基于視頻圖像的車速檢測研究
2013-12-03 12:16:32劉偉
山東交通學院學報 2013年4期
關鍵詞:檢測
劉 偉
(長安大學 汽車學院,陜西 西安 710064)
車速檢測在交通事故鑒定中占有重要地位,傳統的車速計算方法只能測定車輛碰撞時的速度,而汽車碰撞前駕駛員采取制動措施使車速下降,導致所測車速偏低,影響事故鑒定結果[1]。針對這一情況,本文提出一種新的基于視頻圖像的車速檢測方法,該方法能準確的測出車輛在碰撞前的行駛速度[2],可作為交通事故鑒定的依據。該系統簡單、直觀、誤差小,具有很強的實用性。其算法流程如圖1所示[3]。
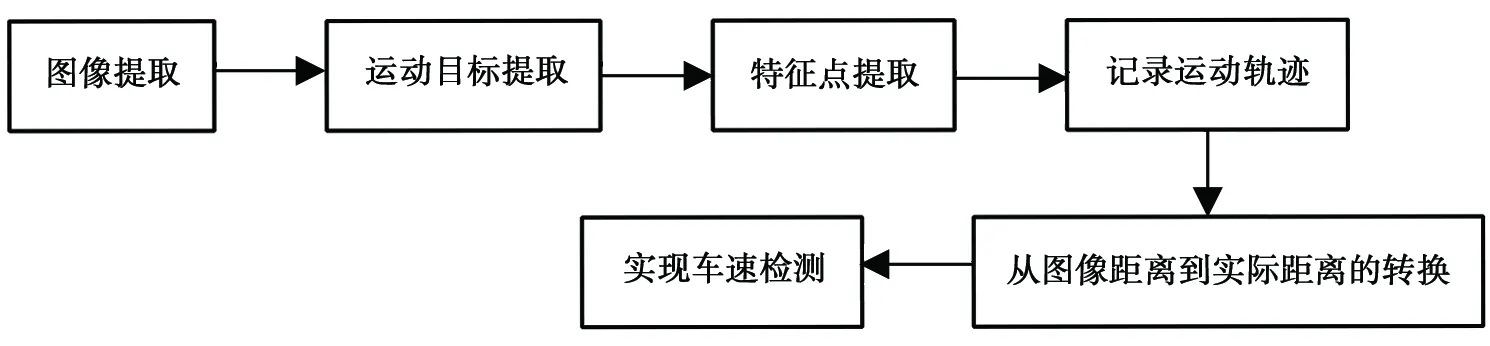
圖1 車速檢測算法流程
1 運動目標提取
運動目標提取是指在圖像中提取感興趣的區域(本文指車輛),并進行處理,使圖像變得簡單,減少數據量。
1.1 交互式目標提取
目前,提取運動目標的方法有光流法、背景差分法、幀間差分法等。
1)光流法。直接計算運動信息,對車輛的顏色不敏感,能容忍尺度的變化。但計算量大、實時性差,需要特定硬件支持。
2)背景差分法。這種方法易于實時處理,能檢測出靜止車輛。但對長時間光線變化敏感,背景重建比較困難,不適用于動態背景下的運動信息提取。
3)幀間差分法。對視覺場內的光線逐步變化不敏感,易于實時處理,可用于動態背景下運動信息提取。但對靜止車輛無法檢測,對運動車輛速度敏感,容易產生空洞現象。
本文在分析背景差分法和幀間差分法的基礎上提出了一種交互式提取法,既能獲得完整圖像,又能消除背景光線等因素的干擾。其步驟為:把當前幀減去背景幀記為b1,把第二幀減去背景幀記為b2,對b1、b2分別進行預處理,再將b2與b1相減,通過閾值法提取運動目標,記為C21[4]。這種交互式的運動目標提取方法是人工選取所需運動目標的區域,再在這個區域中對圖像進行處理,進而提取運動目標。這樣做的優點在于選擇性的提取運動目標不僅能排除環境變化的干擾,而且能排除運動車輛的陰影、燈光、附近接近物體的影響。

圖2 區域選擇
圖2中的四邊形為選取的需要進行圖像處理的區域。從圖2交互式提取的圖像可以看出,該方法能夠任意提取所需的運動目標,并且不會帶入其它的運動物體(如圖2中的摩托車)對圖像的影響,這點對運動物體特征點的選取很重要。
1.2 特征點選取
為了獲得圖像中運動目標的運動軌跡,需要提取其特征點。特征點的提取是指在n幀圖像中,能在運動物體上選取特定的點以表示該物體的位置。選取運動目標的質心作為運動目標的特征點[5]。

圖3 交互式提取圖像
由于拍攝所得的交通事故圖像是連續的,運動物體也是快速運動的,假定相鄰幀圖像上的物體位置變化不大,并且它的運動方向和面積都變化不大。交互式提取運動車輛后,求取車輛質心。圖3中白色區域內的點為該運動目標的特征點(質心)。
質心O坐標為
式中 wn為總像素數;f(x,y)為像素點坐標。
2 記錄運動軌跡
計算車速時,需要得到汽車的運動軌跡,以便于分析車輛速度方向的改變,在此之前,要先得到車輛在圖像上的運動軌跡[6]。
提取運動車輛的特征點,得到一組n幀圖像中運動目標質心的坐標:{x=x1,x2,…,xn},{y=y1,y2,…,yn}。
可用直線y=a+bx來逼近這些點,采用最小二乘法求出回歸系數b和回歸常數a[7]。
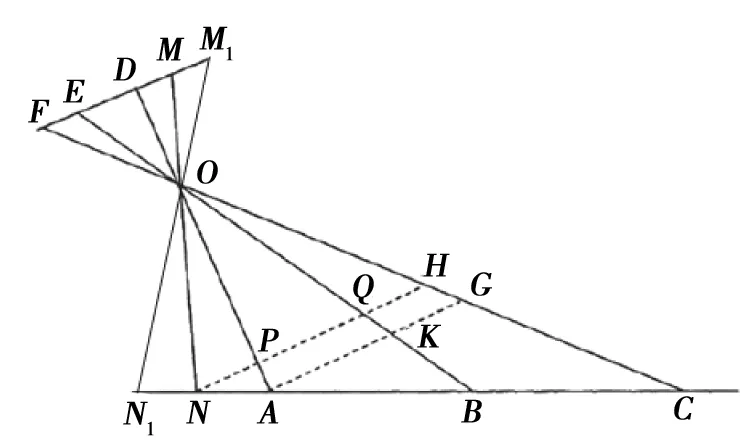
圖4 透視關系推導圖
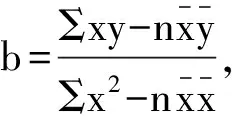
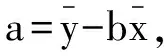
有
(1)
方程(1)為所求的線性回歸方程。圖4中的直線MF為車輛在視頻上的運動軌跡[8-9]。
3 圖像距離到實際距離的轉換
處理幀圖片得到的只是車輛在視頻上所移動的像素距離,而不是平面坐標系中以長度單位表示的距離,因此需要將圖像坐標轉換到平面坐標,得到平面坐標中的實際距離,這就要進行攝像機標定,進而求取實際距離[10]。

圖5 透視關系推導圖
采用攝影機中心透視成像原理,原理圖如圖5所示。
圖4中D、E、F 3點分別為視頻上的3個點,對應的實際道路路面為A、B、C,在視頻上找點M,M點所對應的路面上的點為N,NA記為所求的實際距離[11]。NA的計算公式有4種情況。
1)M點在D點右邊時,有
(2)
2)M點在F點左邊時,有
(3)
3)M點在D、E點之間時,有
(4)
4)M點在E、F點之間時,有
(5)
經過計算和實驗驗證發現式(3)和式(5)是錯誤的,式(3)、(5)應該與式(2)相同,得到M點在D點右邊和M點在D、E點之間兩種情況。
攝像機的標定條件為:在平面坐標中,車輛的運動軌跡是直線或近似直線,并且在這條直線上3個標定點(D、E、F)對應的實際間距相等且為已知(即DE和EF對應的實際距離AB和BC已知)。而當車輛運動軌跡是曲線時,為便于計算,需要對相互垂直的2個方向進行標定。
D、E、F點組成的直線稱為標定線,標定線可以選取車體本身、道路標記線、人行橫道線、其它距離已知的物體或標記等。根據該原理若車輛在第t1時刻位于N1處,在第t2時刻位于N處,則車輛在t1、t2時刻之間的行駛速度為
υ=|AN1-AN|/|t2-t1|.
(6)
4 實驗結果及分析
4.1 事故背景
4.1.1 基本情況
某地某一時刻,轎車甲和摩托車乙在十字路口發生碰撞事故。要求根據事故錄像、事故現場圖對甲乙兩車進入交叉口時的行駛速度進行鑒定。
4.1.2 通常算法
該監控視頻幀率f=25幀/s。轎車由視頻畫面左側進入監控范圍開始,轎車最前端、最后端連續經過視頻畫面同一點的視頻幀數n約為3~3.5幀,該車身長度L=3.895 m,由式υ=3.6L/(n/f),計算出該車在事故發生前的行駛速度約為100.2~116.9 km/h。
4.2 本文算法
通過Matlab GUI界面實現輸入圖片、數據,進行圖片處理與運動軌跡擬合,求得車輛的行駛速度。
圖6為第1幀到第n幀特征點提取,圖7為運動軌跡擬合曲線。
由式(6)得
v=3.6s/t,
( 7)
式中 s為相鄰幀之間的距離,m;t為相鄰幀的時間間隔,s。

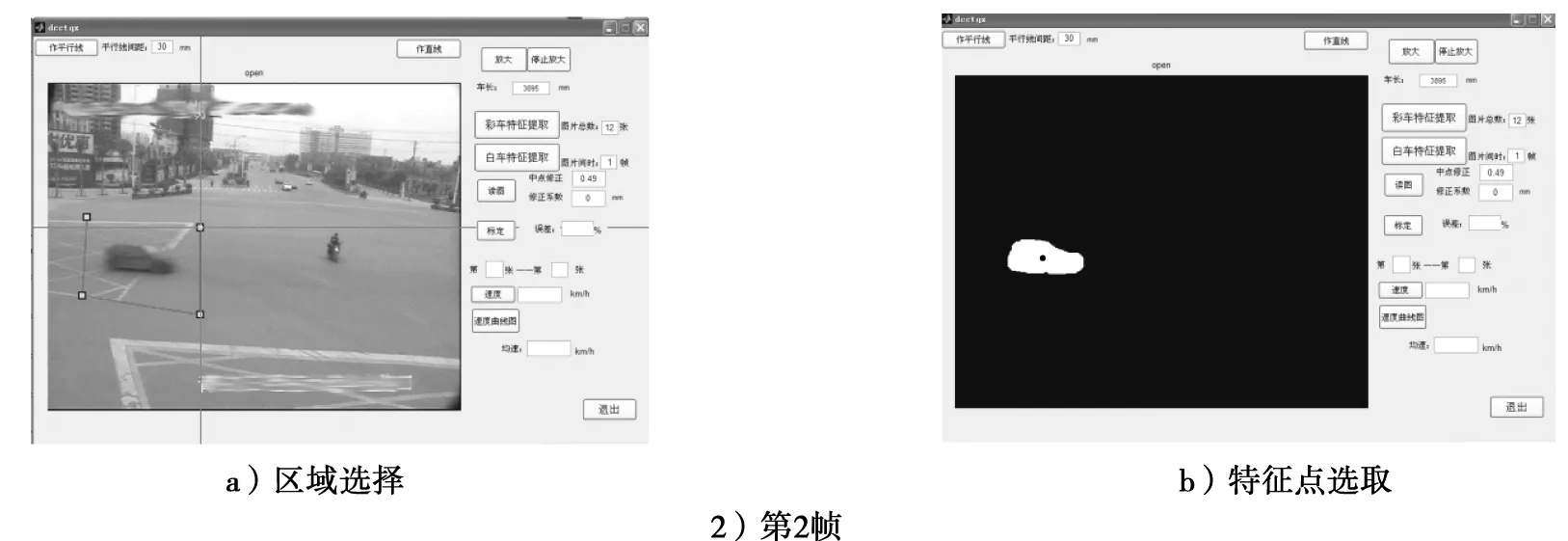

圖6 特征點的提取
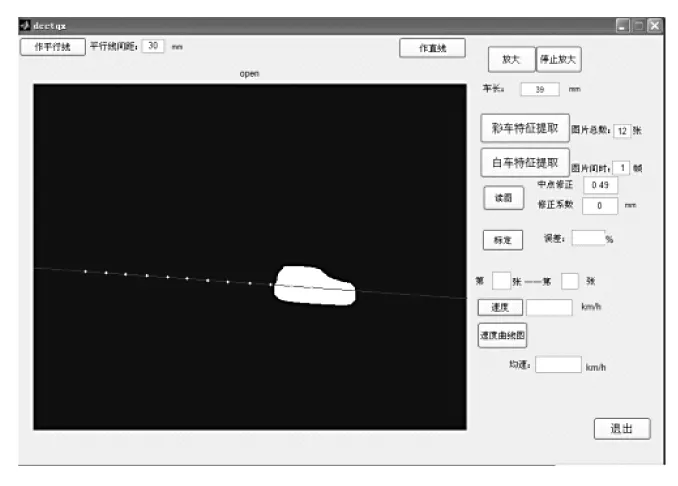
圖7 運動軌跡擬合曲線
根據s不同,通過式(7)可以求出任意兩幀之間的速度。
為了得到汽車在碰撞前的準確車速,對車輛行駛至第1幀到第11幀的相鄰幀之間的速度進行了2次測速。
第1次測速:車輛行駛至第1~2、2~3、3~4、4~5、5~6、6~7、7~8、8~9、9~10、10~11幀間的速度分別為:103.0,104.4,104.2,96.7,95.6,95.0,94.6,93.8,91.1,88.9 km/h。
第2次測速:車輛行駛至第1~2、2~3、3~4、4~5、5~6、6~7、7~8、8~9、9~10、10~11幀間的速度分別為:107.0,107.5,107.2,99.5,98.3,97.6,97.1,96.2,93.4,91.2 km/h。
4.3 結果分析
第1次測速得到的平均速度為96.8 km/h,第2次測速得到的平均速度為99.5 km/h。把2次得到的測量值取平均值,可得到汽車在碰撞前理論上的真實車速為97.3 km/h。因此,汽車在前幾幀時處于明顯的超速狀態。
鑒定結果為:該車輛在視頻中第1幀至第11幀的平均速度為96.8~99.5 km/h。最高速度為104.4~107.5 km/h。與傳統視頻法鑒定計算得出的結果相比,基于視頻圖像計算車速的方法精度更高,取值范圍更小,誤差也更小。
參考文獻:
[1]張新海.交通事故車速測算方法探析[J].刑事技術,2008(4):33-36.
[2]馮浩,潘少猷,陳建國.基于視頻的車速鑒定方法[J].中國司法鑒定,2009(5):45-47.
[3]袁泉,張高強,郭銳,等.交通事故車速分析理論方法的研究進展[J].交通運輸工程與信息學報,2009,7(2):22-25.
[4]李剛,邱尚斌,林凌,等.基于背景差法和幀間差法的運動目標檢測方法[J].儀器儀表學報,2006,27(8):962-966.
[5]王光玲.基于運動目標檢測與跟蹤視頻測速算法的研究[D].山西:太原理工大學,2009.
[6]彭雅芳,呂植勇.一種基于車輛運動軌跡的車速估算方法[J].計算機與數字工程,2008,36(11):134-137.
[7]張重德,張崇巍.一種提高視頻車速檢測精度的方法[J].上海交通大學學報,2010,44(10):44-46.
[8]于艷玲.視頻檢測系統中的車速檢測技術研究[D].西安:長安大學,2009.
[9]伍友龍.基于圖像分析的高速公路交通事件檢測算法研究[D].湖南:長沙理工大學,2005.
[10]王駿飛,羅大庸.一種新的基于視頻技術的車速檢測方案[J].自動化技術與應用,2010,29 (3):35-37.
[11]李欣菊.攝像機標定算法研究[D].武漢:中國科學院自動化研究所,2003.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
