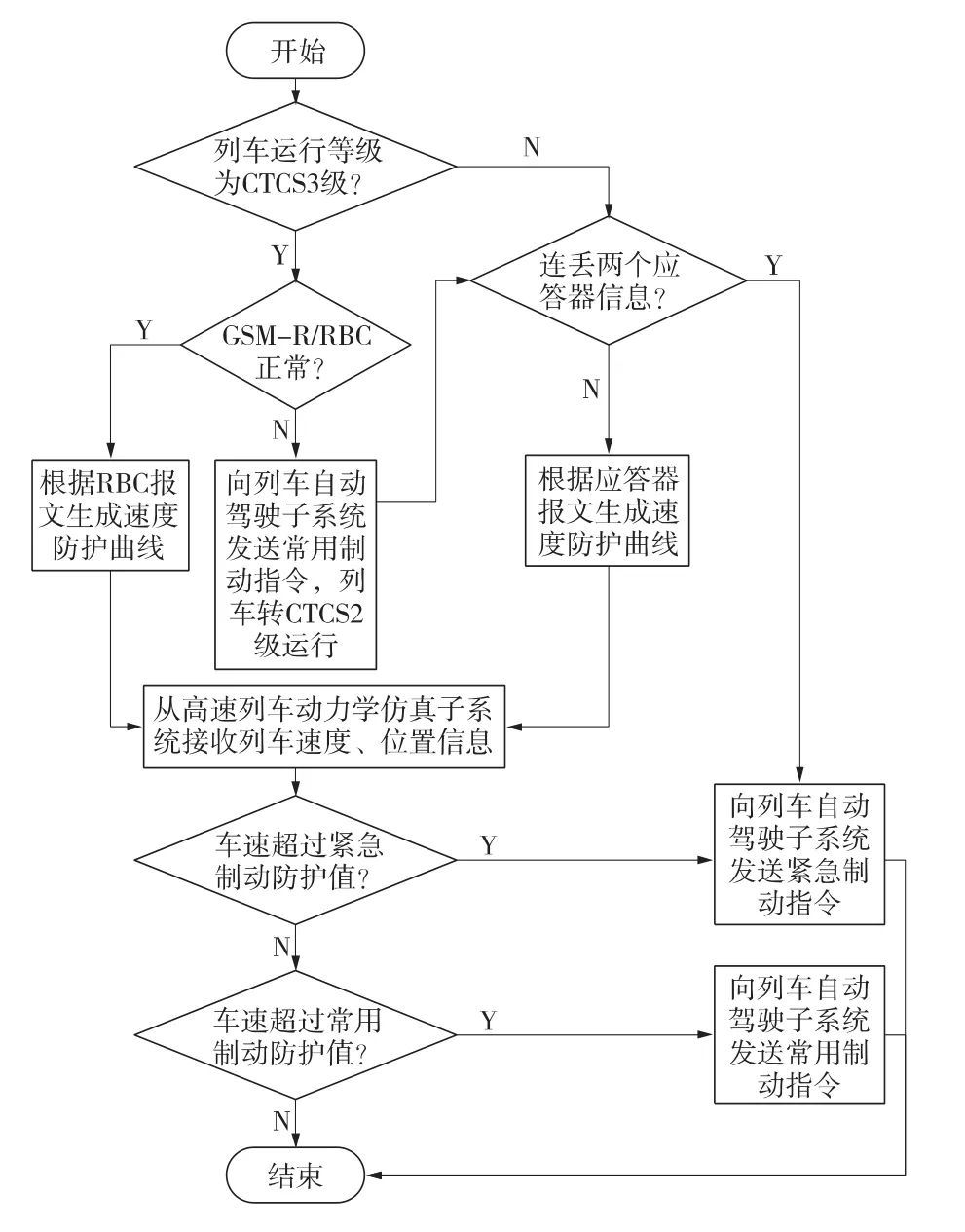
圖4 速度防護算法流程
3 仿真測試
車載協同仿真子系統DMI界面見圖6。
車載協同仿真子系統將從高速列車動力學仿真子系統獲得的列車當前速度、位置等信息以速度表盤的形式顯示;根據從列控地面子系統接收的移動授權以及線路數據,生成制動曲線,顯示在坐標區;當前系統時間、GSM-R連接狀態、制動預警信息等也以文本或圖標的形式顯示。
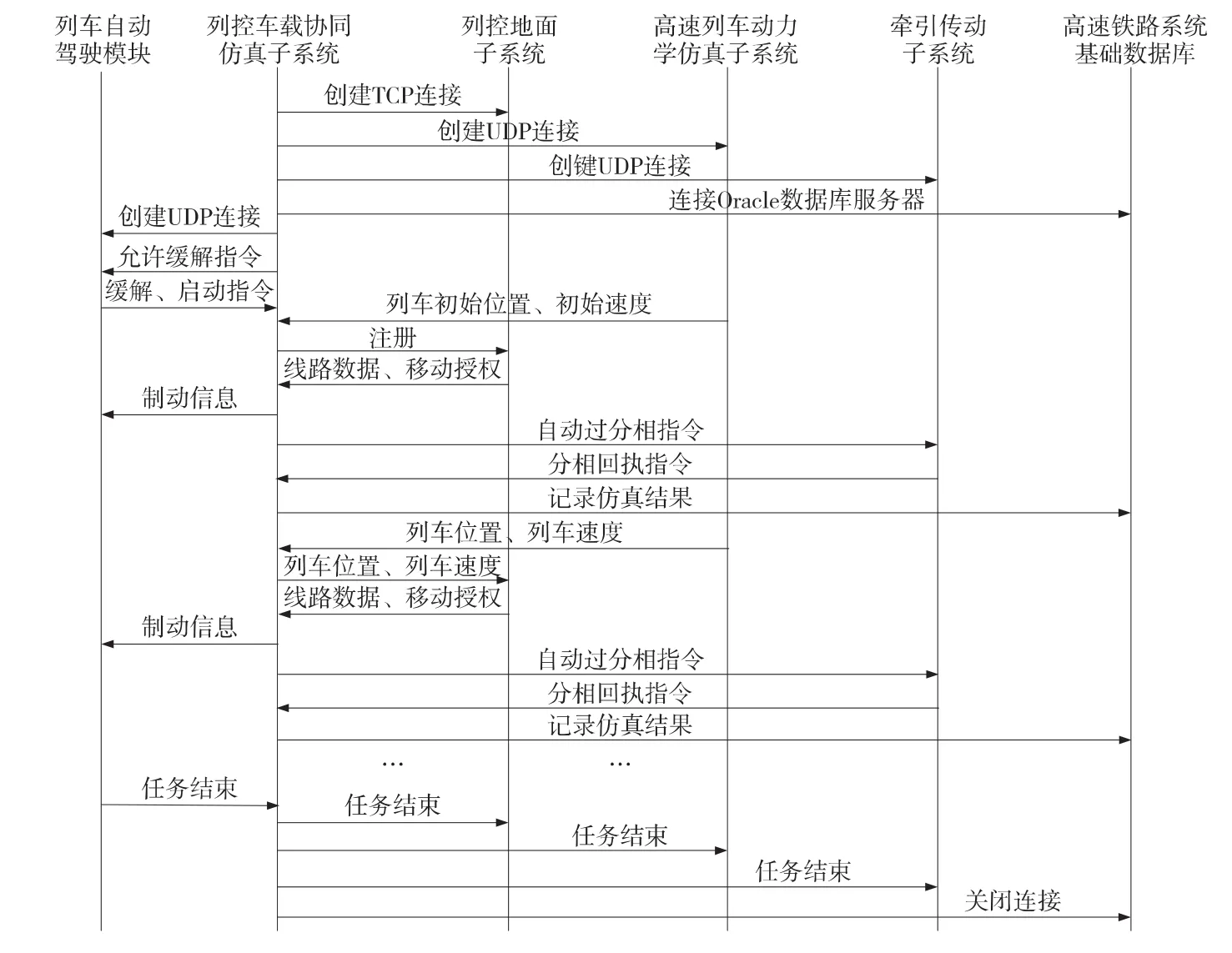
圖5 協同仿真時序圖
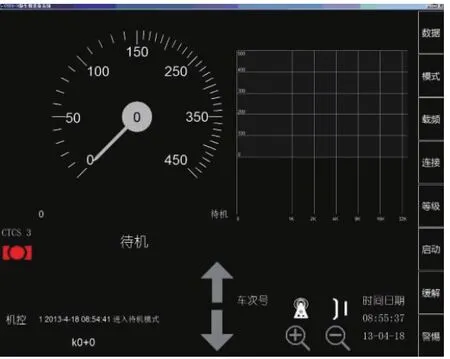
圖6 車載DMI界面顯示
本文以“鄭西客運專線”的實際數據為基礎進行協同仿真。
3.1 追蹤運行測試
測試結果如圖7。圖7(a)為追蹤列車G1005,圖7(b)為前行列車 G1003,從地面子系統界面(圖7(c))可以看出,G1005的目標點為G1003所在閉塞分區的始端K965+768。
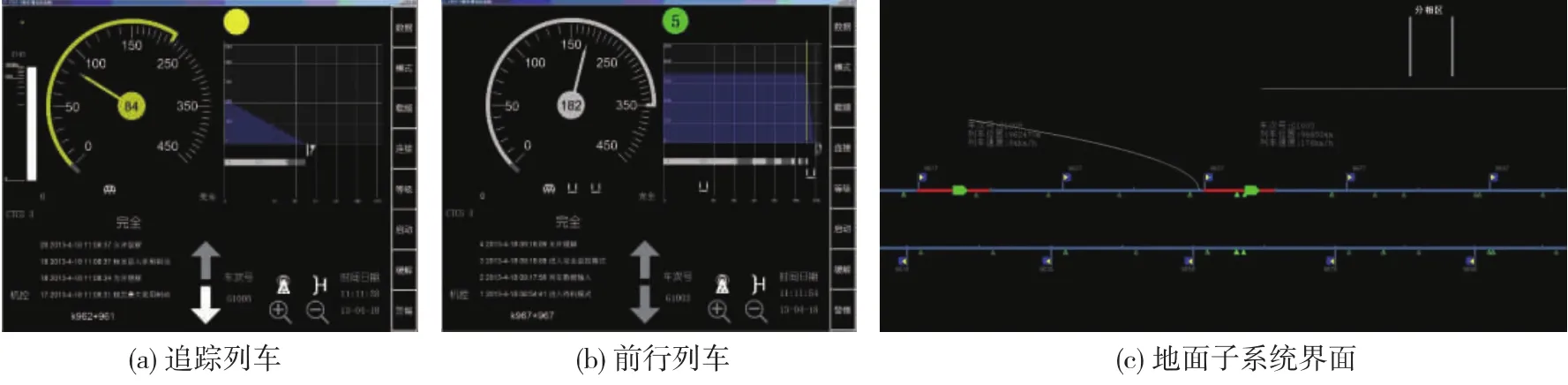
圖7 列車追蹤運行
3.2 故障設置
設置GSM-R故障或RBC故障,仿真結果如圖8所示。GSM-R/RBC故障前,列車處于CTCS3級運行,坐標區用藍色陰影顯示最限制速度曲線,見圖8(a);故障后,車載協同仿真子系統進入CTCS2級部分監控模式,坐標區顯示常用制動曲線和緊急制動曲線,如圖8(b)所示。
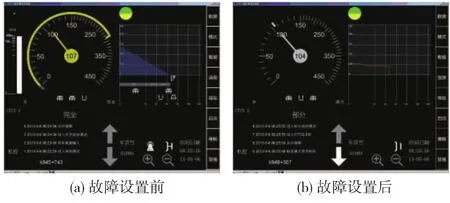
圖8 GSM-R故障/RBC故障設置
3.3 臨時限速設置
在K940+000~K942+000間設置限速值為80 km/h的臨時限速,仿真結果如圖9所示。從速度表盤可以看出,臨時限速設置前(圖9(a)),當前允許速度是350 km/h,目標速度為0 km/h,坐標區顯示目標點為移動授權終點;設置臨時限速后(圖9(b)),當前允許速度為200 km/h,目標速度為80 km/h,目標點為臨時限速的起點。
3.4 仿真結果記錄
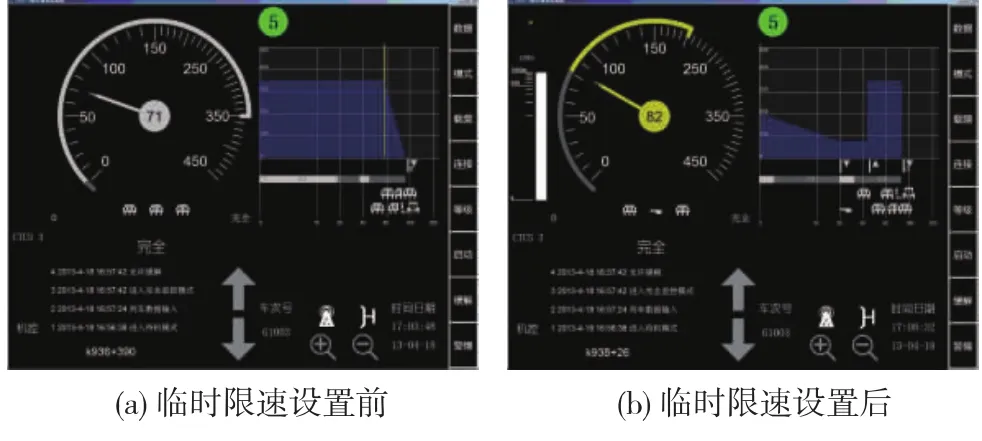
圖9 臨時限速設置
仿真結果數據在基礎數據庫中的實時記錄見圖10。每隔1 s,車載仿真子系統向數據庫記錄一次仿真結果數據,從圖10所示的數據庫記錄表的表頭可以看出,記錄數據包括車次號(DMI_ID),線路名(INLINENAME),制動預警時間圖標編碼(C_INT_BM)等。
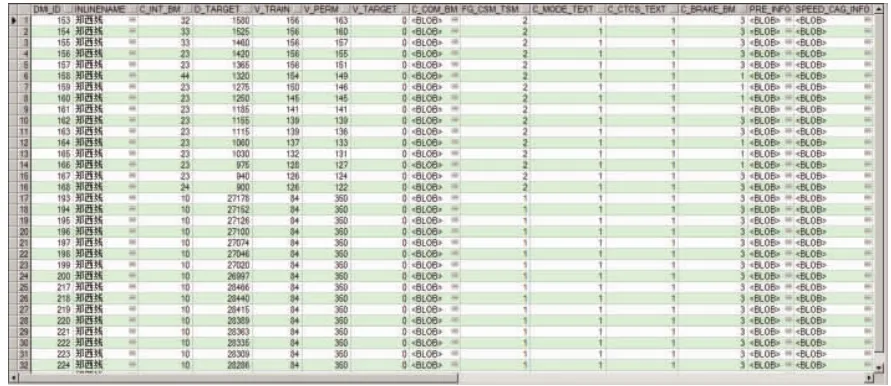
圖10 數據庫中的仿真數據記錄
4 結論
在高速鐵路耦合大系統的平臺下,研究列控車載協同仿真子系統與高速列車、牽引供電和鐵路線路等子系統間的耦合關系,設計并實現了列控車載協同仿真子系統。本文以“鄭西客運專線”實際線路數據為基礎進行列車追蹤、故障設置、臨時限速設置等仿真實驗,驗證了該子系統能夠實現與高速列車動力學、牽引傳動和自動駕駛等各專業仿真子系統的可靠數據交互,能在復雜環境下保證列車安全運行,可為高速鐵路耦合大系統進行高速鐵路安全性仿真驗證提供有力的保障。
[1]張衛華,張曙光.高速列車耦合大系統動力學及服役模擬[J].西南交通大學學報,2008,43(2):147-152.
[2]YANG Xiaojuan.The Development and Innovative Direction of Train Control System[C]∥the 2nd International Conference on Intelligent Control and Information Processing,Harbin,July 25-28,2011:442-445.
[3]蔣明.高速鐵路牽引供電與受電系統建模與仿真[D].長沙:中南大學,2012.
[4]龍許友,時瑾,王英杰,等.高速鐵路線路線形動力仿真及乘坐舒適度評價[J].鐵道科學與工程學報,2012,9(3):26-33.
[5]Hairong Dong,Bin Ning,Baigen Cai,et al.Automatic Train Control System Development and Simulation for High-Speed Railways[J].IEEE circuits and systems magazine,2010(2):6-18.
[6]HU Xiaohui,ZHOU Xingshe,DONG Jianwu.A Designing Method of Simulation Software for Chinese Train Control System Based on Hybrid Software Agent Model[C]//Proceedings of the Fifth International Conference on Machine Learning and Cybernetics.Dalian,2006:148-153.
[7]郭寧.CTCS2級列控系統超速防護仿真研究[D].成都:西南交通大學,2008.
[8]徐麗,張勇.CTCS3級列控系統車載設備仿真子系統的設計與實現[J].鐵路計算機應用,2008,17(5):8-11.
[9]王黎.CTCS3級列控系統車載子系統仿真研究[D].成都:西南交通大學,2009.
[10]修桂生.CTCS-3級車載設備測試平臺——列車運行仿真器的建模與實現[D].北京:北京交通大學,2010.
[11]徐麗.CTCS3列控系統仿真測試平臺——車載設備仿真子系統的研究[D].北京:北京交通大學,2007.
[12]張仕雄.CTCS-3級列控系統測試序列合理性驗證的研究[J].鐵道標準設計,2012,12:103-105.
[13]中華人民共和國鐵道部.運基信號[2008]670號 CTCS-3級列控車載設備人機界面(DMI)顯示規范(V1.0)[S].北京:中國鐵道出版社,2008.
[14]上官偉,蔡伯根,王晶晶,等.時速250 km以上高速列車制動模式曲線算法[J].交通運輸工程學報,2011,11(3):41-46.
[15]郭寧,楊巍,吳亮.CTCS2級列車運行控制系統超速防護仿真研究[J].交通運輸工程與信息學報,2007,5(4):122-126.
[16]Booth PD.Intermittent and continuous automatic train protection[C]∥IET Professional Development Course on Railway Signaling and Control Systems,Birmingham,UK,2010:86-113.
