MEH(小汽輪機電液控制)改造設計
2013-11-30 03:13:28楊傳龍郭紅玲
山東工業技術 2013年9期
關鍵詞:閥門
楊傳龍 郭紅玲
(1.日照鋼鐵有限公司,山東 日照 276806;2.日照市工業學校,山東 日照 276800)
MEH是指在鍋爐給水泵中采用汽動給水泵的自動調節系統,由于用小汽輪機作為原動機去拖動給水泵,實現電廠的節能降耗,許多電廠正在進行MEH改造。但目前所在熱電廠的小機只能現場手動、半自動控制,因此要設計一改造方案來實現遠程自動控制功能:1)遠程手動控制;2)遠程自動控制;3)遠方自動/手動打閘;4)超速遮斷保護(ETS)。
1 建模
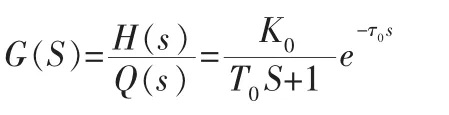
T0=R2C:過程時間常數,R2=K0:過程放大系數,τ0為過程的純時滯。階躍響應和模擬圖,如圖1。

圖1
電動機的轉速與Q1的大小成正相關,因此轉速的調整與液位的變化也為帶有時滯的正相關。
2 串行策略
由數學模型建立相應的串行控制策略,如下圖2。

圖2
控制效果分析:由于采用了副回路,改善了被控過程的動態特性,副回路調節不必追求太高的超調量,所以采用了PI調節,副回路采用較大比例系數時,工作頻率高,對進入副回路的干擾有很強的克服能力,對負荷或操作條件的強烈變化有較強的適應能力。
3 PID整定
PID整定多采用工程衰減曲線法(4:1),分兩步整定:
1>在工況穩定運行條件下,主副調節器具置于純比例作用,主調比例度δ1置于100%,用4:1衰減曲線法整定副調節器參數得:δ2S=32%,T2S=15S
2>將副調節P置于32%,T置于15S,用相同的整定方法,將主調節器比例由大到小逐漸調節,求得:δ1S=50%,T1S=7min
3>根據上述參數,運用4:1衰減曲線法查表得:
主調節器 (n):P:δ1=0.8δ1S=40%,I:T1=0.3 T1S=2.1min,D:TD=0.1 T1S=0.7min
副調節器(Q):P:δ2=1.2δ2S=38.4%,I:T2=0.5T2S=7.5s
4 電氣自動化遠程實現
測控量與傳感器變送器的選擇:被測量有轉速、流量、液位、溫度、壓力補償等,主控制為閥門開度。
本廠選用常用磁電轉速傳感器(轉速信號變送為4~20mA)和LWGQ型渦輪流量傳感器,開環手動現場調節器,步進電動機控制閥門開度調節汽動給水泵,新華DCS控制系統有DPU冗余和模入端子冗余,工程師站有XDPS軟件(可形象設計圖案控制組態)。
因此可采用原有現場電氣接線與DCS控制系統互聯,完成改造設計。
現場控制接線圖3:

圖3
電氣接線圖
<1>調速器部分
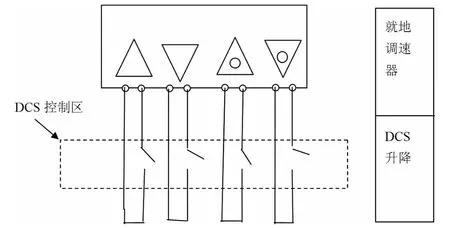
圖4
<2>危急遮斷

圖5

圖6 DCS閉環控制程序
開環/閉環控制程序(如圖6)
經過改造后的MEH基本實現了程控/就地控制。遠程手動良好,但由于PID整定后,及工況遷移等原因,使用一段時間后,存在自控偏差較大現象。常見故障如閥門振動大,過靈敏,或關閉不嚴之狀,所以需必要的參數重整定;還有人為操作順序不合理造成的連鎖保護,需要將投入、保護信號復位后,方可繼續使用。
[1]吳勤勤.控制儀表及裝置[M].化學工業出版社,2002.
[2]侯志林.過程控制與自動化儀表[M].兵器工業出版社,1989.
[3][日]吉野新治.電廠技術[M].中國計量出版社,1993.
[4]王慶有.光電技術[M].電子工業出版社,2005.
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:10
流程工業(2022年3期)2022-06-23 09:41:08
流程工業(2022年3期)2022-06-23 09:41:02
流程工業(2022年3期)2022-06-23 09:40:50
流程工業(2022年5期)2022-06-23 07:19:22
流程工業(2022年5期)2022-06-23 07:19:16
中國核電(2021年3期)2021-08-13 08:57:02
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
智富時代(2018年5期)2018-07-18 17:52:04