電力拖動控制系統課程教學改革與實踐
2014-02-08 09:08:32張敬南
實驗室研究與探索 2014年9期
張敬南, 彭 輝
(哈爾濱工程大學 自動化學院,黑龍江 哈爾濱 150001)
0 引 言
作為電氣工程及其自動化專業、自動化專業的主干課程,電力拖動控制系統課程結合了電機學、電力電子技術、自動控制原理等基礎課程的綜合應用,是一門實踐性和綜合性很強的課程[1-2]。通過該課程的學習要使學生掌握典型交、直流調速系統的構成原理和計算方法,具備進行系統設計和分析的能力[3-4]。為了更好地提升學生的學習興趣、鍛煉學生的實踐能力、培養學生的研究能力,在理論教學過程中引入了包括仿真在內的各種多媒體輔助教學手段,并基于項目任務法開展了教學活動;實驗教學過程中采用了虛擬實驗教學軟件輔助教學,并在必做實驗基礎上根據學生掌握程度增設不同的創新實驗和具有專業特色的實驗。課程組結合教學實踐對相應的改革工作進行了檢驗。
1 課程特點分析
我校電氣工程及其自動化一級學科下包括了電力系統及其自動化和電力電子與電力傳動兩個專業方向,專業培養學生重視電氣設備應用、系統設計,而非電氣元件的設計與工藝。對于研究型大學專業人才培養的特點,培養方案重點在于培養學生的具有解決電氣工程領域分析與控制技術問題的基本能力。因此,電力拖動控制系統成為學生在本科階段最為重要的專業主干課程。
根據我校本科人才培養方案的培養目標,電力拖動控制系統課程需要學生掌握的關鍵知識點主要包括:熟悉典型的電力拖動控制系統的拓撲結構,并能夠進行元器件選擇設計;能夠基于工程設計法進行電力拖動控制系統的調節器參數設計;既能夠實現電力拖動控制系統的模擬控制,又能夠實現數字控制;能夠對典型故障進行判斷分析;能夠對調節器參數變化的影響做分析。
對于學生而言,令學生感覺學習困難和不適應的地方在于電力拖動控制系統課程不同于學生在之前學習的課程。電力拖動控制系統是屬于系統級研究的課程,學習過程需要由多門專業基礎課程支撐,知識面寬、專業基礎要求高、綜合性和實用性強。為了提高學生的實踐能力,項目教學法、逆序教學法被應用到國內的職業教育中,并取得了較好的實踐效果。我校本課程的改革可以借鑒其他院校的研究成果,但與職業教育不同,培養的學生實踐能力的同時,還要強調基礎和培養學生對電力拖動系統分析研究的能力。
綜上分析,對于這樣一門理論性和實踐性均很強的課程,采用單純的理論講授或者純粹的項目教學法均存在問題。總結來看,應該注意到以下幾個問題。
(1) 課程為多門專業基礎課的綜合應用,要避免教學過程中對基礎課程內容的過多復習,要努力提升學生的學習興趣,令學生在課后主動去鞏固基礎知識。
(2) 理論講授過程中要避免單純的理論分析,加強理論結合實踐、應用于實踐的力度。
(3) 實驗環節中要避免學生對系統實驗認識不足的情況下進行實驗,要提高實驗學時限制下的實驗效率和實驗效果。
(4) 培養學生的分析能力,掌握一定的分析方法。不僅是正常運行狀態的分析,還包括各種因素變化對電力拖動控制系統影響,以及在真實的實驗環境下難以實現各種錯誤設計、故障情況對電力拖動控制系統影響。
2 課程改革方案探討
2.1 理論教學過程改革
2.1.1多媒體與仿真技術輔助課程講授
最基本的多媒體技術應用是直觀的圖片與視頻。通過結合工程應用和科研實踐的大量實例圖片和視頻,不僅在理論講授過程中提升學生的感性認識,而且使理論應用有的放矢[5-6]。比如說,結合水池實驗室電力拖動控制系統講授電力拖動系統構成[7];結合長江升船機講授電力拖動控制系統講授多機同步控制;結合西門子公司6RA70的直流調速系統的設計與調試視頻講授雙閉環調節器參數變化影響。
由于仿真技術投資少、安全性高、可以設計極端條件的運行狀況,為電力拖動控制系統的教學提供了有力的支持[8-9]。教學過程中依托針對各個典型電力拖動控制系統的仿真程序,既可以加深學生對系統構成的認識,又可以為運行過程分析、參數研究等教學內容提供直觀的分析工具[10]。學生也可以在課后結合仿真程序開展各種運行狀態或故障狀態的仿真分析研究。
建構主義理論認為教學是激發學生建構知識的過程[11]。既然知識是學習者自我建構的結果,那么教學就不是傳授、灌輸知識的活動,而是一個激發學生建構知識的過程。課程中利用虛擬仿真技術為學生提供了電力拖動控制系統仿真運行的各種案例,學生通過對仿真程序的應用,以及對仿真結果的比較分析,總結經驗,實現自我學習認知的過程。通過教學實踐,基于建構主義理論構建了一套循序漸進的仿真教學體系,形成了理論教學—仿真案例分析—仿真結果總結—新的仿真案例分析—深入理論總結的學習過程。
2.1.2項目教學法應用教學改革
項目教學法在計算機類、電子類課程中有所應用,對于提升學生自由探究和互動式學習有很好的實踐效果[12-13]。項目教學法的應用是在理論學習之后,根據教師布置的項目任務,在教師的監督下完成的。項目教學法可以使學生完整的經歷一個項目任務的資料收集整理分析、方案設計論證、計劃實施與實現、成果總結匯報、答辯與點評等過程。學生可以在以下幾個方面獲益:① 通過初期調研和方案的制定,能夠增強學生對理論知識的掌握水平,清晰相關知識的發展現狀和運用情況;② 通過將理論與實踐項目結合能夠激發學生的學習興趣,并鍛煉了學生實際運用能力,使所學有所用,理論得以升華;③ 通過項目目標逐步實現的過程,既培養了學生面對困難時需要的科研攻關素質,又建立了目標實現后的成就感和自信心;④ 通過團隊的合作過程,鍛煉學生的團隊合作能力和團隊榮譽感。
考慮到課程的工作量和學生能力等因素。采用項目教學法應該注意數量、難度、相互銜接等方面問題。
(1) 雖然本課程教學內容和知識點很多,但是不能大量采用項目教學法,否則增加了學生課后負擔,令學生疲于應對,導致學生無法深入探索,并可能打擊了學生的興趣。所以本課程只針對課程中幾個關鍵知識點設置項目任務,并采用分組合作的形式來完成學習過程。
(2) 要根據每屆學生對基礎課程掌握程度的不同設置難度適宜的項目任務。雖然本課程教授內容需要緊密聯系工程實踐,但是考慮到學生的實際情況,不可能要求學生做到面面俱到,主要是要突出研究重點,簡化研究難度,避免出現粗枝大葉、舍本逐末等現象。
(3) 項目任務要體現循序漸進過程,從簡單到復雜、從子系統到全系統、從基本理論到派生理論過程。
綜上考慮,本課程中采用了項目教學法的關鍵內容和具體要求如下所述。
(1)電力拖動控制系統靜態設計項目。根據靜態指標要求,進行控制系統構成方案的設計。有助于學生掌握系統的構成和主電路元器件選擇方法。
(2)不可逆直流電力拖動系統仿真程序設計。結合仿真軟件構建系統的仿真程序。有助于學生熟悉主要元器件的數學模型;具備進行系統靜動態分析的能力;掌握采用不同的PI調節器參數對控制系統的影響。
(3)調節器參數設計項目。在(1)和(2)的基礎上,結合動態指標要求,進行系統的動態設計。有助于學生對調節器參數的設計方法深入掌握,包括自動控制原理講授的基于Bode圖的動態校正方法和本課程講授的工程設計法;
(4)數字控制設計項目。結合(3)的設計結果,編制數字濾波和增量式調節器的程序。有助于學生掌握數字濾波器和數字調節器的設計與實現過程;
(5)邏輯控制無環流可逆調速系統設計項目。在不可逆雙閉環調速系統設計的基礎上進行可逆系統的設計。有助于學生掌握邏輯無環流可逆系統的構成,以及無環流邏輯控制器的實現。
(6)異步電動機矢量控制系統設計項目。基于(1)~(5)對雙閉環直流調速系統的控制結構和調節器的設計思想的掌握,完成異步電動機矢量控制系統設計。有助于學生加深對雙閉環控制系統的認識,并進一步推廣到其他控制場合。
2.2 實驗教學改革
2.2.1結合虛擬實驗軟件的實驗教學改革
依托GUI編程技術和動畫制作進行虛擬實驗模擬,核心是對實驗中的各種元件、負載及控制回路編制數值計算的程序,并通過多媒體技術和人機接口技術設計虛擬實驗操控界面[14-15]。虛擬實驗操作由數學模型驅動,并用數值仿真技術計算系統的工作過程。基于建構主義學習理論設計功能元素和表現形式,綜合利用多種知識傳輸媒介和多媒體表現形式提高學生的學習效果。
虛擬實驗軟件的應用為學生提供了實驗預習工具,加深了對實驗的認識,提高了實驗室實驗的效率和效果。同時,也使學生脫離了實驗室實驗地域和時間的限制。
2.2.2深化實驗內容
隨著科學理論和新型設備的發展,電力拖動控制系統也出現新的形式和新的應用。實驗室通過自研設備和引進實驗設備,在必做的基礎實驗基礎上開設了部分自選實驗內容,包括理論深入的異步電動機矢量控制實驗和直接轉矩控制實驗;實用控制設備應用的基于西門子控制器和基于歐陸控制器的電力拖動控制系統實驗等。
結合我校具有的船舶特色,增設了船舶電力推進系統創新實驗。將基于科研研究構建的船舶電力推進全數字仿真教學平臺和半物理虛擬實驗平臺應用于本科教學,解決了遠離船舶運行環境進行船舶電力推進內容教學的問題。船舶電力推進系統數學模型研究構建全數字仿真模型作為仿真教學平臺的后臺分析計算程序,結合多媒體技術和GUI接口技術構建船舶推進系統操作平臺用于仿真操作。半物理虛擬實驗平臺結合了科研成果,其核心是計算機的船舶推進系統數值仿真程序和半物理實驗裝置的有源逆變控制技術。
教師可以根據學生的學習情況以及學生的興趣愛好選擇性的完成上述各類實驗。
3 課程改革實踐檢驗情況
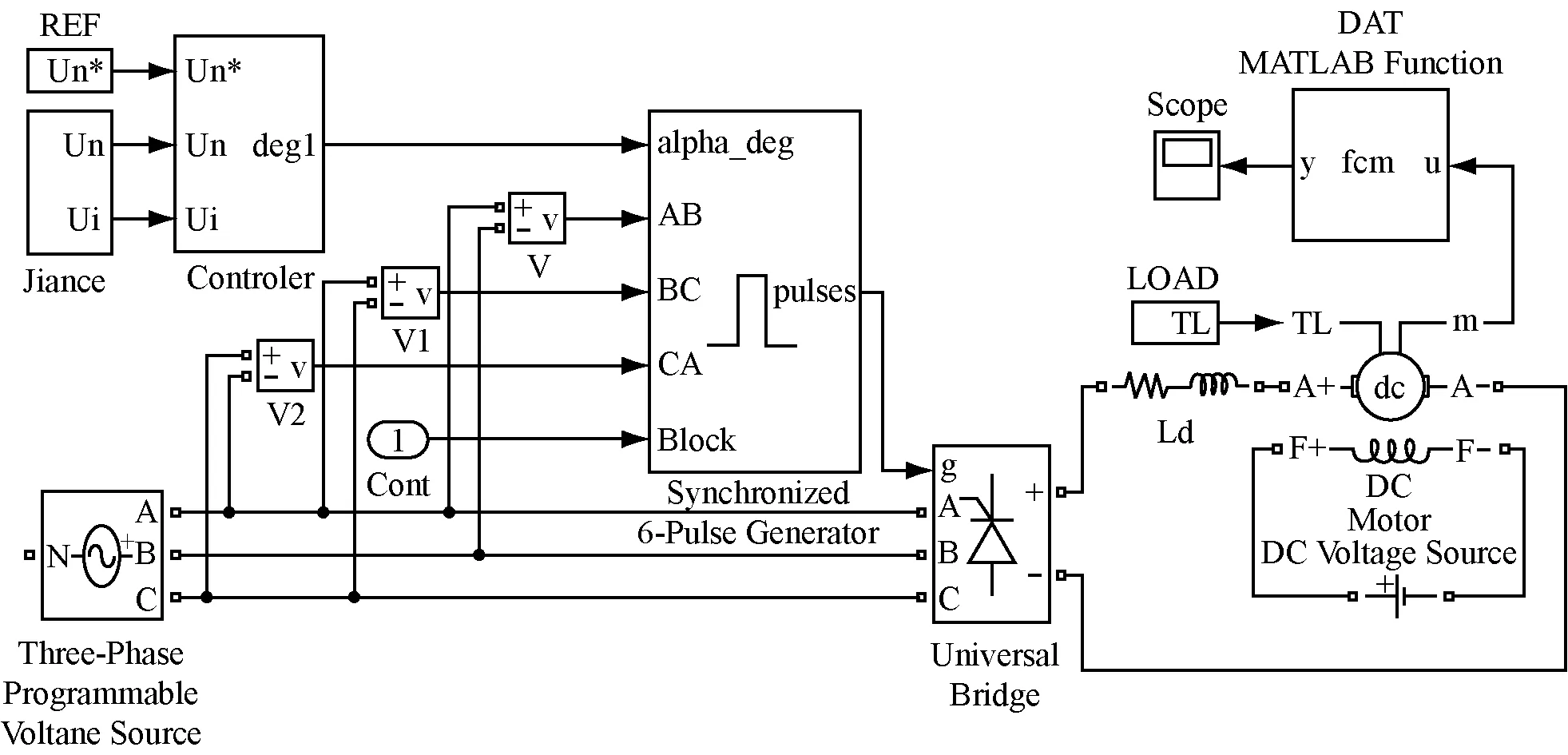
結合我校電氣工程及其自動化專業“電力拖動控制系統”課程的教學活動,本文所述各項教學改革工作得到了很好的實踐。基于仿真技術進行輔助教學早在2008年我校電氣工程及其自動化專業“電力拖動控制系統”課程的教學中就開始了實踐,近年來不斷改進完善,已經應用到課程各個主要環節的教學過程中,獲得了學生的歡迎與好評。圖1所示為課程中采用的基于Simulink仿真軟件的直流電力拖動控制系統仿真程序。
基于項目教學法的教學改革在2013年通過學校教學立項并在10級電氣工程及其自動化專業“電力拖動控制系統”課程中進行了實踐,按照2.1.2的設計很好的完成了教學任務,學生頗為獲益,反饋效果很好。
2012年開始開發了基于Visual C++和Simulink接口技術的虛擬實驗軟件,并將其逐步應用于09級和10級電氣工程及其自動化專業“電力拖動控制系統”實驗教學中,為實驗教學提供了良好的支撐。圖2所示為虛擬仿真實驗操作界面。
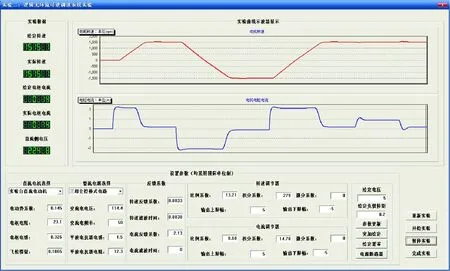
圖2 虛擬仿真實驗操作界面
所設置的選作實驗中,西門子控制器這些現實生產活動中的主流產品的實際應用內容極大地吸引了學生興趣;具有學校特色的船舶電力推進仿真實驗內容加深了學生對專業和學校的認識,吸引了一批保研學生加入課題組繼續深造。
4 結 語
針對理論性和實踐性均較強的“電力拖動控制系統”課程而進行的一系列教學改革在實踐中取得了很好的效果。通過改革,不僅使教學過程變得豐富多彩,吸引了學生的注意,激發了學生的學習熱情;而且是學生掌握基本知識之外,是學生掌握了更多的設計方法和分析手段,并培養了學生的創新意識和研究能力。在“電力拖動控制系統”課程改革的經驗,將被借鑒到我校其他課程的教學改革中。
[1] 李 萍,厲 虹,侯懷昌. 電氣工程及其自動化專業運動控制系統課程實驗教學改革探討[J]. 教育理論與實踐,2010, 30(5):61-63.
Li Ping, Li Hong, Hou Huai-chang. A probe into the reform of experimental teaching of motion control system course in electrical engineering & automation specialty[J]. Theory and Practice of Education, 2010, 30(5): 61-63.
[2] 徐培鳳,施 凱. “運動控制技術”課程教學方法改革與探討[J]. 中國電力教育,2013(8):71-72.
Xu Pei-feng, Shi Kai. The reform and study of teaching of motion control technology course[J]. China Electric Power Education, 2013(8):71-72.
[3] 阮 毅,陳伯時. 電力拖動自動控制系統——運動控制系統[M]. 北京:機械工業出版社,2011.
[4] 洪乃剛. 電力電子、電機控制系統的建模和仿真[M]. 北京:機械工業出版社,2011.
[5] 唐 慧,張多來,凌均衛. 高校多媒體教學存在的問題及對策——以南華大學為例[J]. 高教論壇,2012(1):77-81,85.
Tang Hui, Zhang Duo-lai, Ling Jun-wei. Research on problems and strategies of multimedia teaching in universities——taking university of south china for example[J]. Higher Education Forum, 2012(1): 77-81, 85.
[6] 雷體南. 課堂多媒體教學模式與教學過程設計的探討[J]. 中國教育技術裝備,2009(12):1-3.
Lei Ti-nan. Exploring of multimedia teaching mode and process of teaching design[J]. China Educational Technique & Equipment, 2009(12): 1-3.
[7] 劉 航,朱建華. 全數字直流調速裝置在船模試驗拖車控制系統中的應用[J]. 實驗技術與管理,2002,19(6):24-27.
Liu Hang, Zhu Jian-hua. Application of full digital DC speed regulating device in the ship model test trailer control system[J]. Experimental Technology and Management, 2002, 19(6): 24-27.
[8] 洪乃剛,汪小平,黃松清. 電力電子和電力拖動控制系統虛擬實驗的開發和應用[J]. 實驗室研究與探索,2005, 24(5):338-339.
HONG Nai-gang, WANG Xiao-ping, HUANG Song-qing. The applications of invented experiments on the teaching of power electronics and electric drives[J]. Research and Exploration in Laboratory, 2005, 24(5): 338-339.
[9] 陳麗蘭. “電力拖動系統”課程實踐教學的探索[J]. 實驗室研究與探索,2011, 30(11):389-391.
Chen Li-lan. Practice teaching in motion control system[J]. Research and Exploration in Laboratory, 2011, 30(11): 389-391.
[10] 張敬南. “電力拖動自動控制系統”中的仿真教學研究[J]. 電氣電子教學學報,2010,32(4):110-112.
Zhang Jing-nan. Simulation Teaching of Electric Drive Automatic Control System[J]. Journal of Electrical & Electronic Education, 2010, 32(4): 110-112.
[11] 楊維東,賈 楠. 建構主義學習理論述評[J].理論導刊,2011(5):77-80.
Yang Wei-dong, Jia Nan. Review on the theory of constructivism learning[J]. Journal of Socialist Theory Guide, 2011(5): 77-80.
[12] 張蘭芳. 基于“項目教學法”的計算機基礎教學及其評價[J]. 西南師范大學學報(自然科學版),2012,37(6):245-248.
Zhang Lan-fang. Basic teaching of computer and the evaluation based on the project based learning[J]. Journal of Southwest China Normal University(Natural Science Edition), 2012,37(6): 245-248.
[13] 刁元妹.項目教學法在《電子技術》課程中的應用[J].電子技術,2009(6):3-4.
Diao Yuan-mei. The application of item teaching method in electronic technology course[J]. Electronic Technology, 2009(6): 3-4.
[14] 木合亞提.伊克山. “電力拖動自動控制系統”課程實驗的改革[J]. 實驗室研究與探索,2010,29(12):131-133.
Muheyati Yikeshan. Reform and practice on electric drive experiment[J]. Research and Exploration in Laboratory, 2010,29(12):131-133.
[15] 董建婷,王 杰.VC++調用Matlab實現圖像處理的3種常用方法比較[J]. 現代電子技術,2012, 35(16):46-49.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
內蒙古教育(2021年20期)2021-03-08 01:09:14
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52