小型挖掘機儀表電子控制單元的設計與實現
2014-01-21 06:53:20陳揚
機電產品開發與創新 2014年2期
陳 揚
(南京理工大學 自動化學院,江蘇 南京 210094)
0 引言
隨著我國經濟快速增長,交通運輸、建筑等領域工程建設量的加大,推動了挖掘機市場的飛速發展。小型挖掘機依靠其靈活小巧、機動性強、功能豐富等優勢,成為工程應用的理想選擇。電子控制系統作為液壓挖掘機的重要配套系統,是小型挖掘機技術發展和功能改善的關鍵,一般具有控制、遠程管理、監測與報警、照明等功能[1]。國產挖掘機電控技術與國外先進水平相比還有較大差距,只有少數廠家生產的小型挖掘機選用國產控制器,且只具備一般監控功能與相對簡單的節能控制技術,可靠性、可擴展性不強[2]。本文以沃爾沃小型挖掘機電控設備國產化為背景,以飛思卡爾Kinetis 系列微控制器為硬件平臺,設計了一款應用于沃爾沃小型挖掘機EC60C 的儀表電子控制單元(以下簡稱“IECU”)。IECU負責采集挖掘機各種工況參數,如冷卻液溫度、燃油液位、發動機轉速、機油壓力等,并通過人機交互界面實現工況參數實時顯示、代碼鎖定和選項設定,同時還具備報警與工作時間保存功能。其與車載電子控制單元(以下簡稱 “VECU”) 等通過CAN 總線連接在一起,共同組成了EC60C 的電子控制系統。該IECU 易于閱讀,可使操作狀態檢查更快捷,工作效率更高。
1 系統組成與工作原理
IECU 以飛思卡爾MK10DN512VLL10 為控制核心,外擴脈沖信號采集電路、開關與模擬量采集電路、鍵盤電路、CAN 總線接口電路、步進電機與LED 驅動電路。其使用LCD、步進電機和LED 作為儀表顯示部件,磁電存儲器用于存儲重要數據,并通過CAN 總線與VECU進行信息交互。IECU 整個系統的組成如圖1 所示。
IECU 通過開關量、模擬量與脈沖信號量采集電路采集外部開關、傳感器、交流電機P 端子傳來的各種工作參數并由MCU 做相應的判斷與處理。采集的工況參數與信號類別如表1 所示。

圖1 IECU 系統結構框圖Fig.1 Diagram of IECU system
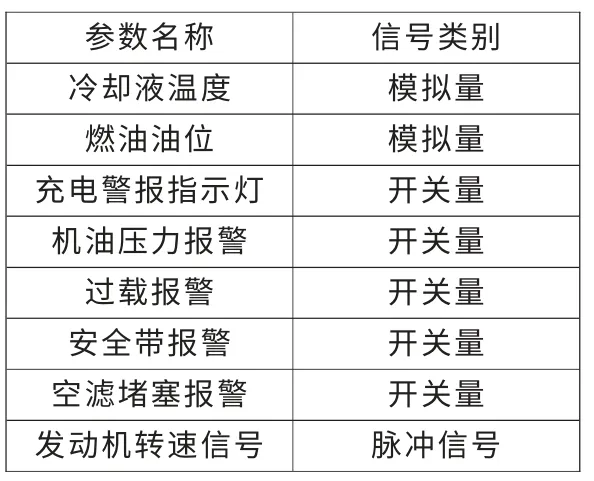
表1 工況參數及其信號類別Tab.1 Working parameters and classification
當要執行某項操作時,操作員先通過鍵盤上的滾動鍵與確認鍵選擇功能菜單中對應選項,儀表盤上相應的LED 指示燈便會閃爍提醒,IECU 將相應的操作碼通過CAN 總線發送給VECU。與此同時,VECU 采集其外部開關(包括控制桿開關與手柄開關等)或傳感器的狀態,若同時滿足一定條件,則VECU會激勵電磁閥或繼電器完成相應的操作,如自動怠速、動臂偏置選擇等。
2 硬件設計
2.1 基于ARM Cortex-M4 的Kinetis 微控制器
ARM Cortex-M4 是由ARM 開發的最新嵌入式處理器,在M3 內核基礎上強化了運算能力,增加了浮點、DSP等功能。MK10DN512VLL10 搭 載ARM Cortex-M4內核,是Kinetis 系列微控制器的入門芯片。其最高工作頻率達100MHz,內 置512KB 的Flash存儲器與128KB 的RAM,包含2 個16 位精度ADC 模塊、可編程延時模塊、8 通道PWM、SPI、CAN、UART 等豐富資源,并融合了最新的低功耗革新技術[3]。
2.2 步進電機模塊設計
本次設計的IECU 中的冷卻液溫度表和燃油油位表使用指針方式來指示。步進電機作為驅動元件帶動指針轉動,其轉角與冷卻液溫度、燃油油位成正比。使用PWM 數字控制方式調速,具有抗干擾能力強、控制性能好、無累積誤差的優點[4]。步進電機可選擇Wellgain公司的VID29 系列步進電機,其可選擇分步模式或微步模式驅動。微步模式下輸出軸的步距角最小可達到(1/12)°的高精度,最大轉動角速度可達600°/s。儀表步進電機的驅動芯片可選擇同公司的VID66-08。該驅動芯片可控制步進電機以微步轉動,同時驅動兩路電機,適用于汽車儀表、航空儀表等。VID66-08 的驅動電路如圖2 所示。

圖2 步進電機驅動電路Fig.2 Drive circuit of stepper motor
其中F(scx)A、F(scx)B 為驅動脈沖輸入端,可用PWM驅動。CW/CCWA、CW/CCWB 控制步進電機轉動方向。其中M1 用作燃油油位表,M2 用作冷卻液溫度表。
2.3 LED 驅動電路設計
EC60C 的IECU 使用發光LED 作為監控和報警指示燈,包括安全帶指示燈、動臂偏置指示燈、推土板浮動指示燈等。本次設計選擇TI 公司的8 通道恒定電流吸入型LED 驅動器TLC5916。該芯片工作于3.3V 或5V 電壓,可同時驅動8 路LED,輸出恒定電流不隨負載電壓而改變。可以通過改變外部電阻來調整吸收5mA~120mA 的電流,實現LED 亮度靈活控制。其與MCU 采用SPI 接口相連,工作時鐘達30MHz。IECU 包括各種報警指示燈在內總共需要驅動15 路LED,因此將兩片TLC5916 級聯。
2.4 磁電存儲器
磁電存儲器采用ECERSPIN 公司的非易失性磁性隨機存儲器MR25H10,其具有1MB 的存儲容量。該MRAM 使用簡單的SPI 接口,工作時鐘高達40MHz。對于需要長期保存、快速讀取與恢復的重要數據,該MRAM 是理想的存儲器方案。MR25H10 可以用來保存挖掘機類型號、工作時間等重要的工況參數。
3 系統軟件設計
3.1 步進電機程序模塊設計
(1)步進電機指數形曲線加減速控制。常見的步進電機加減速控制曲線有三種: 梯形曲線、指數形曲線與S形曲線[5]。其中梯形曲線實現最簡單,但其加速、勻速與減速過程過渡不光滑,會影響電機的運行與使用壽命;S 形曲線的優點是加速度不會突變,提高了平穩性,缺點是實現比較復雜[6]。綜合考慮算法性能與系統需求,此處重點討論指數形曲線加減速控制。
指數形曲線是從步進電機矩頻特性推導而來,符合步進電機的固有規律。其運動方程式為:

減速運行階段:

其中: vm—步進電機的最高運行速度,τ1、τ2—決定步進電機升降速快慢的時間常數。
(2)指數形曲線的離散化處理。本設計中步進電機最高啟動頻率為120°/s,最高運行頻率為600°/s。根據實際情況留取一定裕量,取啟動頻率為100°/s,最高運行頻率為500°/s,代入式(1)、(2)與(3)中并加以修正得到其實際運動方程為:

為了能使用微控制器對步進電機速度進行控制,此處對指數形曲線的轉速按級差100°/s 分段離散化處理,如圖3 所示。
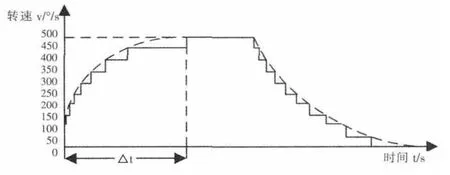
圖3 指數形加減速曲線的離散化Fig.3 Discretization of index-curve
設升速過程與降速過程時間相等,同為△t。為了保證總運行時間最短,應使加減速過程時間盡量短,勻速運行時間盡量長。實驗中,給定不同的值,分別計算出對應的加減速時間與運行總時間。進而計算出每個速度分段點的時間值與該速度級運行步數。在給定運行角度為100°時,計算結果如表2 所示。
從上表可以看出隨著加減速過程時間的減 小,總 運行時間也減小。當 減 小至5ms 時,步進電機出現了失步與啟動卡死的現象。實際上這時加減速階段的轉速加速度已經超過了步進電機允許的最大加速度。因此取最佳值,τ1=6.21,τ2=5.58,可保證步進電機在不失步的條件下總運行時間最短。各時間分段點對應的離散速度級的轉速和級步數(脈沖數)計算結果如表3 所示。

表2 τ值對應的△t與總時間(運行角度:100°)Tab.2 τ,△t and total time(angle:100°)中
(3)步進電機軟件模塊設計。步進電機軟件模塊主要分成兩部分: PIT 中斷處理和指數形調速曲線的軟件實現。周期中斷定時器PIT 可用來對輸入信號進行周期性的測量,同時設定指針的目標位置。PIT 中斷處理流程如圖4 所示。進入PIT 中斷后,首先對冷卻液溫度傳感器、燃油油位傳感器的電壓信號進行AD 采樣和濾波操作,并根據表盤量程與物理量范圍的對應關系計算目標位置。當輸入信號變化很快時,PIT 的采樣周期較短,可能會出現下次設定目標位置時電機還未轉到位的情況。若當前電機仍在轉動,就需要做進一步判斷。若目標位置θn小于當前位置θcur,則表示轉動方向與目標位置不一致,需要先減速到停止,再反向轉動[7]。θs是電機減速到停止過程中轉過的角度。根據不同的判斷結果計算位置增量并確定步進電機的轉動方向。當位置增量小于等于指數形曲線的加速與減速段的總運行角度θa-d時,調用勻速轉動子函數,否則調用指數形調速函數。

表3 離散速度級步數(△t=10ms)Tab.3 Discrete speed level steps(△t=10ms)

圖4 PIT 中斷處理流程Fig.4 The flow chart of PIT interruption processing

圖5 指數形加減速曲線的軟件流程Fig.5 The flow chart of indexcurve
指數形調速的軟件實現流程如圖5 所示。根據上一節的計算結果,將離散化后的各速度級轉速和對應的級步數(脈沖數)分別存入兩個數組中。輸入一個目標位置,先按照圖3 計算在勻速階段步進電機需要運行的步數和總的級步數,接著打開PWM 及其溢出中斷,啟動步進電機。之后步進電機每接收到一個PWM 脈沖就運行一個微步(1/12)°。當一個PWM 周期完成時就會觸發并進入溢出中斷,在中斷中當前速度級步數減1,總級步數減1。每到新的一級速度,需更新PWM 頻率。直到總級步數減為0,電機運行到了指定位置,這就完成了一次指數形加減速的過程。
3.2 IECU 模式菜單設計
根據IECU 的功能需求設計了三種模式: 運行模式、設定模式和服務模式,并以菜單結構組織。操作者可以通過鍵盤上的上下方向鍵、SELECT 鍵與ESC 鍵在不同的功能界面間切換。
(1)運行模式。運行模式中的核心界面是轉速/時間界面,該界面顯示了當前時間和發動機轉速。此外運行模式還包括X1 流量控制等功能。按下SELECT 鍵5s,可切換至服務模式菜單界面,進入服務模式;若按下時間不足5s,則切換至設定模式菜單界面,進入設定模式。
(2)設定模式。在設定模式中可以重新設定當前系統時間。按ESC 鍵可以返回至轉速/時間界面。
(3)服務模式。進入服務模式后,可以通過服務模式菜單界面選擇相應選項,包括車輛、發動機、液壓和電氣系統的相關信息。車輛信息界面中可以重置并設定工作時間,查看當前挖掘機型號,選擇防盜、自動怠速、推土板浮動等功能;發動機界面中可以查看冷卻液溫度、燃油油位和發動機轉速的具體值;液壓界面中可查看液壓系統運行狀態;電氣系統界面中不僅可查看電池電壓,也能對輸入輸出值,如PWM、開關量等進行檢查。
4 結論
實際測試結果表明,采用上述的指數形算法可以保證燃油油位表、冷卻液溫度表指針快速、平穩、準確地轉動到指定位置。設計的運行模式、設定模式和服務模式之間可靈活切換,方便駕駛員對挖掘機運行參數實時監控、記錄與設定。該IECU 界面簡潔美觀,操作方便,具有良好的工程應用價值。
[1] 魏斌,劉會娟.小型液壓挖掘機電控系統的現狀與發展[J]. 建筑機械化,2012,9.
[2] 胡凱利. 某中型液壓挖掘機電控系統的設計與實現[D]. 南京理工大學,2010.
[3] 王宜懷,吳瑾,蔣銀珍. 嵌入式系統原理與實踐:ARM Cortex-M4 Kinetis 微控制器[M]. 北京:電子工業出版社,2012.
[4] 廖建斌. 步進電機式汽車儀表控制技術[J]. 汽車電器,2008,6.
[5] 曹東杰,韓峰,任云燕. 單片機控制步進電機按S 形曲線升降頻設計[J]. 彈箭與制導學報,2006,2.
[6] 李曉菲,胡泓,王煒. 步進電機加減速控制規律[J].機電產品開發與創新,2006,19.
[7] 傅志強. 在HCS08 系列MCU 上用軟件實現儀表步進電機的驅動[J].電子產品世界,2010,5.
猜你喜歡
當代陜西(2020年13期)2020-08-24 08:22:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
制造技術與機床(2017年5期)2018-01-19 02:49:17
海峽姐妹(2017年7期)2017-07-31 19:08:17
金秋(2017年4期)2017-06-07 08:22:16
Coco薇(2017年5期)2017-06-05 08:53:16
中國材料進展(2016年10期)2016-12-26 06:50:20
濰坊學院學報(2016年2期)2016-12-01 13:00:11
