基于MATLAB的雙閉環直流調速系統設計與仿真分析
2013-12-18 03:22:18張厚升李素玲于蘭蘭邢雪寧
山東理工大學學報(自然科學版) 2013年4期
張厚升, 李素玲, 于蘭蘭, 邢雪寧, 季 畫
(山東理工大學 電氣與電子工程學院, 山東 淄博 255091)
《電力拖動自動控制系統——運動控制系統》是高校自動化專業非常重要的一門專業課,在自動化專業中有著舉足輕重的作用.而轉速、電流雙閉環直流調速系統又是該門課程的基礎內容和重點內容,雙閉環調速系統具有調速范圍寬、穩定性好、精度高等諸多的優點[1],在理論方面和實際工程應用方面都是非常成熟的系統.因而只有熟練的掌握它、理解它,才能更好的、深入地學習教材后面的交流調速理論.然而,雙閉環直流調速系統的理論分析相對比較抽象,而且不容易理解,如果僅讓同學們在試驗過程中進行分析、理解,效果不明顯.利用MATLAB仿真軟件,讓同學們在仿真建模與調試分析的過程中,逐步深入的理解雙閉環系統的內容,然后再去實驗室做實驗,則會收到更好的效果.
本文旨在通過實例對直流雙閉環調速系統進行設計、建模、仿真和分析,做出系統的整個設計過程及仿真圖形,讓學習者能更加深刻地認識、掌握雙閉環直流調速系統,為以后的學習與應用奠定基礎.
1 雙閉環直流調速系統
1.1 雙閉環系統的組成與工作原理

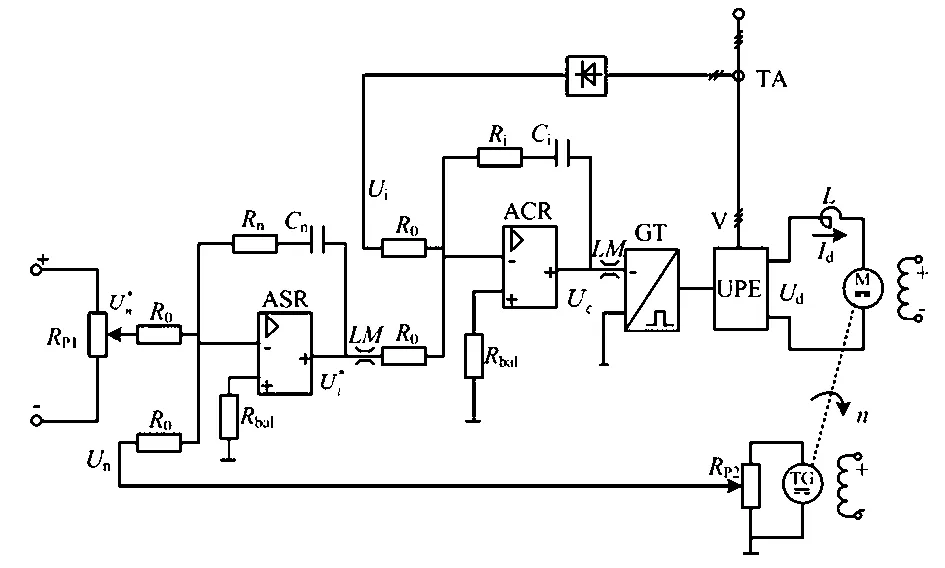
圖1 轉速、電流雙閉環直流調速系統的電路原理圖
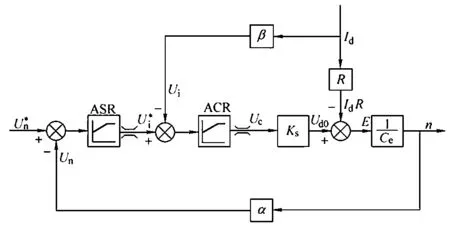
圖2 雙閉環調速系統的簡化結構圖

1.2 雙閉環直流調速系統的動態數學模型
根據前述雙閉環直流調速系統的特點,不難得出雙閉環系統的動態結構圖,如圖3所示,圖中WASR(s)為轉速調節器的傳遞函數.為了將電流反饋引出來,在雙閉環系統的動態結構圖中必須表示出電樞電流Id.
一般在實際使用的過程中,都需要在雙閉環系統的動態結構圖中增設濾波環節,該環節包括:電流濾波環節、轉速濾波環節以及兩個給定環節的濾波.由于在對雙閉環系統的電流進行檢測時,檢測信號中肯定含有交流分量,因此需要增加低通濾波環節,該環節的傳遞函數一般可用一個一階慣性環節來描述,其濾波時常Toi可以按照需要來選定,也即將電流檢測信號濾平為準則.由于濾波環節能有效地抑制反饋信號中的交流分量,但也會導致信號的滯后.為了將此滯后作用進行平衡,我們通常在給定信號的通道中增設一個具有相同的時間常數的慣性環節,該環節就稱之為給定濾波環節.他的意義可以描述為讓反饋信號與給定信號都經過一樣的時間延遲,使這兩個信號能夠在時間上配合恰當,進而可以帶來系統設計上的方便.
由于采用由測速發電機進行轉速反饋,那么在反饋電壓中勢必會含有電機的換向紋波電壓,因此也需要進行濾波,濾波的時常用Ton來表示.道理與電流環一樣,在轉速的給定環節之后也增設時間常數為Ton的給定濾波環節[1,5].所以,在實際中使用的雙閉環調速系統的動態結構圖可以描述成如圖4所示的形式.
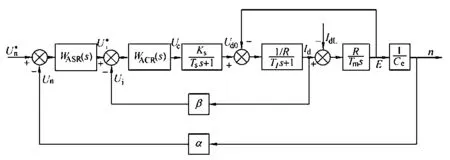
圖3 雙閉環直流調速系統的動態結構圖
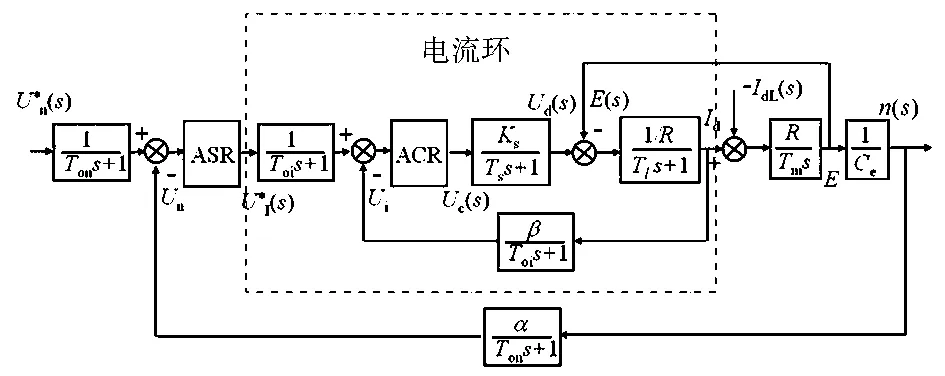
圖4 實際使用的雙閉環直流調速系統的動態結構圖
2 雙閉環直流調速系統的設計
2.1 設計參數與指標
欲設計一晶閘管供電的雙閉環直流調速系統,整流電路采用三相橋式整流電路,基本設計參數:
直流電動機額定參數:Unom=220V,Inom=136A,nnom=1 460r/min,四極,電樞電阻Ra=0.21Ω,飛輪慣量GD2=22.5N·m2,勵磁電壓Uf=220V,勵磁電流If=1.5A,整流器內阻Rrec=0.5Ω,平波電抗器Ld=20mH.
2.2 調節器參數計算
(1) ACR的參數計算
計算電流反饋系數:
計算電機轉矩時常:
0.161s
計算電機電磁時常:
0.076s
查表可得整流電路平均失控時間:Ts=0.0017s
由此可以計算出電流環的小時間常數為
T∑i=Ts+Toi=0.0017+0.002=0.0037s
依據設計要求,電流超調量σi≤5%,電流環的設計按照典型Ⅰ型系統進行設計[1,5],ACR選用PI調節器,其傳遞函數可以表示為
式中:
τi=Tl=0.0076s
(2) ASR的參數計算
計算轉速反饋系數:
為了有效的加快轉速的調節速度,轉速環的設計按照典型Ⅱ系統進行設計,在此選擇中頻段的寬度h=5,ASR的傳遞函數可以表示為
式中:
τn=hT∑n=h(2T∑i+Ton)=
5×(2×0.0037+0.001)=0.087s
3 仿真分析
3.1 仿真模型的建立
根據前文構建的轉速、電流雙閉環調速系統的動態結構圖,在MATLAB/Simulink中選擇相應元器件的仿真模塊,并將其連接,便可得到按照傳遞函數構建的雙閉環直流調速系統的仿真模型[6],如圖5(a)所示.仿真模塊的各環節參數在圖中進行了標注,按照設計要求,調節器的積分環節的限幅值取為±12,調節器的輸出限幅值取為±10.
3.2 雙閉環直流調速系統起動過程仿真分析
雙閉環的設計能使雙閉環直流調速系統獲得接近于理想的起動過程,所以在此我們借助于仿真結果著重分析一下雙閉環系統的起動過程.
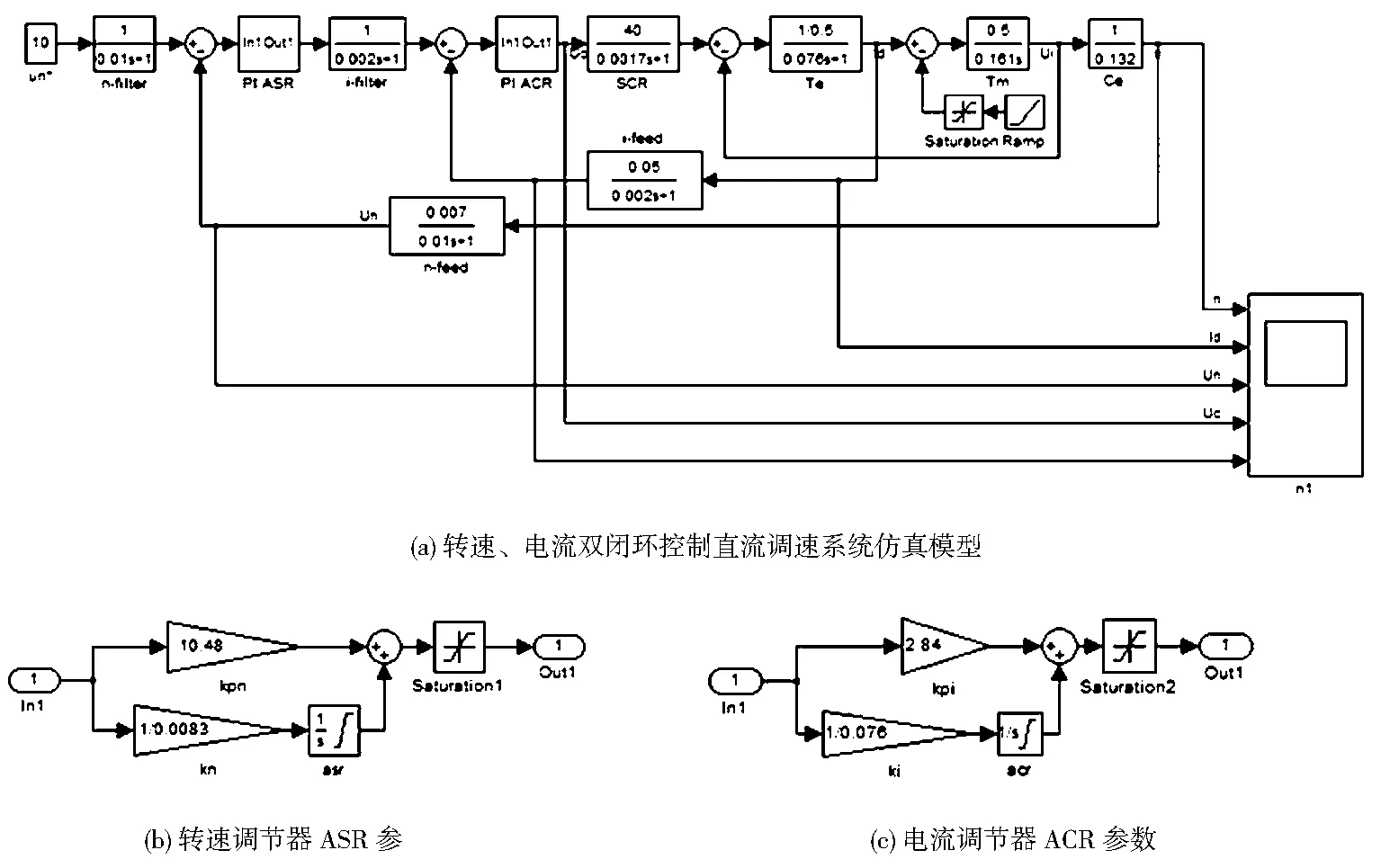
圖5 仿真模型和參數
(1) 第Ⅰ階段(0~t1時刻):稱之為電流上升階段.
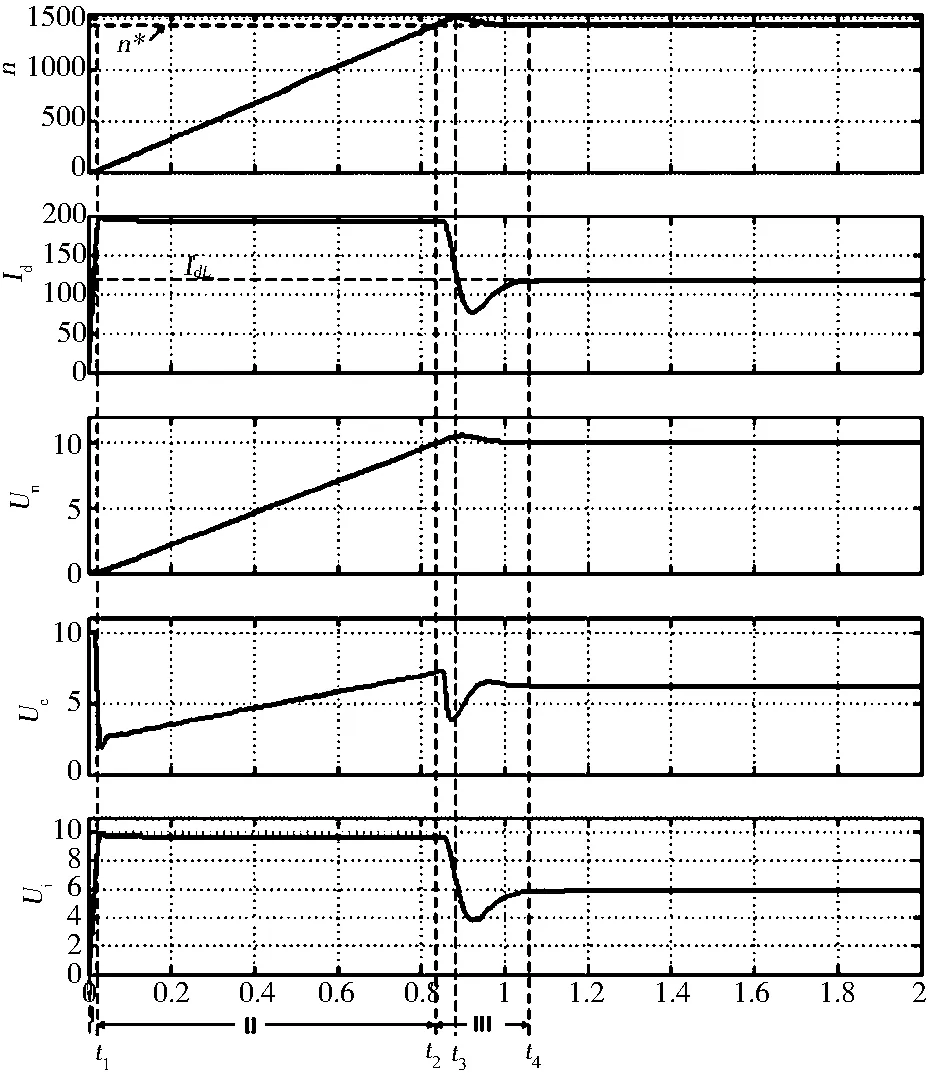
圖6 轉速、電流、反饋電壓、反饋電流、電樞電流的瞬態過程仿真圖
(2) 第Ⅱ階段(t1~t2時刻):稱之為恒流升速階段.

(3) 第Ⅲ階段(t2時刻以后):稱之為轉速調節階段.
4 結束語
本文設計了一個轉速、電流雙閉環直流調速系統,并建立了仿真模型.在該系統中,ASR和ACR都采用PI調節器,而且都帶有限幅作用,可以實現無靜差.仿真結果表明,設計的雙閉環系統的起動過程和教材中的理論分析結果是一致的,起動過程能夠實現三階段的調節作用,即電流上升、恒流升速和轉速調節,仿真模型是可行的、合理的.
[1]陳伯時.電力拖動自動控制系統——運動控制系統[M].第3版.北京:機械工業出版社, 2012.
[2]尚麗,崔鳴,陳杰. Matlab/Simulink仿真技術在雙閉環直流調速實驗教學中的應用[J]. 實驗室研究與探索, 2011, 30(1):181-185.
[3]董德智,孫馴洲. MATLAB在雙閉環直流調速控制系統教學中的應用[J].自動化與儀器儀表, 2007(4):40-43.
[4]邵雪卷,張井崗,趙志誠.雙閉環直流調速系統的飽和限幅問題[J]. 電氣電子教學學報, 2009, 31(1): 33-36.
[5]李寧,陳桂.運動控制系統[M].北京:高等教育出版社, 2008.
[6]洪乃剛.電力電子、電機控制系統的建模和仿真[M].北京:機械工業出版社, 2010.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
