基于Simulink的主動徑向轉(zhuǎn)向架控制方法研究
2013-12-23 04:39:44傅茂海王軍平
機械工程與自動化 2013年5期
關(guān)鍵詞:轉(zhuǎn)向架
王 平,傅茂海,劉 楠,金 鑫,王軍平
(西南交通大學(xué) 機械工程學(xué)院,四川 成都 610031)
0 引言
鐵道車輛轉(zhuǎn)向架需要具有良好的曲線通過性能以及橫向運行穩(wěn)定性,但是在通常情況下這兩者是相互矛盾的。增加轉(zhuǎn)向架輪對的水平定位剛度可有效提高橫向穩(wěn)定性,但曲線通過能力將會下降,輪軌橫向力增大,輪軌磨耗加劇;而降低轉(zhuǎn)向架輪對的定位剛度,實現(xiàn)輪對柔性定位,可以提高轉(zhuǎn)向架的曲線通過性能,但直線運行穩(wěn)定性降低,車輛易出現(xiàn)蛇行失穩(wěn)現(xiàn)象。因此,為了實現(xiàn)二者的兼容,提出了徑向轉(zhuǎn)向架理論方案。傳統(tǒng)的徑向轉(zhuǎn)向架一般分為自導(dǎo)向轉(zhuǎn)向架和迫導(dǎo)向轉(zhuǎn)向架,自導(dǎo)向徑向轉(zhuǎn)向架依靠輪軌之間的蠕滑力導(dǎo)向,迫導(dǎo)向轉(zhuǎn)向架是利用車輛通過曲線時車體與構(gòu)架之間的相對轉(zhuǎn)角,并通過迫導(dǎo)向機構(gòu)來控制前后輪對趨于曲線的徑向位置。但是自導(dǎo)向轉(zhuǎn)向架在半徑較小的曲線上其導(dǎo)向功能不能得到有效發(fā)揮,而迫導(dǎo)向轉(zhuǎn)向架的徑向機構(gòu)必須直接或間接地連接車體,因此其結(jié)構(gòu)相對于自導(dǎo)向轉(zhuǎn)向架比較復(fù)雜,并且對徑向機構(gòu)制造精度的要求也較高。
為了進一步改進轉(zhuǎn)向架通過小半徑曲線的性能,進而研制出了主動徑向轉(zhuǎn)向架。主動徑向轉(zhuǎn)向架通過曲線時利用安裝在轉(zhuǎn)向架側(cè)梁上的作動器推動徑向機構(gòu)運動,使輪對達到曲線徑向的目的,使轉(zhuǎn)向架具有良好的曲線通過性能;在直線上運行時,作動器不動作,而且給輪對提供一定的縱向定位剛度,提高其運行的穩(wěn)定性。
1 主動徑向轉(zhuǎn)向架控制系統(tǒng)模型與原理
主動徑向轉(zhuǎn)向架的控制系統(tǒng)比較復(fù)雜,它是主動徑向轉(zhuǎn)向架的核心部分。控制系統(tǒng)的組成包括信號采集裝置、伺服電機、作動器以及控制器等。轉(zhuǎn)向架構(gòu)架兩側(cè)裝有作動器,一端與構(gòu)架相連,另一端與徑向機構(gòu)相連,通過采集的信號控制作動器動作,使輪對處于曲線的徑向位置。其控制系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
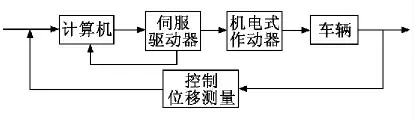
圖1 主動徑向轉(zhuǎn)向架控制系統(tǒng)結(jié)構(gòu)框圖
圖1中,計算機主要負責(zé)信號采集并將其轉(zhuǎn)換為控制系統(tǒng)的控制指令,以及監(jiān)控機電式作動器與伺服驅(qū)動器的工作狀況;控制位移測量是作動器實施動作后測量受控對象的相對角位移,并與理論值相比較,達到最優(yōu)控制。本主動徑向轉(zhuǎn)向架的控制部分采用的是機電式作動器和電機伺服驅(qū)動器。伺服電機在控制指令作用下帶動驅(qū)動器正反轉(zhuǎn)動,由行星齒輪箱與滾珠絲桿螺旋副將電機的旋轉(zhuǎn)運動轉(zhuǎn)變?yōu)榻z桿螺母副的直線運動,從而控制作動器的伸縮運動,使輪對到達徑向位置。根據(jù)文獻[2],將伺服驅(qū)動器看作為比例環(huán)節(jié)K2;機電式作動器中的伺服電機可設(shè)定為一個傳遞函數(shù)G(s)=(1/KE)/(Tms+1)(其中,KE為感應(yīng)電壓常數(shù),KE=0.346V·s/rad,Tm為電機時 間常數(shù),Tm=0.003 3s);機械傳動部分看作是積分環(huán)節(jié)L/(2isπ)(其中,L 為絲杠導(dǎo)程,L=10mm,i為總傳動比,i=10);位移傳感器作為反饋環(huán)節(jié),即位移與角度的關(guān)系式,反饋系數(shù)Kf=0.82。建立的控制系統(tǒng)方框圖如圖2所示。
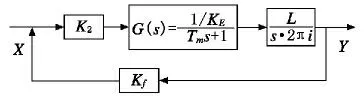
圖2 控制系統(tǒng)方框圖
控制系統(tǒng)中,反饋環(huán)節(jié)的位移與角度關(guān)系式即為作動器的位移與輪對徑向轉(zhuǎn)角關(guān)系式,如圖3 所示。其中,b為轉(zhuǎn)向架軸距的一半;Ls為車輛定距的一半;R 為曲線半徑;ψwo為輪對徑向轉(zhuǎn)角。
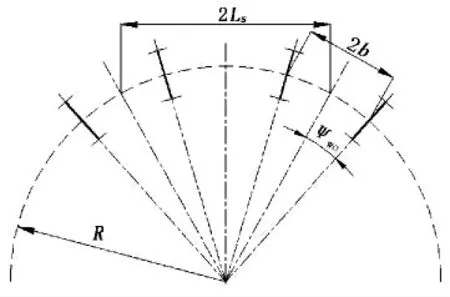
圖3 曲線上轉(zhuǎn)向架徑向位置關(guān)系
由圖3有:

作動器的行程x 為:

其中:af為轉(zhuǎn)向架的作動器橫向跨距,af=2.45m。
2 控制方法的比較分析
由于主動徑向轉(zhuǎn)向架控制系統(tǒng)具有復(fù)雜性、時變性以及非線性等特點,因此選取一個恰當(dāng)?shù)目刂品椒ㄓ绕渲匾?/p>
2.1 經(jīng)典PID 控制
經(jīng)典PID 控制包括比例、積分和微分控制3個部分。由控制理論可知,比例系數(shù)Kp決定著控制系統(tǒng)控制作用的強弱,增大比例系數(shù)可以有效地減少穩(wěn)態(tài)誤差,但是較大的比例系數(shù)反而會引起控制系統(tǒng)的振蕩甚至導(dǎo)致閉環(huán)控制系統(tǒng)的不穩(wěn)定;積分時間常數(shù)Ki可以消除穩(wěn)態(tài)誤差,但它會使系統(tǒng)的動態(tài)響應(yīng)較慢,同時較大的積分系數(shù)會使系統(tǒng)的穩(wěn)定性變壞;微分時間常數(shù)Kd可以提高控制系統(tǒng)的動態(tài)響應(yīng),克服振蕩,減小調(diào)整時間,從而使系統(tǒng)趨于穩(wěn)定。這3個系數(shù)互相制約互相聯(lián)系,需要反復(fù)調(diào)整才能達到理想的效果。根據(jù)文獻[2],本文采用P 控制,PID 控制參數(shù)為:Kp=2 600,Ki=Kd=0。運用MATLAB 中的Simulink模塊進行建模仿真分析,其控制仿真原理圖如圖4所示,仿真結(jié)果如圖5和圖6所示。
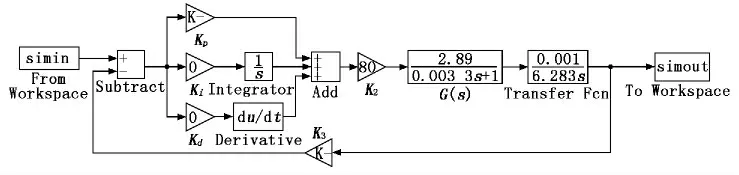
圖4 PID 控制仿真原理圖
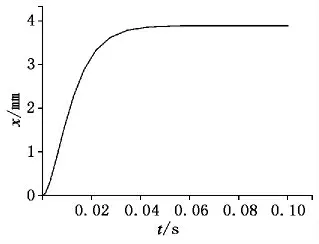
圖5 PID 控制仿真的階躍響應(yīng)曲線
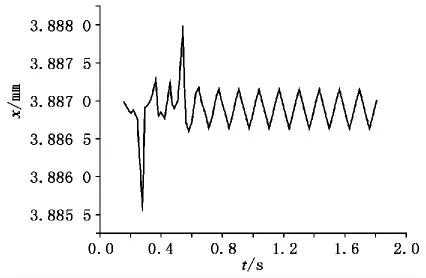
圖6 PID 控制仿真的穩(wěn)態(tài)曲線
由圖5和圖6可知,采用PID 控制方法,系統(tǒng)的階躍響應(yīng)快,但是控制系統(tǒng)輸出穩(wěn)定性較差。
2.2 模糊控制
采用模糊控制在MATLAB 的Simulink 模塊中實現(xiàn)模糊控制的仿真,其控制仿真原理圖如圖7所示,仿真結(jié)果如圖8和圖9所示。
由圖8和圖9可知,采用模糊控制方法,控制系統(tǒng)輸出穩(wěn)定較好,但階躍響應(yīng)時間相應(yīng)較慢。
2.3 混合型模糊-PID 控制
混合型模糊-PID 控制采用常規(guī)PID 控制器和模糊控制相結(jié)合的系統(tǒng)結(jié)構(gòu)。本文采用的是P 控制和模糊控制相結(jié)合,P 控制的輸出與二維模糊控制的輸出相疊加作為混合型模糊-PID 控制的總輸出。其中模糊集合、語言變量以及控制規(guī)則依然采用模糊控制形式,只是對P控制的比例系數(shù)Kp和K2進行了調(diào)整。經(jīng)過反復(fù)調(diào)整最終確定比例系數(shù)Kp=900,K2=2。運用MATLAB的Simulink模塊建立的混合型模糊-PID 仿真原理圖如圖10 所示,其仿真結(jié)果如圖11和圖12 所示。
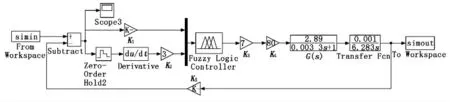
圖7 模糊控制仿真原理圖
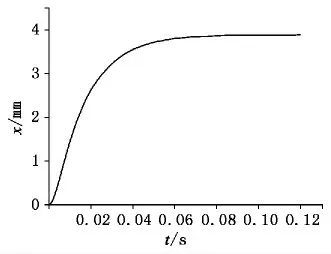
圖8 模糊控制仿真的階躍響應(yīng)曲線
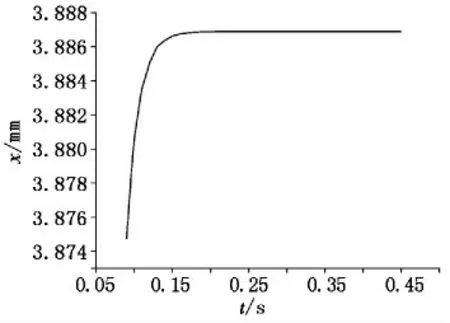
圖9 模糊控制仿真的穩(wěn)態(tài)曲線
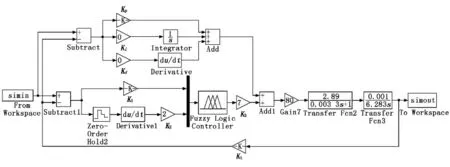
圖10 混合型模糊-PID 仿真原理圖
由圖11和圖12可知,采用混合型模糊-PID 控制方法不僅系統(tǒng)的階躍響應(yīng)時間較快,而且系統(tǒng)的穩(wěn)定性也較好。
3 結(jié)論
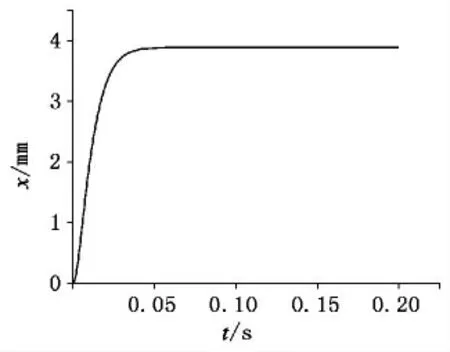
圖11 混合型模糊-PID 控制仿真的階躍響應(yīng)曲線
通過在MATLAB的Simulink模塊中,對主動徑向轉(zhuǎn)向架的控制系統(tǒng)進行仿真。仿真結(jié)果顯示采用混合型模糊-PID 控制方法不僅系統(tǒng)的階躍響應(yīng)時間較快,而且控制系統(tǒng)輸出的穩(wěn)定性也較好。因此主動徑向轉(zhuǎn)向架控制系統(tǒng)宜采用混合型模糊-PID 控制方法。
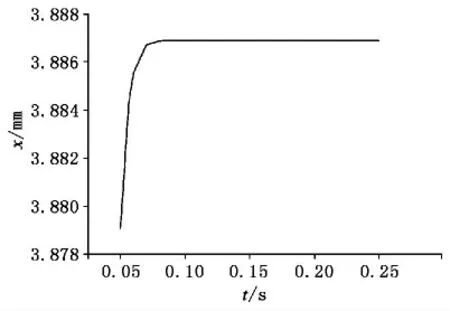
圖12 混合型模糊-PID 控制仿真的穩(wěn)態(tài)曲線
[1] 嚴雋耄,傅茂海.車輛工程[M].北京:中國鐵道出版社,2007.
[2] 卜繼玲.主動懸掛擺式列車組運行性能的研究[D].成都:西南交通大學(xué),2001:98-99.
[3] 席愛民.模糊控制技術(shù)[M].西安:西安電子科技大學(xué)出版社,2008.
[4] 梁煒昭,劉后廣,趙秀云.基于模糊自適應(yīng)PID 的擺式列車傾擺控制系統(tǒng)研究[J].機電工程技術(shù),2009,38(3):13-15.
[5] 楊志強,張濟民.基于PID 算法的擺式客車傾擺控制研究[J].機械設(shè)計與制造,2005(11):49-50.
猜你喜歡
湖南大學(xué)學(xué)報·自然科學(xué)版(2025年6期)2025-07-16 00:00:00
裝備制造技術(shù)(2021年5期)2021-08-14 01:44:56
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術(shù)與機床(2019年12期)2020-01-06 03:17:46
經(jīng)濟技術(shù)協(xié)作信息(2018年18期)2019-01-23 07:17:20
西南交通大學(xué)學(xué)報(2018年5期)2018-11-08 10:58:26
現(xiàn)代城市軌道交通(2018年5期)2018-05-28 02:19:35
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年1期)2016-05-17 05:33:38
鐵道運營技術(shù)(2015年3期)2015-12-23 09:27:14
