采用無線信號測距加權的室內協(xié)同定位
2014-01-16 06:27:02JamesPINCHINChrisHILLTerryMOORE
導航定位學報 2014年2期
荊 昊,James PINCHIN,Chris HILL,Terry MOORE
(英國諾丁漢大學 地理空間研究所,諾丁漢NG7 2TU)
1 引言
近年來,隨著全球衛(wèi)星導航定位系統(tǒng)(global navigation satellite system,GNSS)不斷普及,面對軍用和民用的基于位置服務(location based services,LBS)也越來越廣泛。然而大部分LBS用戶的日常活動其實集中在室內或市區(qū)環(huán)境中,這些區(qū)域由于衛(wèi)星信號被遮擋以及多路徑效應嚴重,無法通過傳統(tǒng)的基于衛(wèi)星的導航定位方法進行精確定位[1-2],定位誤差甚至可高達200 m[3]。這樣的定位精度,無論是針對普通的社交網絡用戶、商業(yè)應用,或急救、消防人員,都無法滿足用戶需求。
針對無法獲取有效衛(wèi)星信號的室內環(huán)境,目前最常見的定位方法有兩種,即基于無線網絡信號(WiFi,藍牙,超寬帶無線信號等)的定位和基于低端慣性導航(inertial navigation system,INS)的定位[4-6]。基于INS的導航定位不需任何輔助基礎設施,可以提供室內室外無縫定位,但是INS(尤其低端INS)的陀螺航向漂移量非常大,數秒內可造成上百米的位置誤差[4-5]。實際應用中必須加入適當改正量才能提供正確定位方案。無線信號多存在于室內環(huán)境中,因此是較好彌補室內GNSS定位不足的方法。然而傳統(tǒng)無線信號極其不穩(wěn)定,信號波動大,容易受到周圍環(huán)境變化的干擾,定位時會產生較大的誤差[6-8]。超寬帶無線信號(ultra-wideband,UWB)將信號分布于1.25 GHz的帶寬上,因此傳輸信號的時間分辨率極高,相比窄頻帶信號具有穩(wěn)定、信號穿透性強等性質,基于UWB的定位系統(tǒng)能夠提供厘米級精度的定位結果與測距信息[9-12]。然而UWB定位也存在信號捕獲問題,依舊會受到多路徑效應與非視線傳輸(non line of sight,NLOS)信號干擾,導致定位與測距精度下降[13]。但只要能夠分辨與剔除NLOS造成的干擾可提高定位精度[14-17]。
集成多傳感器的協(xié)同定位能夠改正單傳感器信號造成的誤差并提高定位系統(tǒng)穩(wěn)定性,由此提供可靠的室內外無縫導航定位[13,18]。部分學者提出多用戶共享信息、多傳感器改正信息等協(xié)同定位方法來提高復雜環(huán)境中的定位精度[19-21]。然而這些系統(tǒng)在一定程度上仍然需要GNSS提供定位改正信息。
本文提出的基于多用戶多傳感器的室內協(xié)同定位方法集成了多用戶的測距信號以及周邊可接收的WiFi信號、樓層室內地圖與從低端INS傳感器獲取的航向推算(dead reckoning,DR)信息。獲取的信息采用粒子濾波(particle filtering,PF)集成來改正、更新用戶導航定位結果。
本文首先討論實驗獲取的UWB信號測距結果,提出基于UWB測距提高系統(tǒng)穩(wěn)定性的方法;其次應用基于高斯過程回歸(Gaussian process regression,GPR)機器學習的快速生成WiFi信號強度數據庫方法,并提出基于PF集成DR、WiFi、室內地圖與測距信息的室內協(xié)同定位算法;最后,將室內采集的數據通過算法集成得到定位結果并進行算法結果分析。
2 UWB無線信號測距
在復雜環(huán)境的定位應用中,獲取到的無線信號分為LOS和NLOS兩種。當信號發(fā)射站(access point,AP)與接收機之間無遮擋物,獲取的信號即為LOS信號;需要穿過遮擋物或者從其他物體反射才可達到接收機的信號,均為NLOS信號。接收到的NLOS信號傳播時間比無遮擋的LOS信號傳播時間長,并且一般來說信號強度減弱,信號更不穩(wěn)定,造成定位精度下降。因此能夠識別出獲取的NLOS信號,并剔除它們對定位的影響變得非常重要。文獻[22]提出基于機器學習方向對信號分類識別出NLOS信號。通過無線信號獲取的測距信息可表達為
(1)
式中,d是用戶間真實距離,bi為NLOS造成的誤差,與遇到的遮擋物材質、厚度、總體傳播路徑距離以及整體網絡穩(wěn)定性有密切關系,ei為正態(tài)分布的系統(tǒng)誤差。
為了驗證UWB測距信號的實際效果,作者在諾丁漢大學地理空間信息大樓中進行了三組UWB測距實驗。一個完整的UWB網絡需要至少4個基站(base unit,BU)才能提供移動設備(mobile unit,MU)的3維坐標,BU應當放置在所需提供定位的區(qū)域的周邊,盡量分散于不同高度并包圍目標區(qū)域,同時使BU與MU之間盡量保持通視。實驗樓體設計及使用材質較新,室內結構如圖1所示,沿著樓道兩旁的小房間為普通辦公室,下方兩個大房間分別為會議室和教室,中間的大房間為儀器設備室,里面使用金屬架放置全站儀、GNSS等儀器設備,上方的大房間是儀器室兼車庫,里面放置三腳架等設備,并存放實驗車輛,由此可見樓中有大量金屬遮擋物。圓圈中的五星處設為區(qū)域坐標系的零點,直線為行走路徑。
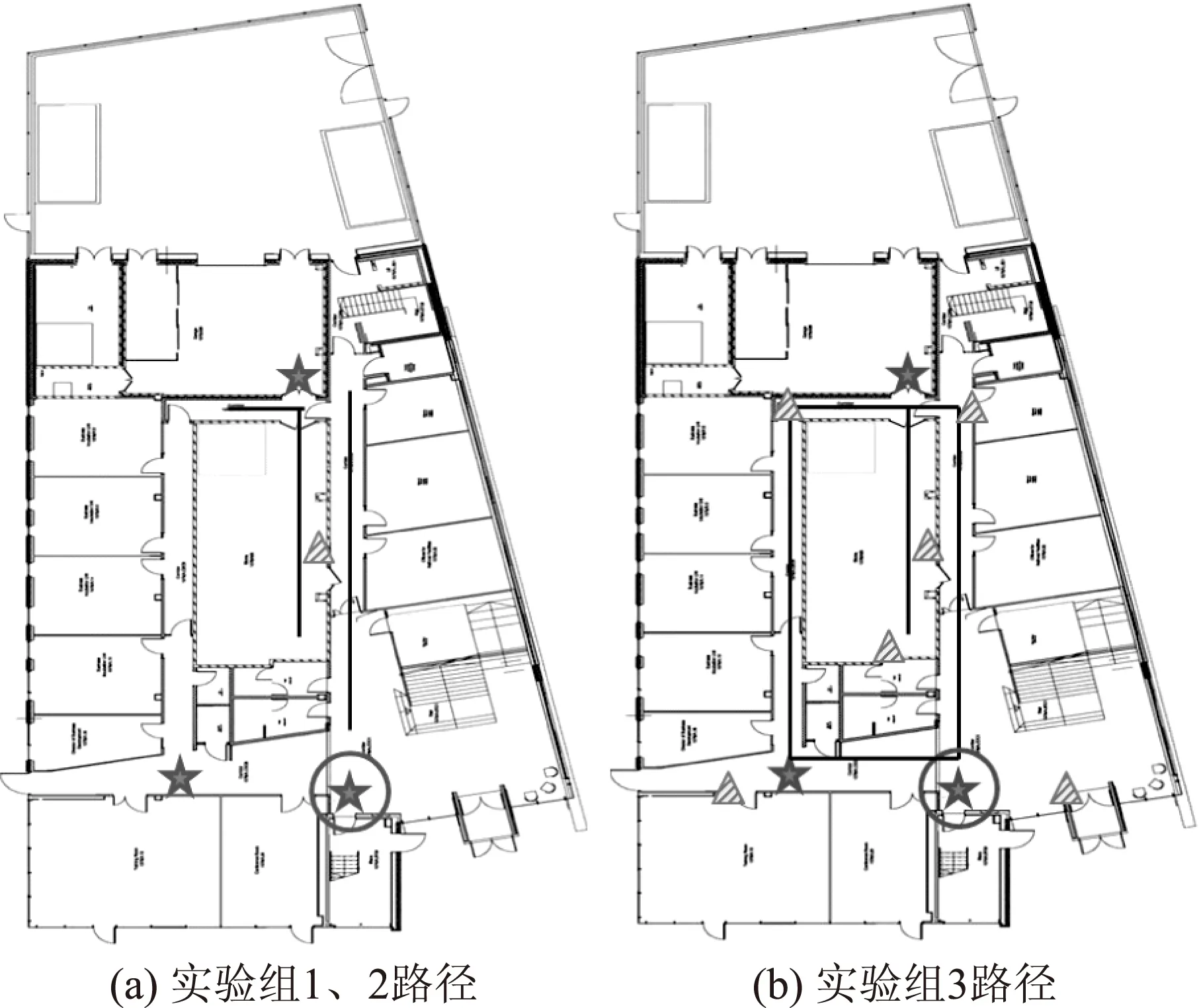
圖1 實驗區(qū)域室內地圖
該實驗通過不同網絡設置來比較系統(tǒng)處理NLOS信號的穩(wěn)定性及測距精度。第一組實驗僅使用一個移動的BU和一個移動MU獲取測距數據(只有BU能提供設備間信號同步并與MU傳輸數據,因此必須使用至少1個BU),即不完整網絡的測距;第二組實驗將BU放置并固定在已知點,2個MU之間進行測距,即建立簡單的無法提供坐標定位的網絡;第三組實驗建立完整的網絡,MU可獲取坐標定位結果,同時記錄測距結果。實驗中各BU架設位置與移動用戶位置均由徠卡全自動全站儀測量,已知點精度達2 mm,移動用戶跟蹤精度為10 cm(主要誤差來源于移動過程中UWB設備移動而非全站儀測量誤差)。
2.1 非網絡中用戶測距
2.1.1 實驗組1
該組實驗中,用戶1(R1)攜帶BU,用戶2(R2)攜帶MU并接入電腦記錄數據。實驗中R1沿樓道走動,R2的路徑與R1平行在儀器設備室中走動,因此大部分時間有墻體遮擋,僅在最后R2走出設備室進入樓道時與R1處于通視狀態(tài)。作為用戶位置——時間參考,圖2(a)給出兩用戶的南北向坐標,由于所選擇的行走路徑(見圖1(a)),所以東西向坐標基本始終保持不變。
2.1.2 實驗組2
該組實驗中,兩用戶行走路徑方向與實驗組1相同,只對R2路徑稍作延長,由此加入了人體和墻體同時遮擋的情況,圖2(b)給出兩用戶位置——時間參考。該實驗將BU固定在設備室內,R1、R2同時攜帶MU。

圖2 實驗組南北向坐標
測距結果見表1及表2。
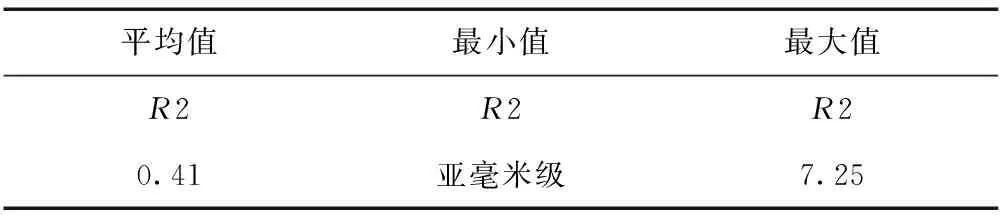
表1 實驗組1測距誤差/m
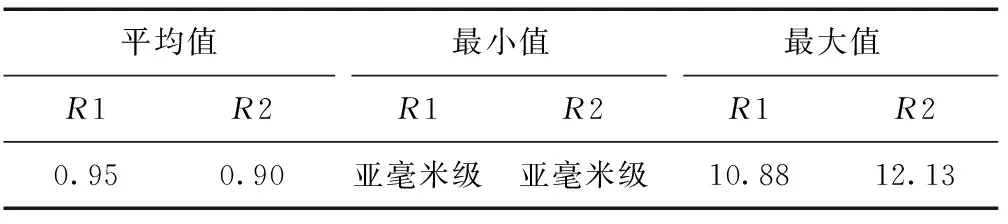
表2 實驗組2測距誤差/m
圖3及圖4為兩組實驗測距結果示意圖,實線表示全站儀跟蹤測量的兩用戶間距離,點狀線表示UWB測距結果,虛線表示測距誤差。由結果可見,在遮擋情況下,測距結果比實際距離稍長。兩個設備在有嚴重遮擋時,會導致不能同步,設備間的測距結果相差較大。其中身體遮擋對測距影響較大,誤差增加幅度大。而只要兩用戶能夠保持網絡傳輸同步,進入通視區(qū)域后,測距精度能夠快速提高達到厘米級精度。用戶保持網絡同步時,兩用戶的測距信息相差很小,可視為相同。實驗組1中85%的測距誤差在1 m以內。實驗組2中71%的數據測距誤差在1 m以內,比第一組實驗略有下降。
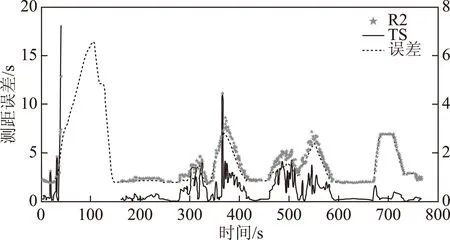
圖3 實驗組1測距誤差
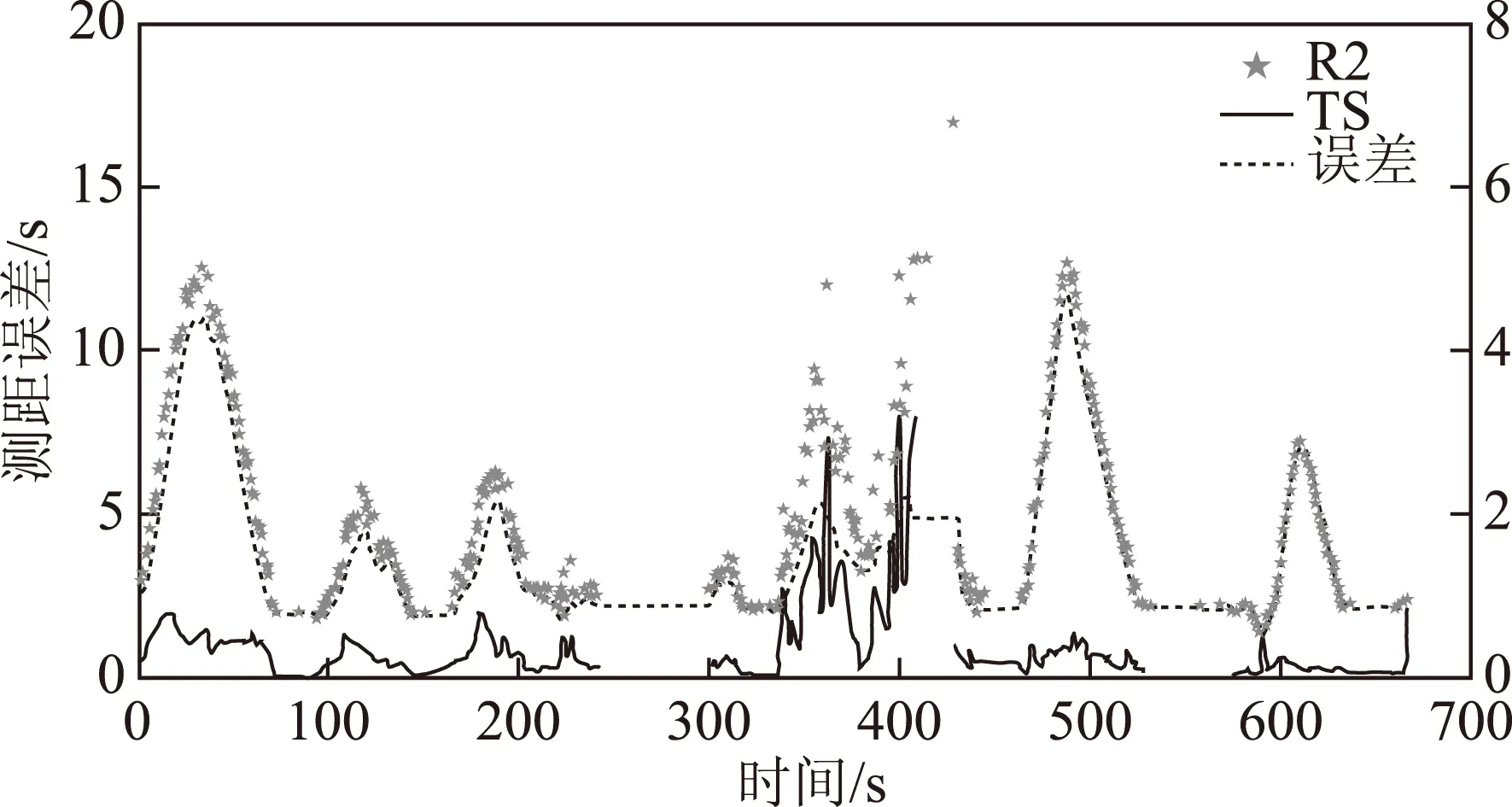
圖4 實驗組2測距誤差
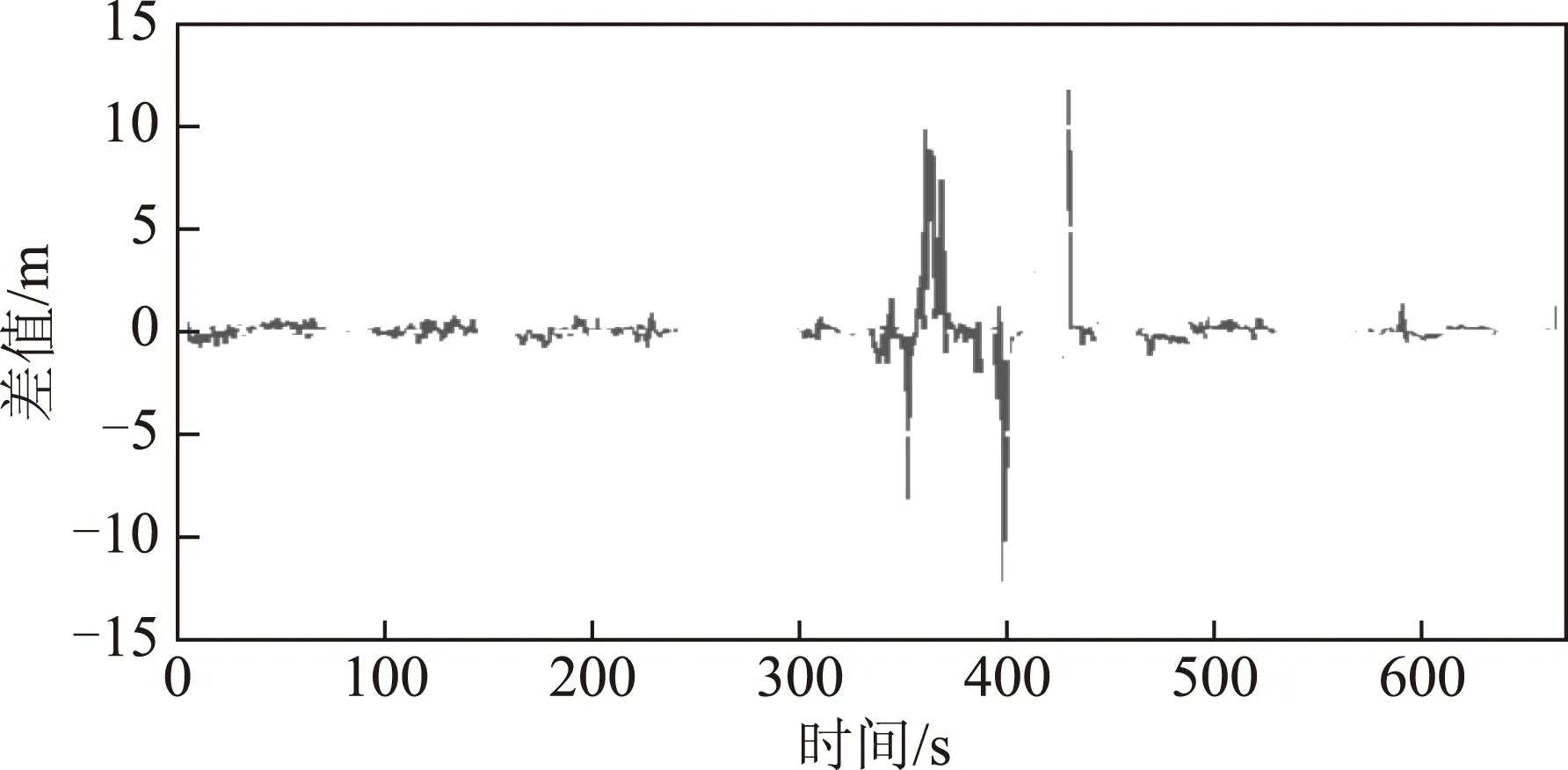
圖5 實驗組2(R1-R2)測距結果差
2.2 基于網絡的移動用戶測距
最后一組實驗建立了完整的UWB定位系統(tǒng),其中6個BU分布于實驗區(qū)域周邊(圖1中三角標出),使信號覆蓋面積最大。兩個移動用戶攜帶MU分布從環(huán)形樓道兩個不同位置出發(fā)沿樓道行走,該情況下兩用戶之間大部分時間都有至少一道墻壁遮擋,遮擋最多時的情況有兩道墻壁和設備室的所有金屬儀器架。圖(6)給出用戶的東西向坐標與南北向坐標作為位置-時間參考。
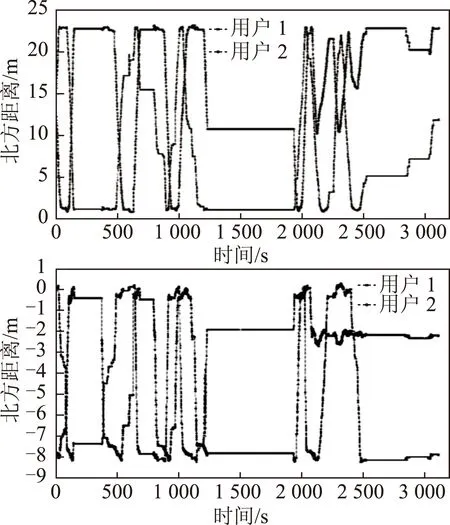
圖6 實驗組3 用戶東西向坐標與南北向坐標
該實驗的遮擋物較多,即使整個網絡設備遍布于整個實驗區(qū)域,但是MU之間、MU與BU之間信號依舊不穩(wěn)定,容易造成無法同步獲取定位、測距數據。實驗中僅從R1獲取24.5%有效數據,從R2獲取36%有效數據,其中65%的測距誤差在1 m以內。可見,在復雜環(huán)境中加入過多的基站設備,反而會造成網絡的復雜度,降低測距精度。
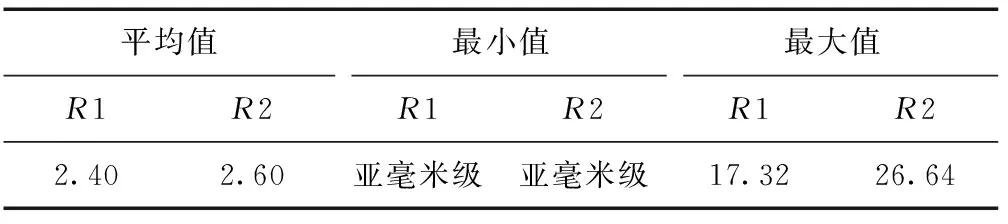
表3 實驗組3測距誤差/m

圖7 實驗組3測距誤差
通過上面三組實驗可見,在信號穩(wěn)定情況下UWB能夠提供厘米級測距;處于網絡中時,即使多個MU~BU之間為NLOS,系統(tǒng)也可能改正NLOS造成的誤差。而當環(huán)境過于復雜對信號造成較大干擾,如果不需要提供位置坐標,可減小網絡的復雜度,并識別出LOS與NLOS信號來權衡測距結果的可靠度。通過在多用戶直接加入測距信息,即可約束用戶的相對位置關系,由此限定用戶可能處于的位置,排除粗差,減小整體誤差。
3 WiFi信號強度數據庫
3.1 WiFi指紋定位
PRX(d)=Pd0-10nlog10(d)+aWAF+∞
(2)
式中,Pd0為距離發(fā)射站某參照距離的RSS(通常為1 m),n為空間信號衰減參數,WAF為墻體衰減參數,a為接收機與AP之間遮擋物的數量,∞為服從正態(tài)分布的信號噪聲。
根據此模型即可通過獲取的RSS反算出信號的傳播距離。然而在實際應用中,由于環(huán)境變化影響和硬件自身性能導致n值經常發(fā)生變化,∞誤差范圍較大,造成RSS變化大,無法通過實際測得的RSS獲取精度的距離。WiFi RSS定位方法是采用基于指紋特征識別(finger printing,F(xiàn)P)的方法來獲取位置。FP方法一般為兩步,第一步為用戶采集先驗信息,在所需定位的環(huán)境中選擇若干采樣位置,然后測量并存儲每個AP在各個采樣位置的位置坐標、信號MAC地址以及RSS等相關信息,存儲為指紋數據庫;第二部即為用戶定位,用戶在環(huán)境中任意位置獲取即時RSS信息并與指紋數據庫作比較,可采用信息最接近的指紋位置或者多個指紋位置的加權平均為當前定位位置。
該方法的精度與數據庫信息量以及更新效率有密切關系,數據庫的采樣點越多、數據庫即時更新的效率越高,定位結果也就越精確,而耗時也越長,導致基于WiFi的定位準備時間過長,信息存儲量大,不便于實時定位以及數據庫及時更新。
3.2 基于高斯過程回歸的數據庫生成
一般認為WiFi信號強度近似于高斯分布,因此可應用GPR快速生成指紋數據庫[24-25]。GPR是一種基于貝葉斯理論和統(tǒng)計學發(fā)展的機器學習方法[26],它根據訓練數據實現(xiàn)某空間區(qū)域內的高斯分布,是任意有限個均具有聯(lián)合高斯分布的隨機變量的集合。設D={(xi,yi)|i=1,2,…,n}為一組從某過程提取出的觀測量作為訓練數據,過程模型為
yi=f(xi)+ε
(3)

m(x)=E[f(x)]
(4)
k(x,x′)=E[f(x)-m(x))(f(x′)-m(x′))]
(5)
應用GPR的必要前提是在目標空間內向量間具有相關性,即RSS與測量位置和AP之間的距離及遮擋物相關。根據數據相關性,可得到預測均值方程以及協(xié)方差方程為

(6)

(7)


(8)
求得最優(yōu)超參數后,可利用式(7)及式(8)得到測試點x*的預測值及其方程。
文中利用該方法快速生成指紋數據庫,用戶在樓中僅需用15 min走一圈,將采集到的RSS信息和位置信息作為訓練數據,并根據經驗值設置信號均值以及方差等參數,利用GPML Matlab工具[27]生成每一個AP在樓層中的RSS數據。此方法生成指紋數據庫的效率比傳統(tǒng)的數據庫采集方法高,并且數據精度滿足定位需求。圖8為樓中8個AP的指紋圖,深色表示信號強度較強的區(qū)域,與實際AP所在位置符合。

圖8 GPR生成WiFi指紋數據庫
4 基于粒子濾波的協(xié)同定位算法
在WiFi定位中,即使花大量時間采集指紋數據庫,仍不可避免信號不穩(wěn)定導致的誤差,而用戶間測距信息可以約束相對定位位置,使用戶保持一個正確的相對位置從而剔除其他信息中帶來的粗差[28]。
本文利用PF集成DR、地圖信息、WiFi數據以及用戶測距等信息來提供移動用戶的導航定位。PF是一種基于蒙特卡洛方法求解貝葉斯概率估計的濾波算法,具有處理非線性非高斯系統(tǒng)等問題的優(yōu)勢,并且容易集成多種不同來源數據[29-30]。PF的狀態(tài)方程可通過離散時間隨機模型描述
xk=fk(xk-1,vk-1)
(9)
式中,xk為某時刻k的狀態(tài)向量,fk為狀態(tài)向量xk-1和噪聲vk-1的函數。PF的目的即由每個時刻獲取的觀測值向量通過逐次遞推估計狀態(tài)向量xk為
zk=hk(xk,nk)
(10)


(11)
實際上,無法直接獲取p(X0:K|Z0:K)。因此采用大量代表某狀態(tài)的粒子來代表概率密度分布,并通過遞推方式逐步改變粒子的權重以及粒子分布求出后驗PDF的最優(yōu)解。隨著粒子數的增加,粒子的概率密度可逼近后驗概率密度,然而粒子數的增加也會造成計算量增加,算法效率降低。
本文算法中,采用500個粒子來代表用戶實時位置信息,這樣既可以保證運算效率也能滿足精度要求,然后根據獲取的定位信息對粒子進行加權,算法步驟如下:
(1)初始化:在初始位置周圍生成500個粒子;
(12)
[Et-1,Nt-1]為上一時刻的位置坐標,[Et,Nt]為該時刻的位置坐標;
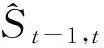
(3) 更新與加權:粒子運行過程中,如果某粒子穿越墻體到達另一房間,權值賦為0;同時根據WiFi RSS信息搜索數據庫中相似RSS指紋并提取相應位置,利用用戶間測距對指紋位置進行約束,將與距離不符的位置剔除,利用剩余指紋位置作為可能位置,根據粒子與這些位置的距離遠近進行加權,距離越近的權值越高;
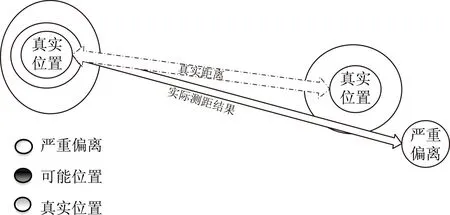
圖9 多用戶測距約束示意圖
(4)重采樣與歸一化:如果有效粒子數(權值不為0的數量)少于整體的50%,根據剩余粒子進行重采樣,重新生成500個粒子;將粒子權值歸一化,然后根據粒子的加權平均計算用戶此時的位置;
(5)返回(2)進行下一步預測,或結束。
5 實驗驗證與結果
5.1 模擬實驗設置
基于粒子濾波協(xié)同定位算法(collaborative positioning particle filtering,CPF)基于Matlab R2011a平臺,在Intel雙核3 GHz CPU的計算機上運行。為了權衡算法的精度與運行速度,采用500個粒子數。算法中加載獲取的樓層室內圖,包括室內房間墻體、出入口位置等信息,文獻[31]中給出了PF加載室內地圖的詳細算法。WiFi的指紋數據庫采用3.2方法生成,如圖8。
模擬實驗選擇3條不同路線,如圖10所示。實時DR數據的步長與航向根據用戶攜帶的低端INS設備獲取,定位采用的WiFi數據根據用戶攜帶筆記本電腦記錄在走動過程中獲取的信號數據。測距信息根據室內環(huán)境中UWB實驗獲取的數據生成。所有數據均與UTC時間同步。
圖10 實驗真實路徑/m
5.2 模擬實驗1
實驗中將路徑1(T1)與路徑2(T2)之間,T1與路徑3(T3)之間,T1、T2與T3之間應用CPF進行協(xié)同定位。由于測距誤差標準差為1 m,因此將粒子相對位置的誤差范圍設定為1 m,該范圍內的權值較高,范圍以外的粒子權值較低。CPF算法的定位結果與DR定位結果、WiFi協(xié)助DR定位結果作比較。定位誤差均方根值(root mean square,RMS)以及誤差累積分布函數值(cumulative density function,CDF)分布列于表中。
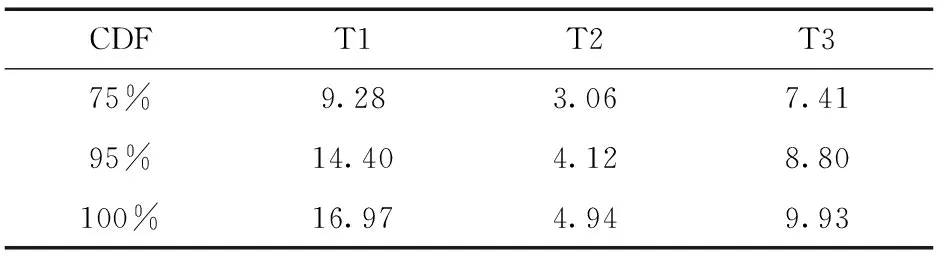
表4 DR定位誤差/m
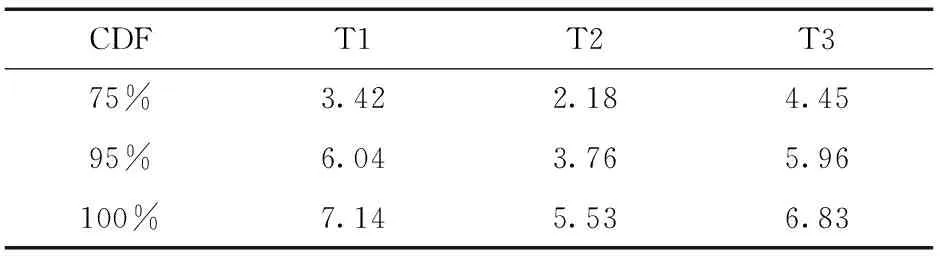
表5 DR/WiFi定位誤差/m
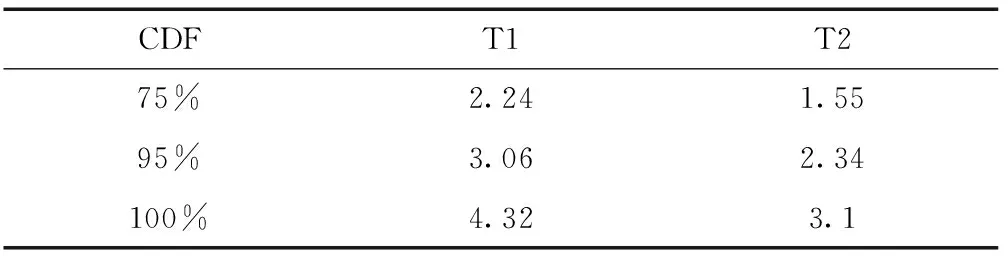
表6 兩用戶(T1、T2)協(xié)同定位誤差/m
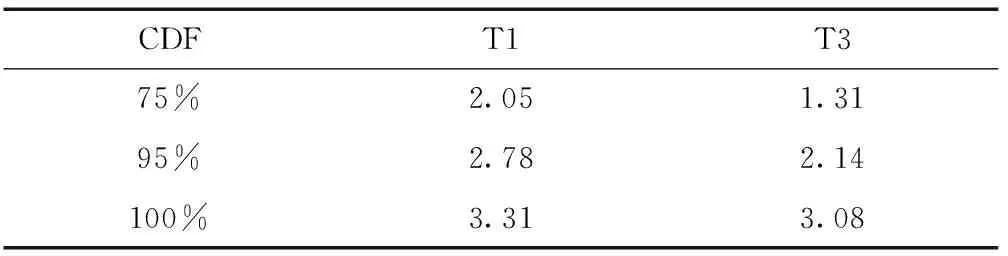
表7 兩用戶(T1、T3)協(xié)同定位誤差/m
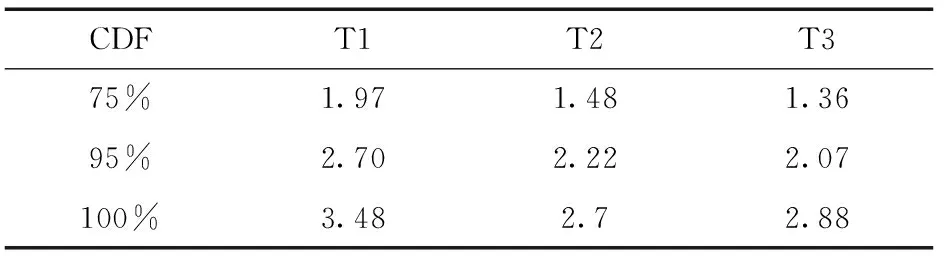
表8 三用戶協(xié)同定位誤差/m

圖11 T1+T2協(xié)同定位結果/m
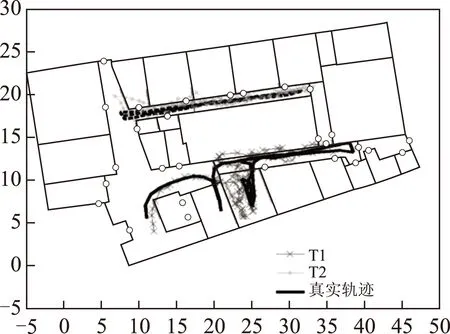
圖12 T1+T3協(xié)同定位結果/m
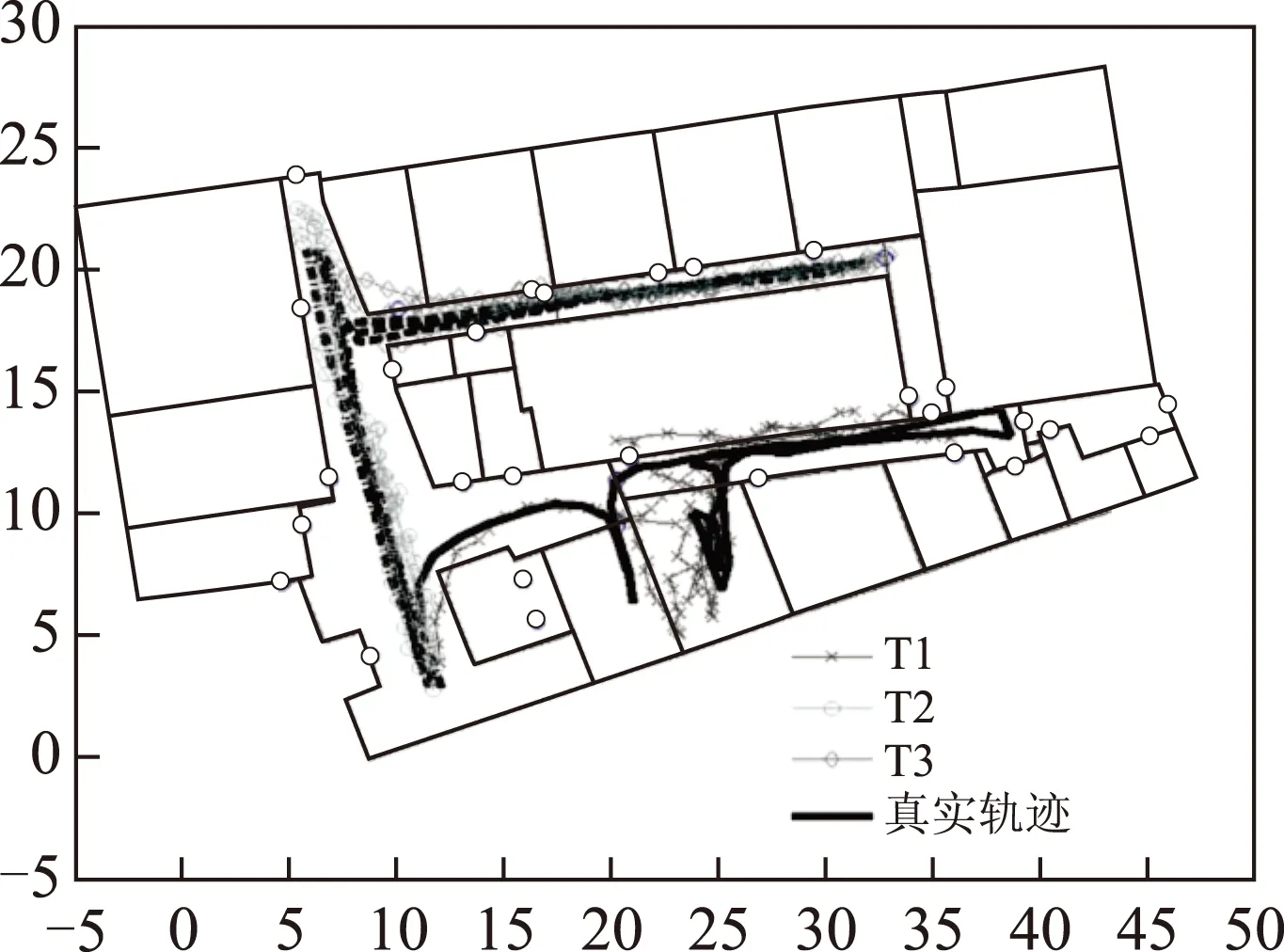
圖13 T1+T2+T3協(xié)同定位結果/m
5.3 模擬實驗2
該實驗中采用路徑與協(xié)同組合與實驗1相同,但將室內地圖約束信息去掉,即允許粒子只要在樓體以內,可穿越墻體在樓中隨機移動。
該實驗中DR與WiFi協(xié)助DR定位失敗,即定位結果誤差超過10 m,并且過多粒子移動到樓體以外造成算法極不穩(wěn)定。然而CPF算法能夠將定位結果約束在真實位置附近,大幅度減小定位誤差。定位誤差RMS的CDF分別列于表中。
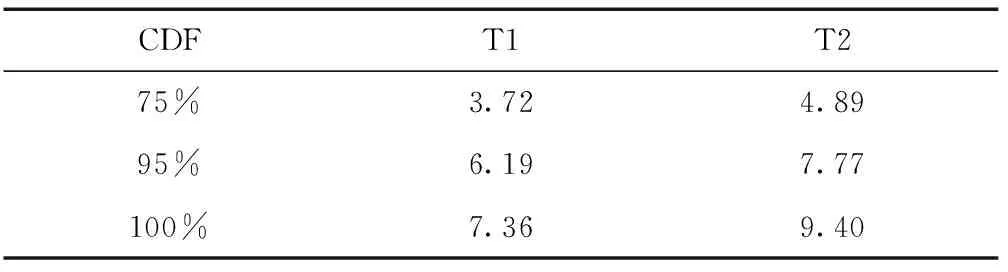
表9 兩用戶(T1、T2)協(xié)同定位誤差(無地圖信息)/m
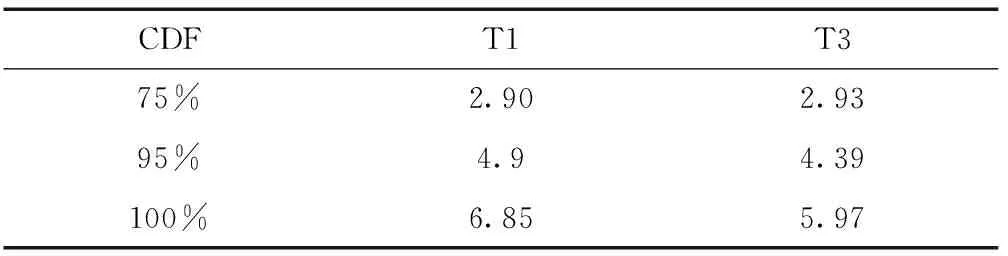
表10 兩用戶(T1、T2)協(xié)同定位誤差(無地圖信息)/m
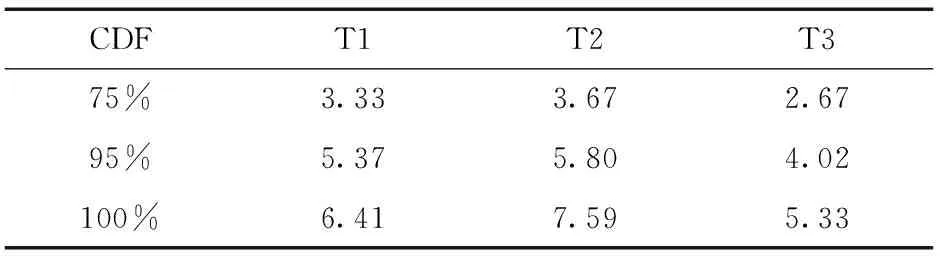
表11 三用戶協(xié)同定位誤差(無地圖信息)/m
5.4 結果說明
從定位結果可見采用GPR生成的WiFi指紋數據庫協(xié)助DR定位已對定位結果有所提高。DR結果顯示路徑T2的定位結果較高,但這主要是由于路徑恰好受樓層樓道約束,如果路徑或樓層的幾何結構發(fā)生變化,如T1和T3,定位結果就大幅度下降。
用戶之間測距約束能夠有效剔除根據指紋數據庫反饋的誤差較大的位置,其中兩用戶CPF相對DR/WiFi定位精度提高了40%,三用戶CPF定位精度提高50%。在去掉樓層室內地圖信息以后,測距約束能夠保證算法的穩(wěn)定性,并且定位精度至少達到有室內地圖信息的DR/WiFi定位水平。
后續(xù)模擬實驗通過改變測距的標準差(達3 m)以及增加用戶數量分析CPF定位精度,實驗驗證表明算法能夠處理低精度測距信息,并不會對定位結果造成太大影響,而過多用戶不一定使定位精度大幅度提高。
6 結論
本文提出了一種基于PF集成DR與WiFi信息、通過用戶間測距對位置加權的協(xié)同定位算法。文章提供了室內環(huán)境中實驗獲取的UWB測距結果,由此提出多用戶測距約束定位。其次給出了基于GPR快速生成WiFi RSS指紋數據庫的方法,減小建立定位所需數據庫的工作量。最后基于PF集成以上信息進行多用戶多傳感器協(xié)同定位,通過模擬實驗獲得定位結果并對算法進行驗證。
該CPF算法在沒有非常高精度的指紋數據庫情況下,仍可提供高精度定位結果,增強定位系統(tǒng)穩(wěn)定性,減少采集先驗數據的工作量;同時利用多用戶測距約束剔除了基于WiFi定位時由于信號不穩(wěn)定造成的粗差,最終提高定位精度,定位結果比DR/WiFi定位結果提高40%,增加為三用戶時提高50%。在沒有室內地圖信息的情況下,仍可提高較穩(wěn)定的定位結果,精度可達到有地圖信息的DR/WiFi定位水平。
實驗結果也表現(xiàn)出一些不足與問題。在實驗1中,雖然單個粒子不允許穿越墻體,但是算法不考慮歷史數據改正,因此當某時刻的粒子群分別在兩個不同房間內時,加權平均的位置可能使路徑穿過墻體,如果能實時改正這個問題可進一步提高定位精度。
測距實驗中可見,即使UWB信號在室內進行定位測距時也經常會出現(xiàn)數據無法同步,NLOS信號造成誤差變大的情況。根據獲取的數據信息來識別NLOS信息,即誤差較大的信號,并排除這些信號對測距約束的影響,也可提高定位精度與穩(wěn)定性。
該算法提供了在沒有WiFi指紋數據庫或室內地圖等先驗信息的情況下開始導航定位然后在定位過程獲取室內信息并將其存儲用于改正后續(xù)定位的可能性。未來工作應考慮提供低精度數據的檢測并排除這些信息對定位干擾。
[1] BENFORD S.Future Location-based Experiences[EB/OL].(2005-01-24)[2013-12-26].http://www.jisc.ac.uk/uploaded_documents/jisctsw_05_01.pdf.
[2] GU Yan-ying,LO A,NIEMEGEERS I.A Survey of Indoor Positioning Systems for Wireless Personal Networks[J].IEEE Communications Surveys and Tutorials,2009,11(1):13-32.
[3] ZANDBERGEN P A.Accuracy of iPhone Locations:A Comparison of Assisted GPS,WiFi and Cellular Positioning[J].Transactions In GIS,2009,13(s1):5-25.
[4] HIDE C.Integration of GPS and Low Cost INS Measurements[D].Nottingham,UK:University of Nottingham,2003.
[5] ABDULRAHIM K,HIDE C,MOORE T,et al,Aiding Low Cost Inertial Navigation with Building Heading for Pedestrian Navigation[J].Journal of Navigation,2011,64(2):219-233.
[6] CHEN Yong-guang,KOBAYASHI H.Signal Strength Based Indoor Geolocation[EB/OL].[2013-12-26].http://hisashikobayashi.com/papers/Wireless%20Geolocation%20Algorithms%20and%20Analysis/Signal%20Strength%20Based%20Indoor%20Geolocation.pdf.
[7] KAEMARUNGSI K,KRISHNAMURTHY P.Analysis of WLAN’s Received Signal Strength Indication for Indoor Location Fingerprinting[J].Pervasive and Mobile Computing,2012,8(2):292-316.
[8] NARZULLAEV A,PARK W,HOYOUL J.Accurate Signal Strength Prediction Based Positioning for Indoor WLAN Systems[C]//Proceedings of Position,Location and Navigation Symposium(2008 IEEE/ION ),CA:IEEE,2008:685-688.
[9] CHOLIZ J,HERNANDEZ-SOLANA A,VALDOVINOS A.Evaluation of Algorithms for UWB Indoor Tracking[C]//Proceedings of 8th Workshop on Positioning Navigation and Communication8th Workshop On Positioning Navigation and Communication(WPNC).Dresden:[s.n.],2011:143- 148.
[10] HARMER D.Ultra Wideband (UWB) Indoor Positioning[EB/OL].[2013-12-26].http://esamultimedia.esa.int/docs/NavigationProjects/UWB_tech_Proj_Overview.pdf.
[11] DARDARI D,CONTI A,FERNER U,et al.Ranging with Ultrawide Bandwidth Signals in Multipath Environments[EB/OL].[2013-12-26].http://wgroup.lids.mit.edu/publications/moewin/UWB%20Ranging-PIEEE-02-09.pdf.
[12] DE ANGELIS A,DWIVEDI S,HANDEL P,et al.Ranging Results Using a UWB Platform in an Indoor Environment[C]//Proceeding of 2013 International Conference on Localization and GNSS (ICL-GNSS).Turin:[s.n.],2013:1-5.
[13] SHEN Yuan,WYMEERSCH H,WIN M Z.Fundamental Limits of Wideband Localization—Part II:Cooperative Networks[J].IEEE Transactions on Information Theory.2010,56(10):4981-5000.
[14] MARANO S,GIFFORD W M,WYMEERSCH H,et al.NLOS Identification and Mitigation for Localization Based on UWB Experimental Data[J].IEEE Journal on Selected Areas in Communications,2010,28(7):1026-1035.
[15] OPPERMANN I,HMLINEN M,IINATTI J.UWB:Theory and Applications[M].Chichester:John Wiley & Sons Ltd,2005.
[16] SCHROEDER J,GALLER S,KYAMAKYA K,et al.NLOS Detection Algorithms for Ultra-wideband Localization[C]//Proceedings of 4th Workshop on Positioning,Navigation and Communication(WPNC '07).Hannover:[s.n.],2007:159-166.
[17] YAN Jun-lin ,TIBERIUS C C,BELLUSCI G,et al.Non-Line-of-Sight Identification for Indoor Positioning Using Ultra-wideBand Radio Signals[J].Navigation.2013,60(2):97-111.
[18] WYMEERSCH H,LIEN J,WIN M Z.Cooperative Localization in Wireless Networks[EB/OL].[2013-12-26].http://wgroup.lids.mit.edu/publications/moewin/Cooperative-Localization-PIEEE-02-09.pdf.
[19] CHAN Li-wei,CHIANG Ji-rung,CHEN Yi-chao,et al.Collaborative Localization:Enhancing WiFi-Based Position Estimation with Neighborhood Links in Clusters[EB/OL].[2013-12-26].http://liweichan.com/paper/pervasive06-collaboration-chan.pdf.
[20] ZHANG Bao-li,YU Feng-qi,ZHANG Zu-sheng.Collaborative Localization Algorithm for Wireless Sensor Networks using Mobile Anchors[C]//Proceedings of 2nd Asia-Pacific Conference on Computational Intelligence and Industrial Applications(PACIIA 2009).Wuhan:[s.n.],2009:309-312.
[21] KEALY A,ALAM N,TOTH C,et al.Collaborative Navigation with Ground Vehicles and Personal Navigators[C]//Proceedings of 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN).Sydney:[s.n.],2012:1-8.
[22] GUVENC?I,CHONG C C,WATANABE F,et al.NLOS Identification and Weighted Least-squares Localization for UWB Systems Using Multipath Channel Statistics[J].EURASIP Journal on Advances in Signal Processing,2008(271984):1-14.
[23] MOLISCH A F.Wireless Communications[M].Chichester:John Wiley & Sons,2010.
[24] FERRIS B,HHNEL D,FOX D.Gaussian Processes for Signal Strength-based Location Estimation[EB/OL].[2013-12-26].http://www.roboticsproceedings.org/rss02/p39.pdf.
[25] FARAGHER R M,SARNO C,NEWMAN M.Opportunistic Radio SLAM for Indoor Navigation Using Smartphone Sensors[EB/OL].[2013-12-26].http://resilientpnt.org/wp-content/uploads/Indoor-Nav-Opportunistic-Smartphone-Sensors.pdf..
[26] RASMUSSEN C E,WILLIAMS C K I.Gaussian Processes for Machine Learning[M].Cambridge:The MIT Press,2006.
[27] ANON.Documentation for GPML Matlab Code version 3.4[EB/OL].(2013-11-11)[2013-12-20].http://www.gaussianprocess.org/gpml/code/matlab/doc/.
[28] JING Hao,HIDE C,HILL C,et al.Particle Filtering in Collaborative Indoor Positioning[C]//Proceedings of 2013 China Satellite Navigation Conference (CSNC).Heidelberg:Springer-Verlag Berlin Heidelberg ,2013:633-649.
[29] RISTIC B,ARULAMPALM S,GORDON N J.Beyond the Kalman filter:Particle Filters for Tracking Applications[M].Norwood:Artech House Publishers,2004.
[30] ARULAMPALAM M S,MASKELL S,GORDON N,et al.A Tutorial On Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking[J].IEEE Transactions on Signal Processing,2002,50(2):174-188.
[31] PINCHIN J,HIDE C,MOORE T.A Particle Filter Approach to Indoor Navigation Using a Foot Mounted Inertial Navigation System and Heuristic Heading Information[C]//Proceedings of 2012 International Conference on Indoor Positioning and Indoor Navigation(IPIN).Myrtle Beach:[s.n.],2012:1-10.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
財經(2017年2期)2017-03-10 14:35:35
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
財經(2016年15期)2016-06-03 07:38:02
商用汽車(2016年4期)2016-05-09 01:23:12
財經(2016年3期)2016-03-07 07:44:46
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25