一種滾珠絲杠扭轉振動模態的測量與分析方法
2013-12-05 06:57:42王國賢曹小華
中國機械工程 2013年23期
周 勇 王國賢 曹小華
武漢理工大學,武漢,430063
0 引言
滾珠絲杠副進給驅動是目前數控機床上應用最廣泛的進給驅動設備,相對直線電機驅動,它具有成本低、易于控制、維護簡單等優點。高速加工技術要求機床的進給驅動機構具有高速度和高加速度,然而,細長的絲杠在高速、高加速度運行過程中會引起扭轉、軸向和彎曲變形及振動,這種變形和振動會影響零件的加工質量、加劇刀具磨損甚至導致控制系統的不穩定,也限制了機床進給速度和加速度的進一步提高。
在滾珠絲杠副驅動中,滾珠絲杠的扭轉振動是實現高帶寬和高定位精度的決定性影響因素之一[1-3]。由于滾珠絲杠副進給驅動系統一般采用半閉環控制,其位置和速度反饋是從電機碼盤或絲杠上安裝的角度編碼器獲取的,因此,轉子-絲杠系統的扭轉振動被包含在控制系統的位置、速度控制環中。此外,在實際機床的加工過程中,工作臺的位置是不斷變化的,而且被加工件往往有很高的金屬切除量,從而不可避免地會導致控制性能上的偏差,進而影響到機床的加工精度。因此,有必要對滾珠絲杠副進給驅動機構的扭轉振動模態進行精確分析,充分考慮其動力學行為對控制的影響,進而對控制系統進行有效的補償。目前,對于滾珠絲杠扭轉振動模態的研究通常采用有限元或集中參數等方法建立其動力學模型[4-10],但是由于滾珠絲杠副進給驅動機構的結構復雜性,僅僅依靠理論分析很難得到精確結果,還必須結合必要的實驗研究。
在滾珠絲杠副進給驅動系統中,電機驅動力矩難以精確測量,而且絲杠上也難以布置多個測點,因此,對其扭轉振動模態的測量很難采用常規的通過測量多點激勵-響應的方式進行。本文提出一種滾珠絲杠扭轉振動模態測量與分析方法:在絲杠尾端安裝一個旋轉編碼器,測量電機碼盤和尾端旋轉編碼器的角加速度信號,對測量信號進行頻域分析,并結合滾珠絲杠副進給驅動機構扭轉動力學理論計算模型,獲得其扭轉振動模態。研究結果可為滾珠絲杠副進給驅動扭轉動力學分析及其高帶寬控制提供科學依據。
1 滾珠絲杠副進給驅動機構扭轉動力學模型
圖1為本文所研究的滾珠絲杠副進給驅動機構轉子-絲杠系統的示意圖。采用有限元方法,將轉子-絲杠系統劃分為若干個扭轉單元。由于聯軸器的剛度是非均勻分布的,故將聯軸器按輸入端和輸出端分開,分別建立有限元單元,輸入端和輸出端之間的扭轉剛度采用聯軸器的標稱剛度。對于工作臺和螺母等移動部件,忽略工作臺與滑軌之間的接觸剛度的影響,將其作為集中質量來考慮,并按照動能相等的原則,折算到絲杠軸上作為等效慣量。
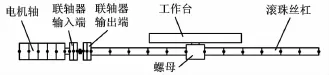
圖1 轉子-絲杠扭轉系統有限元-集中參數模型
對于均質桿單元,利用形函數方法,可得到其單元慣量矩陣[7]:

式中,l為單元的長度;jl為桿單元的單位長度轉動慣量;下標i表示節點編號。
桿單元的單元剛度矩陣為

式中,G為桿單元的剪切彈性模量;Ip為桿單元的截面極慣性矩。
對于工作臺等直線運動部件,建立扭振動力學模型時,應將它們的質量換算成等效轉動慣量,然后把它們看作慣量元件。換算的原則是保持轉換前后動能相等[11],即

式中,ω為絲杠角速度;v為移動部件速度;m為移動部件質量;JV為等效轉動慣量。
在將等效慣量轉換到滾珠絲杠對應單元上時,就將其視為絲杠上的一附加慣量元件。取絲杠導程為ξ,于是由幾何關系可得

將式(4)代入到式(3)后得移動部件的等效慣量:

將各單元所作的分析結果進行綜合,分別對單元慣量矩陣和單元剛度矩陣進行組集,可得到全系統整體慣量矩陣M和整體剛度矩陣K。
聯軸器扭轉剛度采用集中剛度kct,對其組集的方法如下:取kct相鄰的兩個單元組成的子系統,如圖2所示,則子系統在t時刻的變形勢能為
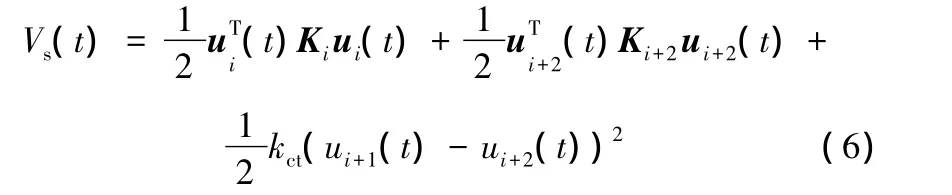
式中,ui(t)=[ui(t)ui+1(t)]T,ui+j(t)(j=0,1,2,3)為單元節點的角位移。
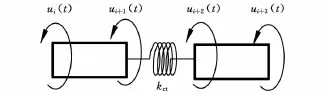
圖2 考慮聯軸器集中剛度的單元子系統
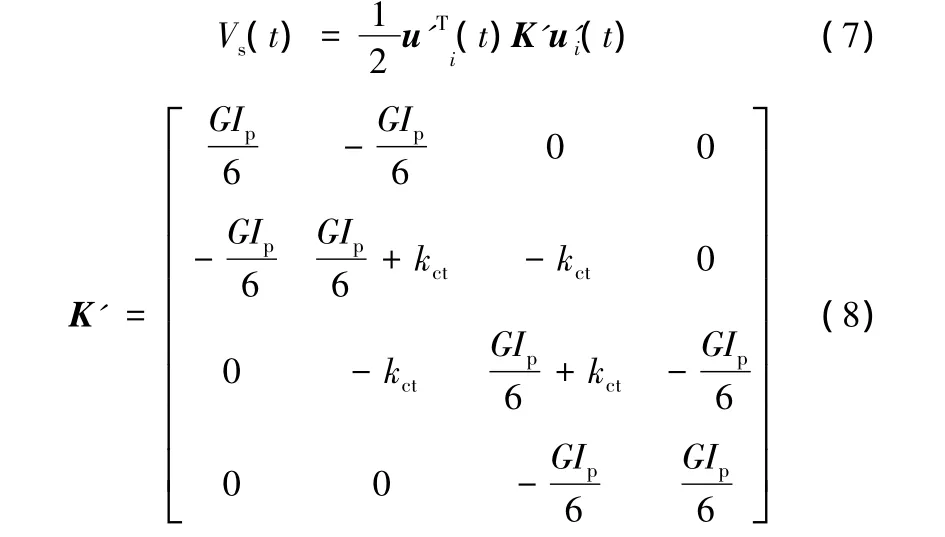
取角位移列矢量u'i(t)=[ui(t)ui+1(t)ui+2(t)ui+3(t)]T,則式(6)可變為
以各獨立節點的角位移作為其動力系統的廣義坐標,記作qi,相應廣義坐標的廣義力記為Qi,i=1,2,…,n(n為考慮系統邊界條件后的獨立變形節點個數)。則由拉格朗日動力學方程可得到全系統的動力學方程:

對該動力學方程進行求解,即可得到滾珠絲杠副驅動機構扭轉振動的各階模態固有頻率和振型。但是,由于滾珠絲杠上開有螺旋槽,其轉動慣量和剛度的計算不能簡單按照直圓軸處理,只能確定它們的取值在一定的范圍之內,因而根據該方程通過仿真進行求解,需要結合實驗對其參數進行適當調整。當采用一組取值合理的參數組合,經過模擬試算的結果與實驗結果相吻合時,模擬計算結果和試驗結果皆有效。
2 扭轉振動測量裝置及方法
本文測量裝置如圖3所示,主要包括滾珠絲杠副進給驅動系統(含數控裝置、伺服驅動器、伺服電機、聯軸器、滾珠絲杠、螺母、工作臺等)、旋轉編碼器、計數卡以及計算機等。通過計數卡可實時測量安裝在絲杠尾端的旋轉編碼器信號和伺服電機碼盤信號。旋轉編碼器為德國Heidenhain公司制造的ERN120系列,其物理分辨率為5000脈沖每轉,經4倍頻后可達到20 000脈沖每轉。伺服電機碼盤的分辨率為6000脈沖每轉,經4倍頻后可達到24 000脈沖每轉。計數卡為阿爾泰科技制造的PCI2394型4軸正交編碼器和計數器卡,通過PCI接口安裝在計算機內,可同時測量4個通道的脈沖/方向信號。測量軟件基于實時Linux系統開發,計數采樣頻率可達到10kHz。

圖3 測量裝置示意圖
測量時,首先打開測量軟件,設置采樣周期、鎖存數據頻率、計數通道的個數等;然后進入測量等待狀態,數控系統指令工作臺按照一定的位置、速度運動,當運動開始時,電機碼盤和旋轉編碼器隨電機轉子-絲杠系統一起旋轉,計數卡的計數器模塊被觸發并開始按照設定的采樣周期對碼盤和旋轉編碼器脈沖信號進行計數,當程序計數完成后將自動停止計數(在采樣周期低的時候可以通過鍵盤輸入中止程序);最后執行保存數據操作,即將測量數據保存至計算機,所測得的數據為一定時間間隔的脈沖個數,根據碼盤或旋轉編碼器的分辨率可得到實際的轉角值,由于是按照一定的采樣周期計數,故角速度和角加速度可通過差分運算得到。
絲杠的扭轉振動是在絲杠大位移旋轉運動過程中同時發生的運動現象,對于測量信號,需要消除絲杠大位移運動的影響。可截取工作臺勻速運動段的角位移數據,并經兩次差分運算后得到角加速度信號,則該加速度信號包含扭轉振動信號且理論上平均加速度為零。對不同測點信號作互功率譜分析,可反映兩個信號在頻域中所得兩種譜的共同成分及其相位差關系等。為抑制噪聲和測量誤差影響,可對同一測點取兩次測量信號作互功率譜分析,得到該測點振動信號的頻域特征。
由于滾珠絲杠上難以布置多個測點,通過兩個測點僅能得到扭轉振動的頻率信息,而無法得到其振動階次和振型,又考慮到扭轉振動模態一般不是密集模態,其各階頻率值相差較大,故可通過建立的滾珠絲杠副進給驅動機構扭轉動力學模型獲得其理論扭轉振動模態固有頻率和振型,并根據測量結果對模型參數進行適當調整,當前幾階扭轉振動固有頻率與實驗結果一致時,即可認為所得到的理論模態與實際相符。
3 實例研究
本文所建立的實驗平臺見圖4,對其X軸扭轉振動模態進行了測量與分析。該實驗平臺X軸主要計算參數如表1所示。
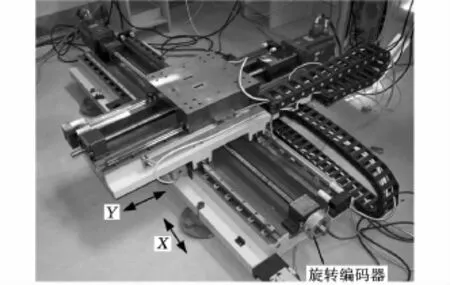
圖4 實驗平臺照片
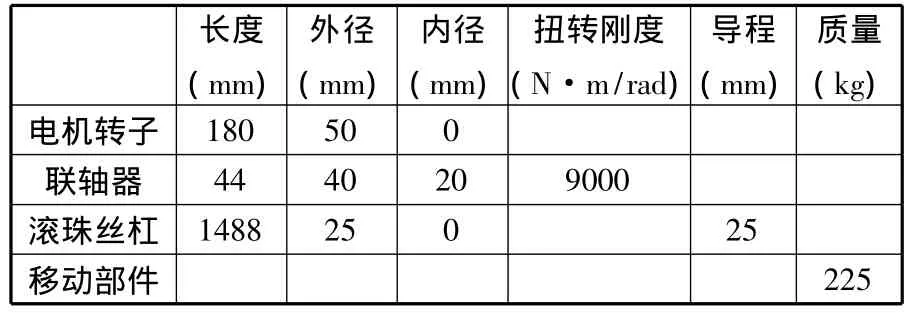
表1 X軸主要計算參數
讓X軸拖板處于絲杠中間位置,指令其作直線進給運動,取進給位移為25mm,進給速度為6000mm/min(100mm/s),加 速 度 為 0.5g(5m/s2)。截取X軸作勻速運動時的加速度信號作頻域分析,圖5所示為電機碼盤信號與旋轉編碼器信號的互功率譜幅頻曲線,圖6所示為旋轉編碼器兩次測量信號的互功率譜幅頻曲線。從圖5和圖6可以看出,主要的振動頻率為19Hz、54Hz、90Hz、352Hz和 700Hz。
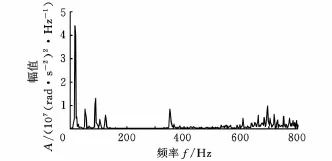
圖5 電機碼盤信號與旋轉編碼器信號的互功率譜幅頻曲線
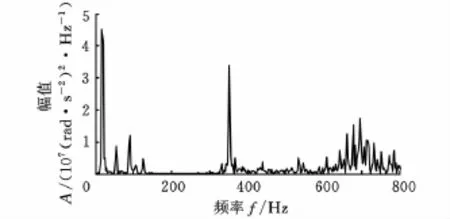
圖6 旋轉編碼器兩次測量信號的互功率譜幅頻曲線
利用MATLAB編制滾珠絲杠副進給驅動機構扭轉振動模態數值計算程序,圖7和圖8分別為第1階和第2階扭轉振動模態固有頻率和振型圖(取電機自由端振幅為1)。結合實驗測量結果與數值計算結果,可以判斷,352Hz為第1階扭轉振動固有頻率,700Hz為第2階扭轉振動固有頻率。實驗結果與數值計算結果誤差不超過1%,可以認為理論計算模態振型符合實際。需要說明的是,頻率19Hz、54Hz和90Hz可能與移動部件的軸向振動及工頻信號干擾相關,有待進一步研究。
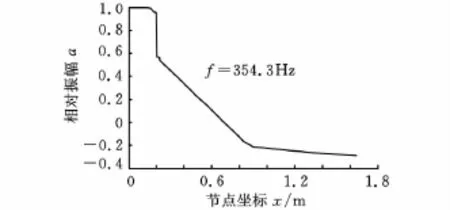
圖7 第1階扭轉振動模態振型圖
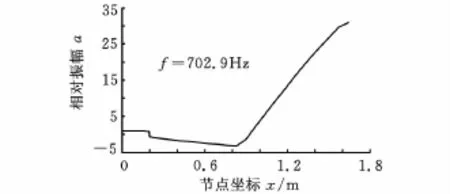
圖8 第2階扭轉振動模態振型圖
4 應用前景
本文提出的測量和分析方法可用于新產品試制過程中的滾珠絲杠副進給驅動系統的扭轉動力學分析,實現滾珠絲杠副驅動機構的結構優化,還可以直接用在進給驅動系統的控制系統之中,構建性能更優的控制方式。如滾珠絲杠副進給驅動機構的扭轉振動會限制系統的控制帶寬并劣化機床的加工質量,通常在伺服驅動器速度環中利用陷波濾波器進行補償(圖9)。利用本文提出的測量和分析方法,可準確得到系統的扭轉振動頻率及振型,為陷波濾波器的參數自適應調整及補償效果的驗證提供科學依據。
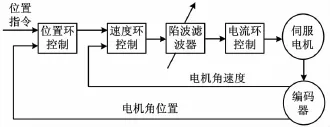
圖9 扭轉振動的陷波濾波補償
5 結語
本文提出了滾珠絲杠副驅動機構的扭轉振動模態的測量和分析方法,對安裝在滾珠絲杠尾端的高分辨率旋轉編碼器信號和伺服電機碼盤信號進行了測量和分析,并對所建立的驅動機構轉子-絲杠系統有限元-集中參數模型進行了數值計算,可精確得到系統扭轉振動模態前兩階固有頻率和振型,克服了滾珠絲杠副驅動機構的扭轉振動模態難以精確測量和分析的困難。該方法可用于滾珠絲杠副驅動機構的結構優化、控制系統陷波濾波器的參數自適應調整及補償效果的驗證等。
[1]Smith D A.Wide Bandwidth Control of High-speed Milling Machine Feed Drives[D].Gainesville:Univ.of Florida,1999.
[2]Erkorkmaz K,Kamalzadeh A.High Bandwidth Control of Ball Screw Drives[J].Annals of CIRP,2006,55(1):393-398.
[3]Kamalzadeh A,Erkorkmaz K.Accurate Tracking Controller Design for High-speed Drives[J].International Journal of Machine Tools and Manufacture,2007,47(9):1393-1400.
[4]Poignet P,Gautier M,Khalil W.Modeling,Control and Simulation of High Speed Machine Tool Axes[C]//Proceedings of IEEE International Conference on Advanced Intelligent Mechatronics.Atlanta,1999:617-622.
[5]Zaeh M F,Oertli T.Finite Element Modeling of Ball Screw Feed Drive System[J].Annals of CIRP,2004,53(1):289-292.
[6]Whalley R,Ebrahimi M,Jamil Z.The Torsional Response of Rotor Systems[J].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2005,219(4):357-380.
[7]Zhou Y,Peng F Y,Chen J H.Torsion Vibration Analysis of Lead-screw Feed Drives with Changeable Table Position and Work-piece Mass[C]//Proceedings of IEEE International Conference on Mechatronics and Automation.Harbin,2007:2194-2199.
[8]左健民,王保升,汪木蘭.數控機床進給系統剛度分析及前饋補償控制研究[J].機械科學與技術,2008,27(3):386-389.Zuo Jianmin,Wang Baosheng,Wang Mulan.Analysis and Feedforward Compensation Control of Stiffness in a CNC Machine Tool Feed System[J].Mechanical Science and Technology,2008,27(3):386-389.
[9]Okwudire C E,Altintas Y.Hybrid Modeling of Ball Screw Drives with Coupled Axial,Torsional,and Lateral Dynamics[J].ASME Journal of Mechanical Design,2009,131(7):071002.1-071002.9.
[10]范大鵬,范世珣,魯亞飛,等.數控機床高性能傳動部件控制技術的研究進展[J].中國機械工程,2011,22(11):1378-1385.Fan Dapeng,Fan Shixun,Lu Yafei,et al.Current Status of Control Research on NC Machine Transmission Component[J].ChinaMechanicalEngineering,2011,22(11):1378-1385.
[11]王祺.內燃機軸系扭轉振動[M].大連:大連理工大學出版社,1991.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
