慣性導航系統自適應輔助GNSS矢量跟蹤方法
2014-01-13 01:53:32李傳軍彭鐘鋒李興城
探測與控制學報 2014年5期
李傳軍,彭鐘鋒,李興城
(北京理工大學宇航學院飛行器動力學與控制教育部重點實驗室,北京100081)
0 引言
全球衛星導航系統(GNSS)全天候提供位置、速度和時間信息,在低成本制導武器上有著廣泛應用,但衛星信號功率較低,容易受到無意和有意干擾。通過采用慣性導航系統(INS)輔助GNSS提高跟蹤靈敏度,從而提高接收機抗干擾能力,是一種提高INS/GNSS組合導航能力的有效途徑。
INS輔助矢量跟蹤技術是INS/GNSS 超緊耦合系統的基礎。自從1980年Copps E.M.提出了矢量跟蹤的概念并認識到其優越性后,許多研究者和機構開始了矢量跟蹤以及INS/GNSSS超緊耦合技術 的 研 究,其 中 以Raytheon 公 司[1]、Aerospace公司[2]等為代表提出了自己的基于INS輔助矢量跟蹤技術的超緊耦合方法。D.H.Hwang給出了統一結構的超緊耦合系統[3]。國內也廣泛開展了矢量跟蹤技術及組合導航技術研究,王新龍[4]對超緊耦合系統進行了仿真試驗,唐康華等[5]對超緊耦合中的預處理濾波器進行了研究。考慮到低成本制導武器的導航系統特點,為了提高復雜電磁環境下的高動態衛星導航接收機的抗干擾能力,提出了低成本INS自適應輔助GNSS矢量跟蹤算法,并給出了預處理濾波器、組合導航濾波器和高動態標量跟蹤環路的具體設計方法。
1 INS自適應輔助矢量跟蹤結構
考慮到低成本制導武器的INS/GNSS 導航系統一般基于低成本慣性導航系統,導航精度嚴重依賴衛星導航,在干擾環境下即使載波相位跟蹤失鎖,只要保證載波跟蹤環路的頻率鎖定和碼環路的相位鎖定,其導航精度也高于低成本純慣性導航系統,故提出了基于矢量延遲鎖定環和鎖頻環并級聯高動態鎖相環(VDFLL+CaPLL)的INS 自適應輔助GNSS矢量跟蹤方法,其原理框圖見圖1。
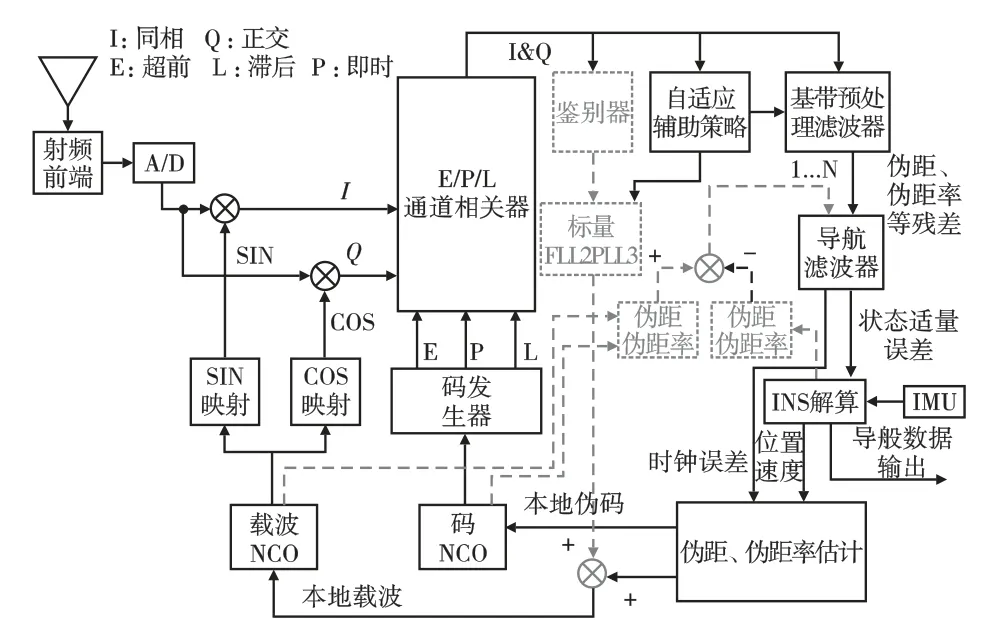
圖1 INS自適應輔助GNSS矢量跟蹤方法的原理框圖Fig.1 INS-aided GNSS adaptive vector tracking
該方法根據自適應輔助策略,切換基于二階鎖頻環輔助的高動態三階鎖相環的標量跟蹤環路和基于基帶預處理濾波器和組合導航濾波器的INS輔助矢量跟蹤環路。在矢量跟蹤情況下,該方法采用了聯邦濾波結構,先對各通道信號進行基帶預處理濾波,然后輸入給組合導航濾波器,通過校正后的INS解算結果對環路NCO 進行控制,實現跟蹤環路閉合。在標量跟蹤情況下,采用了跟蹤環路的偽距和INS估計的偽距求差作為偽距殘差以及相同方法計算的偽距率殘差,同矢量跟蹤通道預處理濾波器輸出的偽距殘差和偽距率殘差一起作為觀測量輸入到導航濾波器,解決了標量跟蹤環路和矢量跟蹤環路的導航解算的統一。
2 INS 自適應輔助矢量跟蹤設計與實現
2.1 基帶預處理濾波器的分析與設計
基帶信號預處理濾波器技術可采用直接非相干累加法、多項式擬合法、基于鑒別器的Kalman濾波法和基于非線性測量的EKF 濾波法等[6]。考慮到目前處理器的發展水平,鑒于聯邦濾波型超緊耦合結構的運算量更適合目前FPGA+DSP 架構的接收機硬件系統,本文采用了基于鑒別器的Kalman濾波法的一種改進的預處理方法,該方法通過對I和Q 數據進行轉化處理,便于建立噪聲模型,可估計測量噪聲,有利于Kalman濾波器的最優估計。
采用偽距、偽距率和偽距加速度的殘差作為狀態變量,則預處理卡爾曼濾波器的狀態方程為:
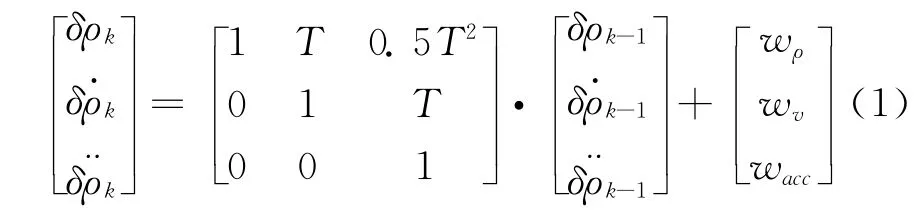
式(1)中,wρ為偽距殘差隨機游走,wv為偽距率殘差隨機游走,wacc為偽距加速度殘差隨機游走。
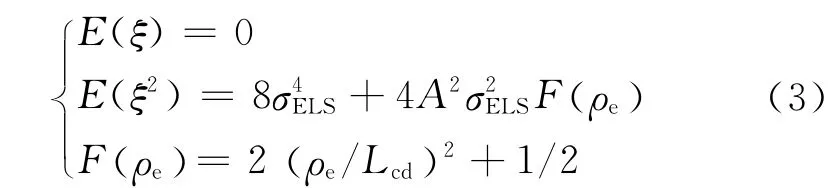
采用基于非線性測量的EKF 濾波法,保留了I和Q 支路數據的加性高斯白噪聲的噪聲特性,更適合Kalman濾波器的要求,但運算量較大,且估計的相位誤差存在載波周模糊度,當存在干擾造成跟蹤誤差較大時,存在的周模糊度誤差更大。本文采用的低運算復雜度I和Q 數值非線性變換處理,可實現無偏偽距殘差估計,計算公式如下[7]:

其中,Ak為I和Q 的信號幅度,ρe,k 為檢測的偽距誤差,Lcd為1個碼片對應的距離,ξ為測量噪聲,其均值和協方差為[7]
信號幅度Ak模型為

偽距率殘差估計采用叉積頻率鑒別器方法為[7]:

其中,Tcoh為相干積分時間,λc為載波的波長,γ為測量噪聲。
由式(2)和(5)可知,預處理濾波器的量測方程為:

2.2 超緊耦合組合導航濾波器設計
超緊耦合的導航濾波器可借鑒緊組合的導航濾波器,其推導過程與緊組合導航濾波器的推導過程類似[6]。GNSS的誤差狀態主要是與接收機本地時鐘誤差有關,在緊組合建立的GNSS的誤差模型基礎上擴展時鐘加速度漂移,則GNSS誤差模型為:
其中,wtcu為時鐘誤差等效距離誤差的驅動噪聲,wtcru為時鐘漂移等效速度誤差的驅動噪聲,wtcau為時鐘漂移等效加速度誤差的驅動噪聲。
超緊耦合系統的導航濾波器的狀態方程是由INS系統誤差模型和GNSS系統誤差模型組成的,組合濾波器狀態方程為
其中,Cnb為載體坐標系到導航坐標系轉換的方向余弦,I3表示3 3單位矩陣,F 參數參考文獻[6]。
當衛星處于矢量跟蹤狀態時,超緊耦合系統的量測方程的測量值是預處理濾波器輸出的偽距殘差、偽距率殘差和偽距加速度殘差;當衛星處于標量跟蹤狀態時,采用標量跟蹤環路的偽距和INS估計的偽距求差作為偽距殘差以及相同方法計算的偽距率殘差,與矢量跟蹤狀態的觀測量統一。M 個衛星參與導航濾波處理的測量方程為:
其中,vρi,vvi,vai(i=1,2,…,m)分別為GNSS接收機偽距、偽距率以及偽距加速度測量噪聲。He1、M3×3等參數參考文獻[6]。
2.3 高動態標量跟蹤環路設計
高動態標量跟蹤環路采用二階FLL 輔助三階PLL實現衛星信號的初步環路跟蹤,在不同干擾環境和動態條件下,根據載體的動態特性和跟蹤狀態自適應調節環路的結構和階數,在純鎖相環下實現最優帶寬高精度標量跟蹤。
基本的二階鎖頻環輔助三階鎖相環的環路濾波器部分如圖2所示,環路濾波器輸出為:

式(10)中,Wk表示當前時刻濾波器輸出,Wk-1表示上一時刻濾波器輸出,Wk-2表示上一時刻的前一時刻的濾波器輸出,T 表示鎖相環預積分時間,FD 表示鎖頻環鑒頻器輸出,C 表示圖2中的環路濾波系數,即為

圖2 二階FLL輔助三階PLL的濾波器方框圖Fig.2 The filter with second-order FLL-aided third-order PLL
當環路處于純PLL的狀態時,采用最優帶寬跟蹤。對于三階PLL,1σ經驗跟蹤閾值為[8]:

當載波環路處于鎖定狀況下,可以實時估計C/N0和動態應力d3R/dt3。優化環路帶寬的目的是選擇合適的Bn,使總的PLL跟蹤環測量誤差σPLL達到最小,由以下公式可計算最優帶寬[8]。

則三階鎖相環的最優帶寬為
2.4 INS自適應輔助跟蹤環路的實現
基于INS輔助矢量跟蹤的超緊耦合系統,采用了自適應輔助跟蹤算法和可配置跟蹤環路結構,如圖1所示。該算法根據環路鎖定情況,采用一定的切換策略,自適應切換高動態標量跟蹤環路和INS輔助矢量跟蹤環路。當處于高動態標量跟蹤環路的情況下,根據載體的動態特性和跟蹤狀態自適應調節環路的結構和階數,實現低干擾環境下的純鎖相環跟蹤的高精度導航和中等干擾環境下INS輔助矢量跟蹤,從而在滿足一定導航精度情況下實現最大的導航能力。
INS自適應輔助跟蹤環路的策略如下:
步驟1:采用二階FLL輔助三階PLL實現衛星信號的初步的跟蹤環路鎖定。
步驟2:根據INS估計的視距加速度和加加速度以及跟蹤狀態自適應調節環路的結構和階數。
步驟3:根據估計的視距動態應力參數和信號的C/N0計算最優帶寬,自適應調節環路帶寬。
步驟4:根據信號的C/N0(目前閾值設定為32 dB-Hz)和載體的動態特性(目前加速度閾值設定為10 g)判斷是否需要進行INS輔助矢量跟蹤環路,信號質量較高且動態性能較低時返回到步驟2,否則進入步驟5。
步驟5:根據觀測量性能指示器、信號的C/N0及組合導航濾波器的工作狀態等參數確定是否采用INS輔助矢量跟蹤,如果INS輔助矢量跟蹤性能良好則進入步驟6,否則環路失鎖,進行重捕獲。
步驟6:根據估計的衛星偽距和偽距率,控制本地碼環NCO 和載波環NCO。
步驟7:返回步驟4。
組合導航濾波器估計出狀態誤差后實時校正INS系統。基于INS 解算模塊輸出的載體位置和速度,以及衛星星歷計算出的衛星位置和速度,可估計衛星的偽距和偽距率,用于控制環路NCO,從而實現INS輔助矢量跟蹤。
3 高動態仿真試驗驗證
3.1 飛行軌跡及參數設置
本 文 采 用Spirent Communications 公 司 的GSS7700GPS/SBAS 衛星信號模擬器,設計了理想的6DOF彈道模型的飛行軌跡,用來驗證基于INS輔助GNSS矢量跟蹤算法。飛行軌跡采用類似于火箭彈6DOF彈道模型,為了簡化試驗設計并未準確考慮實際飛行中的空氣動力學問題。圖3給出了飛行過程中的高程和東北天加速度曲線。

圖3 理想的飛行軌跡Fig.3 Theory flight path
目前對衛星導航的惡意干擾分為欺騙性干擾和壓制性干擾。壓制性干擾又包括窄帶干擾和寬度干擾。本文提高抗干擾能力主要是提高抗壓制性干擾的能力。不管窄帶干擾和寬度干擾,其干擾的本質是增加信號的干信比,達到接收機無法跟蹤甚至射頻前端飽和的目的,而導致接收機不能導航定位。為了方便模擬中等寬帶干擾環境,采用噪聲功率不變、降低信號強度的方法,從而達到增加干信比,飛行過程中衛星信號強度逐漸衰減。模擬器仿真GPS L1C/A 衛星信號,圖4給出了當時GPS衛星分布和衛星SV13的信號載噪比。利用6DOF彈道模型獲得理論IMU 數據,數據采樣率為100Hz,通過建立加速度計和陀螺誤差模型,產生不同精度等級IMU 數據。本文選擇參考文獻[9]給出的低成本慣導的DIGNU-1 誤差模型,其中陀螺漂移為75(°)/h,加速度計零偏為9mg。
3.2 傳統獨立式高動態跟蹤試驗
獨立式高動態接收機基于三階鎖相環的高動態環路跟蹤技術,設定鎖頻環相干積分時間為10 ms和鎖相環的相干積分時間為20 ms,在衛星信號有效跟蹤的情況下,保持載波環的相位鎖定,確保高精度的偽距測量。圖5給出了衛星SV13、SV20、SV21和SV22的環路跟蹤的C/N0,由圖分析,獨立式高動態三階鎖相環的衛星失鎖門限約為27dB-Hz。

圖4 衛星分布情況和衛星13的載噪比Fig.4 Thesky plot of satellites and the carrier-to-noise of SV13

圖5 PLL跟蹤的衛星C/N0Fig.5 The C/N0of PLL-tracking satellites
3.3 INS輔助矢量跟蹤試驗
基于INS輔助矢量跟蹤的超緊耦合系統(以下簡稱UTC)以矢量跟蹤為基礎,通過INS的導航結果控制載波環路和碼環路的NCO,實現衛星信號的跟蹤。圖6給出了衛星SV13、SV20、SV21和SV22的環路跟蹤的C/N0。
圖7給出了122~126s期間SV13的環路跟蹤相關參數,包括基帶測量的載噪比C/N0、頻率鑒別器的輸出FLLDisc、預處理濾波器輸出的偽距率殘差PRDotErr、鑒頻器輸出的頻率誤差數據的統計值Data Statistics,其中std表示1σ的頻率誤差。在此期間,信號的C/N0在1 5dB-Hz附近,1σ的頻率誤差為52.9Hz。
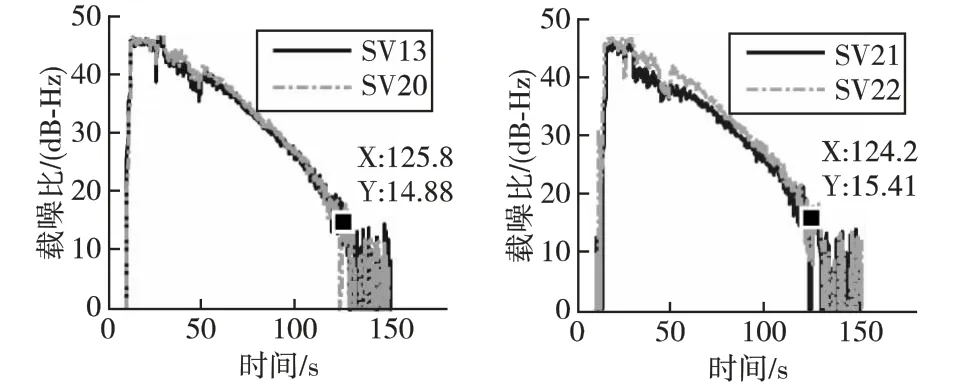
圖6 UTC跟蹤的衛星C/N0Fig.6 The C/N0of UTC-tracking satellites

圖7 UTC環路跟蹤狀態相關參數(122~126s)Fig.7 UTC loop tracking status
圖8給出了基于INS 輔助矢量跟蹤的組合導航系統的導航速度和位置誤差。由圖8可知,飛行約124s后導航誤差明顯上升,結合全程測量的C/N0說明此時衛星逐漸失鎖,綜合考慮圖7的分析結果,表明INS輔助GNSS矢量跟蹤的衛星失鎖門限在15dB-Hz附近。從圖7可知,此時FLL 的頻率誤差已遠超過傳統失鎖門限16.7 Hz,這表明傳統的失鎖門限不適合超緊耦合的衛星跟蹤性能評價,如何有效評價INS輔助矢量跟蹤的衛星跟蹤性能有待于進一步研究。

圖8 基于UTC的組合導航的速度和位置誤差Fig.8 The speed and position error of UTC-based navigation
4 結論
本文提出了低成本INS自適應輔助GNSS 矢量跟蹤方法,該方法根據觀測量性能指示器、跟蹤環路鎖定情況和衛星信號信噪比等,自適應切換高動態標量跟蹤環路和INS輔助矢量跟蹤環路,實現低干擾環境下的高精度導航和中等干擾環境下滿足導航精度情況下的最大導航能力。文中建立了INS/GNSS超緊耦合濾波模型,給出了INS輔助矢量跟蹤環路的具體實現方法。動態仿真試驗結果表明,在高動態干擾環境下傳統獨立式高動態接收機可跟蹤載噪比為27dB-Hz的GPS L1C/A 衛星信號,而基于INS輔助矢量跟蹤的超緊耦合系統導航性能有明顯的提高,可跟蹤最小載噪比為15dB-Hz,其抗干擾能力提高了約12dB。
[1]Horslund J M,Hooker J R.Increase jamming immunity by optimizing processing gain for GPS/INS systems[P].US:No.5983160,1999.
[2]Abbott A S,Lillo W E.Global positioning systems and inertial measuring unit ultratight coupling method[P].US:No.6516021,2003.
[3]Hwang D H,Lim D W,Cho S L,et al.Unified approach to ultra-tightly-coupled GPS/INS integrated navigation system[J].Aerospace and Electronic Systems Magazine,2011,26(3):30-38.
[4]王新龍,于潔.基于矢量跟蹤的SINS/GPS深組合導航方法[J].中國慣性技術學報,2009,17(6):710-717.
[5]郭瑤,吳文啟,唐康華,等.北斗/INS 深耦合接收機基帶濾波器設計[J].中國慣性技術學報,2013,21(1):71-75.
[6]李傳軍.INS輔助高動態衛星導航接收機關鍵技術研究[D].北京:北京理工大學,2013.
[7]Steven B.Alexander.System and Method for GPS Acquisiton Using Advanced Tight Coupling [P]:US:7,415,354B2,2008.
[8]Li C J,Yang S X.Optimization of the carrier tracking loop for GPS high dynamic receivers[J].Journal of Beijing Institute of Technology,2012,21(2):164-171.
[9]Ohlmeyer E J.Analysis of an ultra-tightly coupled GPS/INS system in jamming[C]//IEEE/ION,Position,Location,and Navigation Symposium.San Diego,California:IEEE,2006:44-53.