面向位置服務(wù)的室內(nèi)空間模型研究進(jìn)展
2014-01-16 05:44:08宋國民賈奮勵
導(dǎo)航定位學(xué)報 2014年4期
林 雕,宋國民,賈奮勵
(信息工程大學(xué) 地理空間信息學(xué)院,鄭州 450052)
1 引言
近年來,國際位置服務(wù)領(lǐng)域的研究熱點(diǎn)已從室外延伸到室內(nèi),我國“導(dǎo)航與位置服務(wù)科技發(fā)展十二五規(guī)劃”也明確提出了發(fā)展室內(nèi)外協(xié)同實(shí)時高精度定位和全息導(dǎo)航地圖,以解決目前位置服務(wù)存在的“最后一千米”問題。室內(nèi)位置服務(wù)需要解決的一個關(guān)鍵性問題就是室內(nèi)空間建模,目前研究人員已提出了多種室內(nèi)空間模型,但通常都只針對某一特定的應(yīng)用,很難有一個適合于所有應(yīng)用的通用室內(nèi)空間模型。文獻(xiàn)[1]從普適計算的角度對室內(nèi)空間模型作了綜述,文獻(xiàn)[2]則側(cè)重于情境感知的角度對幾何和符號兩類空間模型進(jìn)行了比較分析,文獻(xiàn)[3-4]也對室內(nèi)空間模型作了分類比較,但尚無專門從位置服務(wù)角度對室內(nèi)空間模型的綜述,本文以室內(nèi)位置服務(wù)應(yīng)用為背景,依據(jù)模型的構(gòu)造特點(diǎn)對典型室內(nèi)空間模型進(jìn)行分類剖析,詳細(xì)介紹各類模型的建模原理及優(yōu)缺點(diǎn),為開展面向室內(nèi)位置服務(wù)的空間建模研究提供借鑒。首先,闡述了室內(nèi)空間的特點(diǎn)和主要的室內(nèi)位置服務(wù)模式;然后,根據(jù)模型的構(gòu)造特點(diǎn),將現(xiàn)有空間模型劃分為幾何、符號、語義3類,并對其中的典型成果進(jìn)行了分析和評述;最后,討論了現(xiàn)有建模方法面臨的主要問題,并展望了室內(nèi)空間建模研究的發(fā)展趨勢。
2 室內(nèi)空間及其位置服務(wù)
2.1 室內(nèi)空間特點(diǎn)
室內(nèi)空間可以被非正式的定義為人們所活動的建筑環(huán)境(例如房間、會議室等)[5]。與室外空間相比,室內(nèi)空間具有其獨(dú)特性。主要表現(xiàn)在:
(1)室內(nèi)外空間尺度不同。室內(nèi)空間整體與室外空間相比是微觀的空間,室內(nèi)空間通常被認(rèn)為是小尺度的感知空間[6]。不同空間尺度上,人類對于空間有著不同的理解能力和表達(dá)方式。因此,室內(nèi)空間建模需充分考慮室內(nèi)的認(rèn)知特點(diǎn)。例如,室內(nèi)情況下通常使用更加符合用戶認(rèn)知習(xí)慣的符號化位置描述(如:302房間)。又如,室內(nèi)空間的定向更加困難,“東南西北”的定向方式在室內(nèi)已不再適用,復(fù)雜的室內(nèi)空間構(gòu)造容易使用戶轉(zhuǎn)向,特別是在跨樓層的移動情況下。
(2)室內(nèi)外空間組成要素不同。室內(nèi)空間沒有自然要素,都是人工設(shè)施[6],各類構(gòu)件繁多且功能各異。因此,室內(nèi)外空間模型所需要表達(dá)內(nèi)容有所不同。室內(nèi)空間模型需重點(diǎn)描述門、窗、樓梯、通道等室內(nèi)構(gòu)件,具體的模型抽象方式和所針對的應(yīng)用相關(guān)。
(3)室內(nèi)外空間約束有所不同。室內(nèi)空間中沒有類似于室外路網(wǎng)那樣明確的路徑信息,用戶在室內(nèi)的移動具有更大的隨意性,但同時室內(nèi)的移動又受到門、房間、走廊、樓梯等建筑物構(gòu)件的限制[3]。因此,用戶的室內(nèi)外移動習(xí)慣有所不同,在建模過程中應(yīng)將其納入考慮。例如,在房間內(nèi)部人們一般習(xí)慣從一個門徑直走到另一個可通視的門[7]。
2.2 典型室內(nèi)位置服務(wù)模式
現(xiàn)有的室內(nèi)空間模型主要應(yīng)用于機(jī)器人導(dǎo)航、地理信息系統(tǒng)(geographic information system,GIS)、普適計算等領(lǐng)域[2]。不同應(yīng)用領(lǐng)域?qū)R蟛煌1疚闹攸c(diǎn)關(guān)注面向位置服務(wù)的室內(nèi)空間模型。目前,室內(nèi)空間模型的位置服務(wù)模式主要有以下五種[1-2]:
位置查詢:提供移動或靜止的空間實(shí)體位置信息。它是實(shí)現(xiàn)其它相關(guān)位置服務(wù)的基礎(chǔ),沒有位置信息的支持,其它的位置服務(wù)則無法實(shí)現(xiàn)。
導(dǎo)航:根據(jù)用戶提出的要求查找符合條件的興趣點(diǎn)并提供到達(dá)該點(diǎn)的相關(guān)路徑信息。常見的導(dǎo)航任務(wù)是提供一條到達(dá)指定地點(diǎn)的最短或最省時的路徑。
范圍查詢:用于查找一個用戶指定范圍或區(qū)域內(nèi)空間實(shí)體的相關(guān)信息。常見的應(yīng)用就是信息推送,如向指定范圍內(nèi)的人群推送廣告信息。
最鄰近查詢:根據(jù)要求,查找n個距離指定位置最近的空間實(shí)體信息。例如,一個用戶可以搜索距他當(dāng)前位置最近的餐館信息。
可視化:通常以地圖的形式實(shí)現(xiàn),制圖是空間模型最顯著的應(yīng)用之一,一般來說,前文所提的導(dǎo)航、范圍查詢等均需借助地圖來實(shí)現(xiàn)。地圖的繪制則需要在空間實(shí)體的幾何信息支持下完成。
綜合考慮室內(nèi)空間自身特性與室內(nèi)位置服務(wù)的應(yīng)用需求可知,傳統(tǒng)的室外空間模型已不能完全適用于室內(nèi)位置服務(wù),例如,室內(nèi)的位置描述、路網(wǎng)構(gòu)建和室外均有所不同,需結(jié)合室內(nèi)空間特點(diǎn)探討適合室內(nèi)位置服務(wù)的空間模型。
3 面向室內(nèi)位置服務(wù)的空間模型
目前,國內(nèi)外已提出了眾多的室內(nèi)空間模型,研究者們從不同的角度提出了多種分類方式,其中,文獻(xiàn)V[1-2]將其分類為幾何模型和符號模型兩類,二者分別從普世計算和情境感知的角度對這兩類模型作了進(jìn)一步的分析,文獻(xiàn)[3]則按照空間模型描述對象的不同,將其分為對象特征模型、幾何模型以及符號模型三類,文獻(xiàn)[4]中則提出可將當(dāng)前空間模型粗略區(qū)分為語義模型、拓?fù)淠P汀缀文P汀⒒旌夏P退念悺2煌诸惙绞礁饔衅鋬?yōu)缺點(diǎn),側(cè)重點(diǎn)也有所不同,本文在參照已有模型分類方法的基礎(chǔ)上,從面向位置服務(wù)的角度出發(fā),根據(jù)模型的構(gòu)造特點(diǎn)將其大致分為幾何空間模型、符號空間模型、語義空間模型三類。
3.1 幾何模型
幾何空間模型通常是對室內(nèi)實(shí)體做一個幾何的描述,它以坐標(biāo)的形式為模型提供精確的幾何信息。依據(jù)表示形式不同分為基于邊界的模型和基于格網(wǎng)的模型兩類。
3.1.1 基于邊界的模型
基于邊界的模型將室內(nèi)實(shí)體通過歐式空間的點(diǎn)、線、面、體來描述,每個空間實(shí)體表示為一個坐標(biāo)集。傳統(tǒng)的計算機(jī)輔助設(shè)計(computer aided design,CAD)室內(nèi)平面圖是目前最為常見的一類室內(nèi)幾何模型,一般用于建筑工程領(lǐng)域,包含有諸多室內(nèi)構(gòu)件的幾何信息。另外,由國際協(xié)同聯(lián)盟(international alliance for interoperability,IAI)提出的工業(yè)基礎(chǔ)類(industry foundation class,IFC)數(shù)據(jù)模型標(biāo)準(zhǔn)作為建筑信息模型的一個主要數(shù)據(jù)交換標(biāo)準(zhǔn),采用了實(shí)體模型的表達(dá)機(jī)制來描述室內(nèi)構(gòu)建幾何信息,主要用于建筑工程管理。城市地理標(biāo)記語言(city geography markup language,CityGML)的多細(xì)節(jié)層次4(levels of detail 4,LOD4)則是由開放地理信息聯(lián)盟提出的室內(nèi)3維空間數(shù)據(jù)模型,相比較IFC模型而言更加接近于GIS的應(yīng)用,采用了表面模型的3維幾何模型表達(dá)機(jī)制,主要用于對室內(nèi)空間的可視化。
盡管邊界模型能夠提供豐富的室內(nèi)幾何數(shù)據(jù),但一般不能將其直接用于導(dǎo)航、范圍查詢等室內(nèi)位置服務(wù)。目前,主要將其用作其他空間模型的數(shù)據(jù)源。例如,文獻(xiàn)[8]基于CAD室內(nèi)模型構(gòu)建了室內(nèi)拓?fù)淠P停⑵鋺?yīng)用于導(dǎo)航;文獻(xiàn)[9]在IFC的基礎(chǔ)下,提取實(shí)體邊界信息并將其格網(wǎng)化到2維平面實(shí)現(xiàn)了室內(nèi)的路徑規(guī)劃。
3.1.2 基于格網(wǎng)的模型
基于格網(wǎng)的空間模型通過對室內(nèi)空間的格網(wǎng)分割實(shí)現(xiàn)。包括有規(guī)則格網(wǎng)分割和不規(guī)則格網(wǎng)分割。其中規(guī)則分割將空間用形狀和大小相同的幾何圖形進(jìn)行分割,常見的有正方形和六角形分割。這種分割方式廣泛的應(yīng)用于機(jī)器人導(dǎo)航領(lǐng)域它提供了一個具有連續(xù)幾何特性的空間模型,并支持不同類型的基于幾何的空間查詢和格網(wǎng)交互。另外,還可在格網(wǎng)分割的基礎(chǔ)下建立基于格網(wǎng)的圖模型,用于路徑導(dǎo)航和空間分析。文獻(xiàn)[10]提出的2維室內(nèi)空間格網(wǎng)圖模型,不僅能夠表示空間幾何信息,也可表示空間的結(jié)構(gòu)屬性和不同抽象層次的拓?fù)潢P(guān)系,還可以用于室內(nèi)尋路和擴(kuò)散分析。一般來說,格網(wǎng)分割越細(xì)模型的幾何精度越高,但存在的問題就是格網(wǎng)越多所占的內(nèi)存越大,查詢和服務(wù)效率則會相對降低。不規(guī)則格網(wǎng)空間分割則是根據(jù)相應(yīng)的原則將空間分割成不規(guī)則的多邊形,常見的有三角格分割、Voronoi多邊形分割等,常用于室內(nèi)的壁障導(dǎo)航。文獻(xiàn)[11]提出了一種對室內(nèi)空間的三角格網(wǎng)劃分,通過構(gòu)建基于三角格網(wǎng)的圖模型實(shí)現(xiàn)了高效的壁障路徑查詢,但是該模型適用范圍有限不能夠直接支持范圍查詢、最鄰近查詢等位置服務(wù)。另一類基于Voronoi多邊形分割的空間模型被廣泛的用于諸多領(lǐng)域,文獻(xiàn)[12]提出了一個分級的基于Voronoi多邊形的路徑圖模型構(gòu)建方法,并將其應(yīng)用于室內(nèi)導(dǎo)航和路徑描述,然而這種模型的構(gòu)建和維護(hù)并不容易,目前也不能實(shí)現(xiàn)Voronoi多邊形的自動構(gòu)建。
相對于規(guī)則格網(wǎng)而言,不規(guī)則格網(wǎng)空間分割更加的靈活,室內(nèi)尋路的效率要高于規(guī)則格網(wǎng),存在的問題就是模型構(gòu)造依賴于具體的空間分割算法,建模過程比較繁瑣,且不能提供高精度的位置信息。
3.2 符號模型
符號模型將室內(nèi)空間的所有對象表示為帶有特定ID標(biāo)記的符號元素,一般用于描述對象之間的拓?fù)潢P(guān)系,主要包括基于集合的模型和基于圖的模型。
3.2.1 基于集合的模型
基于集合的模型首先給空間或?qū)嶓w一個符號標(biāo)識,然后依據(jù)空間之間的包含關(guān)系將不同空間標(biāo)識組成集合和子集,建立一個分級的空間模型。例如,一個超市被定義為一個樓層編號的集合,每一個樓層都有一個與之關(guān)聯(lián)的子集,每個子集中包括該樓層內(nèi)所有的房間編號。其中具有代表性的就是文獻(xiàn)[13]所提的基于集合的語義拓?fù)淠P停撃P兔枋隽丝臻g之間的包含與連通關(guān)系,并可用于室內(nèi)位置查詢,主要缺點(diǎn)在于缺少對空間幾何信息的描述。另外,這種樹狀結(jié)構(gòu)模型不允許一個元素同時繼承于多個父類,例如,一個房間可包含于某個樓層中,也可以包含于建筑物的一個側(cè)翼,基于概念格的模型則很好的解決了子類空間的多元繼承問題。圖1表示了一個示例的基于概念格的空間模型,圖1(a)表示該建筑物B的組成部分包括有樓層F1和F2以及兩個側(cè)翼W1和W2,該區(qū)域內(nèi)共有R1到R5五個房間。圖1(b)則是圖1(a)所對應(yīng)的基于概念格的集合模型,該模型中的空間區(qū)域可以通過多個空間標(biāo)識的集合加以表示,重疊的空間區(qū)域則被定義為兩個集合之間的交集,其中編號為FiWj的空間表示樓層Fi與側(cè)翼Wj的交叉空間。文獻(xiàn)[14]提出了基于“位置·出口”的概念格空間模型,將室內(nèi)抽象成位置和出口兩類對象,并基于概念格理論建立了空間的連接關(guān)系,該模型可以用于室內(nèi)的最鄰近查詢和語義室內(nèi)導(dǎo)航。
基于集合的模型可用于支持室內(nèi)范圍查詢、最鄰近查詢、導(dǎo)航等位置服務(wù),但通常情況下該模型只是對空間的定性描述,缺少坐標(biāo)、距離等定量信息,難以滿足高精度的位置查詢、路徑導(dǎo)航等位置服務(wù)需求。
3.2.2 基于圖的模型
基于圖的模型將室內(nèi)空間表示為一個圖G=(V,E),其中V(vertices)表示預(yù)先定義好的位置(如:某個場所或是某個興趣點(diǎn)),E(edge)表示兩個位置之間可通行的直接連接關(guān)系。圖2所描述的是一類最簡單的室內(nèi)圖模型,它將房間和通道等空間抽象為節(jié)點(diǎn),將連接房間與通道的門抽象為邊,該模型明確表示了空間的連通關(guān)系,可直接用于室內(nèi)最鄰近查詢,給節(jié)點(diǎn)和邊賦權(quán)值后還可用于室內(nèi)的導(dǎo)航和范圍查詢。單純的圖模型只能表示空間的拓?fù)潢P(guān)系,缺少距離等幾何信息。針對該問題,文獻(xiàn)[15]提出了室內(nèi)3維網(wǎng)絡(luò)模型實(shí)現(xiàn)了幾何信息和拓?fù)湫畔⒌慕y(tǒng)一表達(dá),模型主要構(gòu)建原理是通過對偶圖的方法將3維空間實(shí)體(如房間)轉(zhuǎn)換成0維的點(diǎn),將2維的面轉(zhuǎn)換成1維的線從而構(gòu)建一個可表示空間拓?fù)潢P(guān)系的2維圖模型,并通過中軸變換的方法提取多邊形的線性特征來獲取2維圖的幾何信息(如圖3所示)。幾何圖的建模方法廣泛的應(yīng)用于室內(nèi)導(dǎo)航[16-19]。根據(jù)空間抽象方式的不同,可進(jìn)一步將其分為“房間·房間”圖模型[8,20]和“門·門”圖模型[21-23]兩類,其中房間圖模型將房間抽象表示為節(jié)點(diǎn),房間之間的門表示為邊,門圖模型則將門表示為節(jié)點(diǎn),門之間的連接表示為邊。相對于房間圖模型而言后者可支持非繞行的室內(nèi)尋路,還可通過增加可視點(diǎn)的方式[21]確保節(jié)點(diǎn)之間的通視。
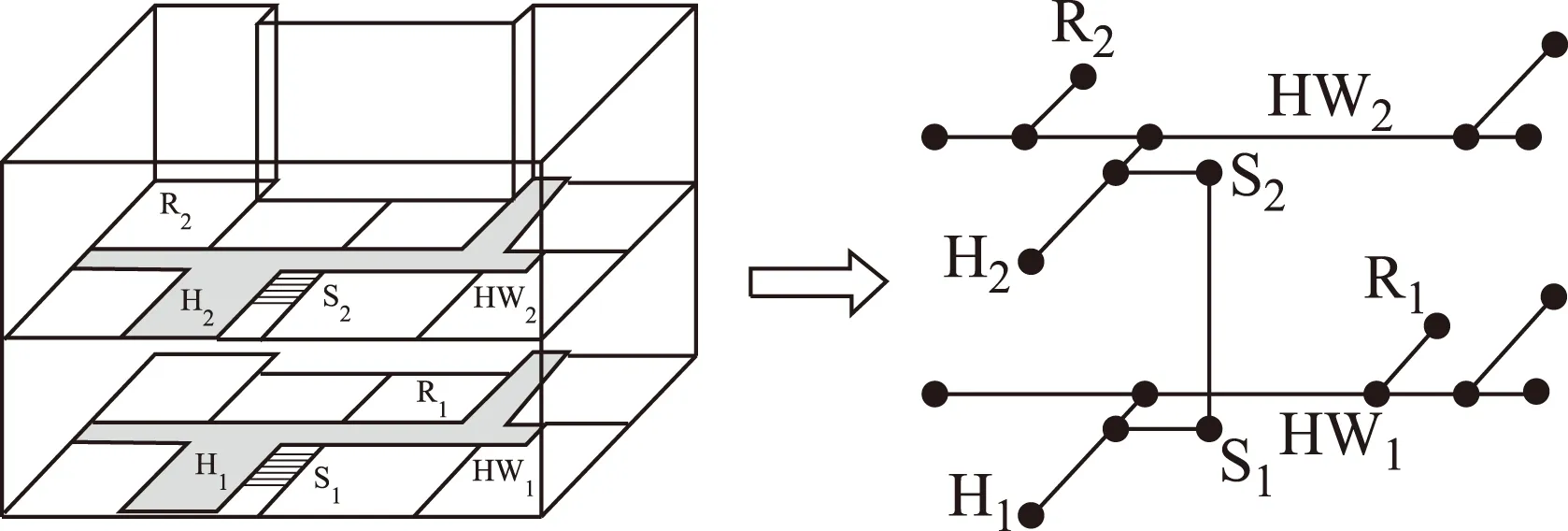
圖3 建筑物和其對應(yīng)的3維空間模型示意圖[15]
盡管幾何圖模型存在多方面的優(yōu)點(diǎn),但是對于復(fù)雜結(jié)構(gòu)的建筑物而言不能實(shí)現(xiàn)模型的自動構(gòu)建。另外,當(dāng)模型應(yīng)用于范圍查詢時只能返回預(yù)先定義的節(jié)點(diǎn)空間信息而不能得到其他抽象層次的查詢結(jié)果,解決的方法可以將圖模型通過分級的方式組織,構(gòu)建不同抽象層次的圖模型[20]。
3.3 語義模型
語義模型通過對不同類型室內(nèi)空間對象的區(qū)分,重點(diǎn)描述各類空間對象的屬性、操作以及相互之間的關(guān)系,不僅包括描述性的功能還包括空間推理功能,通常和本體論相聯(lián)系。文獻(xiàn)[13]較早的提出了室內(nèi)本體構(gòu)建的問題,但沒有給出具體的本體模型構(gòu)建方式。文獻(xiàn)[24]基于本體理論提出了室內(nèi)導(dǎo)航本體模型,該模型主要用于個性化的室內(nèi)導(dǎo)航,依據(jù)各路徑組成片段不同的語義描述,將室內(nèi)空間區(qū)分為水平過道、移動過道、空間出口、電梯出口等,并建立用戶本體及兩者之間的規(guī)則,實(shí)現(xiàn)了個性化的路徑選擇。該模型有別于IFC中對室內(nèi)空間實(shí)體的區(qū)分方式,建模過程中重點(diǎn)表示了與路徑相關(guān)的實(shí)體語義信息。文獻(xiàn)[25]則基于IBM模型,利用其豐富的語義信息,并結(jié)合智能導(dǎo)航應(yīng)用需求構(gòu)建了室內(nèi)導(dǎo)航本體模型。不同于其他模型,該模型將窗戶表示為一個特殊的路徑點(diǎn)以便支持緊急情況下的室內(nèi)逃生。文獻(xiàn)[26]基于本體理論,針對美國殘疾法案(American disability act,ADA)標(biāo)準(zhǔn)下的不同類型用戶需求,提出了用于室內(nèi)空間尋路的本體模型并給出了對應(yīng)的尋路算法。文獻(xiàn)[27]則分別從概念空間、定性空間、定量空間來描述室內(nèi)領(lǐng)域本體層三個不同方面的特性,例如對于一個門而言,概念空間描述了門的材料和顏色,定性空間描述了門和墻的相鄰關(guān)系以及指定門所屬的房間號等,定量空間則描述了門的長、寬、高以及具體的位置。文獻(xiàn)[28]則提出在頂層、領(lǐng)域、任務(wù)、應(yīng)用四個級別的室內(nèi)外一體本體建模框架,并重點(diǎn)介紹了其中的室內(nèi)結(jié)構(gòu)本體模型和導(dǎo)航任務(wù)本體模型,為實(shí)現(xiàn)室內(nèi)外一體的位置服務(wù)研究提供了一個較好的思路。
基于本體的室內(nèi)語義模型可以用于支持室內(nèi)的空間推理,常用于個性化的室內(nèi)導(dǎo)航服務(wù),也可以在一定程度的上支持位置查詢、范圍查詢、最鄰近查詢等位置服務(wù),通常將其與圖模型相結(jié)合以實(shí)現(xiàn)更加精細(xì)化的室內(nèi)位置服務(wù)。其他一些文獻(xiàn)[1-2]中也有將基于本體的室內(nèi)空空間模型歸類為符號模型,文獻(xiàn)[3]則將其稱之為對象特征模型,本文將其看作是一類單獨(dú)的室內(nèi)空間模型主要是為了突出這類模型的本體推理功能。因?yàn)橄鄬τ谑彝舛裕覂?nèi)需更加強(qiáng)調(diào)個性化的位置服務(wù)[26],將更多的上下文信息納入室內(nèi)位置服務(wù)的考慮當(dāng)中,而本體建模則是其有效的實(shí)現(xiàn)手段之一。
4 結(jié)束語
隨著室內(nèi)數(shù)據(jù)采集、室內(nèi)定位、室內(nèi)地圖制作等相關(guān)技術(shù)的成熟以及對室內(nèi)空間認(rèn)知等理論的深入研究,將進(jìn)一步的促進(jìn)室內(nèi)位置服務(wù)的發(fā)展,作為實(shí)現(xiàn)室內(nèi)位置服務(wù)的基礎(chǔ)與核心,室內(nèi)空間建模已經(jīng)成為位置服務(wù)領(lǐng)域的研究熱點(diǎn)之一,并取得了一定的研究進(jìn)展。盡管如此,面向位置服務(wù)的室內(nèi)空間建模方面仍面臨許多困難與挑戰(zhàn),有待進(jìn)一步研究和解決,主要體現(xiàn)在以下3個方面:
(1)當(dāng)前室內(nèi)模型通常針對某一特定的應(yīng)用領(lǐng)域,只表達(dá)了部分的室內(nèi)空間信息,應(yīng)用范圍有限,如何綜合考慮幾何、拓?fù)洹⒄Z義三類信息,構(gòu)建一個可擴(kuò)展、適用于多應(yīng)用的室內(nèi)空間模型還有待進(jìn)一步研究。
(2)現(xiàn)有的室內(nèi)空間模型不能滿足室內(nèi)外一體的位置服務(wù)應(yīng)用需求,例如室內(nèi)外一體的導(dǎo)航要求構(gòu)建室內(nèi)外一體的路網(wǎng)模型。因此,構(gòu)建室內(nèi)外一體的空間模型是未來需要重點(diǎn)關(guān)注的問題之一。
(3)效率是建模的一個重要影響因素,現(xiàn)有幾何模型(如IFC模型、GityGML等)可以作為室內(nèi)建模的重要數(shù)據(jù)源,但是如何有效利用現(xiàn)有幾何模型,實(shí)現(xiàn)面向位置服務(wù)的室內(nèi)空間模型的自動構(gòu)建問題還沒有得到很好的解決。例如,目前的室內(nèi)網(wǎng)絡(luò)模型構(gòu)建的自動化程度仍然不高,下一步需集中研究如何有效減少建模的工作量,提高建模的效率。
[1] BECKER C,DüRR F.On Location Models for UbiquitousComputing[EB/OL].[2014-08-02].ftp://inf.informatik.uni-stuttgart.de/pub/library/ncstrl.ustuttgart_fi/ART-2005-19/ART-2005-19.pdf.1.
[2] AFYOUNI I,RAY C,CLARAMUNT C.Spatial Models for Indoor and Context-aware Navigation Systems:A survey[J].Journal of Spatial Information Science(JOSIS),2012,4(1):85-123.
[3] 趙磊,金培權(quán),張藍(lán)藍(lán),等.LayeredModel:一個面向室內(nèi)空間的移動對象數(shù)據(jù)模型[J].計算機(jī)研究與發(fā)展,2011,48(S1):274-281.
[4] WORBOYS M.Modeling Indoor Space[C]//Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness.Chicago:ACM,2011:1-6
[5] LI K J.Indoor Space:A New Notion of Space[C]//Web and Wireless Geographical Information Systems Lecture Notes in Computer Science.Berlin:Springer Berlin Heidelberg,2008:1-3.
[6] 張?zhí)m,王光霞,袁田,等.室內(nèi)地圖研究初探[J].測繪與空間地理信息,2013,36(9):43-47.
[7] LIU Liu,ZLATANOVA S.A “door-to-door” Path Finding Approach for Indoor Navigation[C]//Proceedings of GeoInformation for Disaster Management Conference 2011.Antalya:[s.n],2011:3-8.
[8] GILLIERON P Y,MERMINOD B.Personal Navigation System for Indoor Applications[C]//Proceedings of 11th International Association of Institutes of Navigation(IAIN)World Congress.Berlin:[s.n.],2003:21-24.
[9] LIN Ya-hong,LIU Yu-shen,GAO Ge,et al.The IFC-based Path Planning for 3D Indoor Spaces[J].Advanced Engineering Informatics,2013,27(2):189-205.
[10] LI Xiang,CLARAMUNT C,RAY C.A Grid Graph-based Model for the Analysis of 2D Indoor Spaces[J].Computers,Environment and Urban Systems,2010,34(6):532-540.
[11] DEMYEN D,BERO M.Efficient Triangulation-based Pathfinding[EB/OL].[2014-08-02].https://skatgame.net/mburo/ps/tra.pdf.
[12] WALLGRUN J O.Autonomous Construction of Hierarchical Voronoi-based Route Graph Representations[C]//Proceedings of the 4th International Conference on Spatial Cognition:Reasoning,Action,Interaction.Berlin:Springer-Verlag Berlin,Heidelberg,2005:413-433.
[13] BRUMITT B,SHAFER S.Topological World Modeling Using Semantic Spaces[EB/OL].[2014-08-02].//http://www.teco.edu/locationws/10.pdf.
[14] LI Dan-dan,LEE D L.A Lattice-based Semantic Location Model for Indoor Navigation[C]//Proceedings of 9th International Conference on Mobile Data Management(MDM'08).Beijing:IEEE,2008:17-24.
[15] LEE J.A Three-dimensional Navigable Data Model to Support Emergency Response in Microspatial Built-environments[J].Annals of the Association of American Geographers,2007,97(3):512-529.
[16] THILL J C,DAO T H D,ZHOU Yu-hong.Traveling in the Three-dimensional City:Applications in Route Planning,Accessibility Assessment,Location Analysis and beyond[J].Journal of Transport Geography,2011,19(3):405-421.
[17] 徐效波,吳華玲,郭先春,等.交通網(wǎng)絡(luò)的建筑物內(nèi)部三維網(wǎng)絡(luò)模型[J].測繪科學(xué),2013,38(6):1-3.
[18] LEE J,ZLATANOVA S.A 3D Data Model and Topological Analyses for Emergency Response in Urban Areas[EB/OL].[2014-08-02].http://www.gdmc.nl/publications/2008/3D_data_model_topological_analyses.pdf.
[19] BECKER T,NAGEL C,KOLBE T H.Supporting Contexts for Indoor Navigation Using a Multilayered Space Model[C]//Proceedings of 10th International Conference on Mobile Data Management:Systems,Services and Middleware(MDM'09).Taipei:IEEE,2009:680-685.
[20] LORENZ B,OHLBACH H J,STOFFEL E P.A Hybrid Spatial Model for Representing Indoor Environments[C]//Web and Wireless Geographical Information Systems.Berlin:Springer-Verlag Berlin,Heidelberg,2006:102-112.
[21] GOETZ M,ZIPF A.Formal Definition of a User-adaptive and Length-optimal Routing Graph for Complex Indoor Environments[J].Geo-Spatial Information Science,2011,14(2):119-128.
[22] LIU Liu,ZLATANOVA S.A Two-level Path-finding Strategy for Indoor Navigation[C]//Intelligent Systems for Crisis Management.Berlin:Springer-Verlag Berlin,Heidelberg,2013:31-42.
[23] YUAN Wen-jie,SCHNEIDER M.iNav:An Indoor Navigation Model Supporting Length-dependent Optimal Routing[C]//Geospatial Thinking.Berlin:Springer-Verlag Berlin,Heidelberg,2010:299-313.
[24] TSETSOS V,ANAGNOSTOPOULOS C,KIKAIRAS P,et al.Semantically Enriched Navigation for Indoor Environments[J].International Journal of Web and Grid Services,2006,2(4):453-478.
[25] LI Yuan,HE Zi-zhang.3D Indoor Navigation:a Framework of Combining BIM with 3D GIS[EB/OL].[2014-08-02].http://www.isocarp.net/Data/case_studies/1187.pdf.
[26] DUDAS PM,MAHSA G,KARIMI H.ONALIN:Ontology and Algorithm for Indoor Routing[C]//Proceedings of 10th International Conference on Mobile Data Management:Systems,Services and Middleware(MDM '09).Taipei:IEEE,2009:720-725.
[27] BHATT M,DYLLA F,HOIS J.Spatio-terminological Inference for the Design of Ambient Environments[C]//Spatial Information Theory.Berlin:Springer-Verlag Berlin,Heidelberg,2009:371-391.
[28] YANG Li-ping,WORBOYS M.A Navigation Ontology for Outdoor-indoor Space:(Work-in-progress)[EB/OL].[2014-08-02].http://www.worboys.org/publications/ISA2011Yang.pdf.
猜你喜歡
青年文學(xué)家(2022年2期)2022-03-17 21:57:14
河北畫報(2021年2期)2021-05-25 02:06:46
開放教育研究(2020年2期)2020-03-31 01:54:14
中華手工(2017年2期)2017-06-06 23:00:31
燈與照明(2016年4期)2016-06-05 09:01:45
現(xiàn)代語文(2016年21期)2016-05-25 13:13:44
工業(yè)設(shè)計(2016年4期)2016-05-04 04:00:18
大連民族大學(xué)學(xué)報(2015年2期)2015-02-27 08:28:11
中外會展(2014年4期)2014-11-27 07:46:46
外語學(xué)刊(2011年1期)2011-01-22 03:38:33