基于蟻群算法的增程式電動中巴車控制策略優化
2014-03-13 11:40:42王新樹
北京汽車 2014年3期
馬 堯,張 偉,王新樹
(合肥工業大學 機械與汽車工程學院,安徽 合肥 230009)
在傳統汽車帶來的能源危機和環境污染問題越來越嚴重的背景下,新能源汽車得到了世界各國越來越廣泛的重視。但純電動汽車卻存在續駛里程短、成本高等缺點,影響了其產業化進程[1]。
增程式電動車安裝有可增加續駛里程的增程單元(包括發動機和ISG電機),可在電池虧電時與動力電池組一起為車輛提供動力。增程式電動車在很大程度上彌補了純電動汽車的不足,同時也具備電動車輛的各種優點,具有很好的產業化前景。在確定好整車各部件參數后,增程式電動車控制策略的優劣成為影響整車燃油經濟性的一個重要因素,因此有必要對控制策略的關鍵參數進行優化,以改善整車的燃油經濟性。
蟻群算法是一種仿生類優化算法,是由意大利學者M.Dorigo等人首先提出來的[2]。通過模擬蟻群在覓食過程中發現覓食最佳路徑的搜索機制的一種優化算法。蟻群算法具有很好的魯棒性,同時易獲得全局最優解。因此文中使用蟻群算法對某增程式電動中巴車控制策略的關鍵參數進行優化,以期改善車輛的燃油經濟性。
1 優化目標和約束條件
增程控制策略中目前應用較多的有恒溫器控制和功率跟隨控制策略。恒溫器控制因發動機工作點是固定的,可以一直工作在較經濟的點,其燃油經濟性相比較而言較好,因此文中選用恒溫器控制策略來控制增程單元[3-4]。
1.1 優化變量和優化目標
恒溫器控制中,當 SOC降低到一個較低值SOCmin時,就會啟動發動機和增程發電機,為整車提供動力。然而增程器工作時能量傳遞的環節較多,且發動機效率一般較低,其工作效率一般低于直接使用電池中的電能,因此增程單元工作一段時間后,電池電量若回升到一個較高值SOCmax,控制器就會關停增程發動機。SOCmin和SOCmax的參數選擇是否合適對整車的燃油經濟性影響較大,因此將這兩個參數作為優化變量。
優化是為了減少車輛的油耗,提高燃油經濟性,而在不同的工況下,車輛的經濟性能差別很大。文中采用連續的10個NEDC循環作為衡量車輛經濟性的仿真工況,并以此為優化目標。
1.2 約束條件
本次優化的約束主要是來自設計目標對整車動力性能的要求,即
式中,Pspeed(v)為保證車輛最高車速要求所需的功率;Pi(v)為保證車輛爬坡度要求所需的功率;Pacc(v)為保證車輛加速性能要求所需的功率;η為傳動系統效率;Pemax為增程單元的最大功率;Pbmax為電池能提供的最大功率。
2 蟻群算法
基本蟻群算法一般包括兩個階段,即適應階段和協作階段。適應階段時,通過不斷積累信息,算法會對各候選解進行結構調整,此時,各路徑上,若經過的螞蟻越多,信息量就越大,這條路徑就越容易被算法選擇;在協作階段,各候選解之間則會通過信息交流以產生更優的解。實際上,蟻群算法是一種智能多主體系統,得利于其自組織機制,其不需要對問題的各個方面都有詳盡的了解,這使其能具有較廣的應用范圍。其邏輯結構如圖所示[5]。
為了便于應用蟻群算法對增程控制策略進行優化,在基本算法的基礎上,參考相關文獻,總結出如下流程的優化算法。
設優化變量需要精確到 d,則將其分為 d+2層,分層進行優化。每完成一層的尋優后,螞蟻向下一層前進,并且螞蟻只能向較高的層前進,不能返回較低的層,用k來表示層數。
首先需要初始化各路徑的信息素,并將所有螞蟻的第一步都置為0。然后對螞蟻的前進路徑進行選擇,節點i的第n只螞蟻下一跳的目標節點j的選擇規則為
式中,q是隨機數;Q0是一個[0,1]上的常數;為殘留信息量;Sr表示需要按照式(3)來計算使用輪盤選擇法選擇去下一層中的城市所需的概率[6]。
式中,P(i,j)表示螞蟻從節點 i轉移到節點j的概率。
螞蟻在路徑上經過后都需要對路徑上的殘留信息按式(4)進行局部更新。
式中,ρ 為(0,1)上一常數;τ0為一較小的值,用于初始化。
當各只螞蟻都按上述步驟完成循環后,就需要對路徑上的信息進行全局更新。首先計算出各只螞蟻對應的能量消耗量B(x)后,選擇出能量消耗最少的螞蟻 nmin,并對這只螞蟻的路徑按式(5)進行全局更新[6]。
式中,a為nmin在第k-1層的節點;b為nmin在第k層的節點;α 為(0,1)上的常數。
3 仿真模型建立
優化對象為某增程式電動中巴車,其整車主要參數如表1所示。
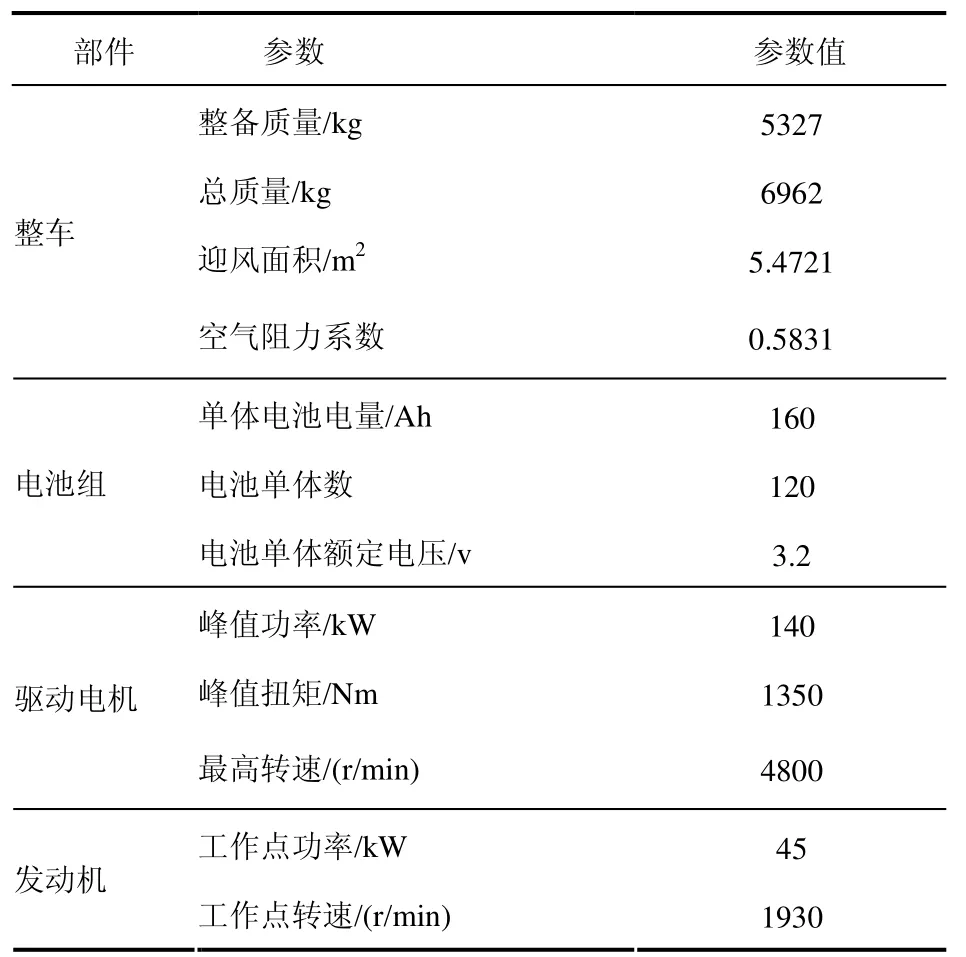
表1 整車主要參數
其它相關參數,如驅動電機的效率曲線、發動機萬有特性曲線以及增程發電機參數等不在此列出。
為了方便仿真計算,利用上述參數在車輛動力性和經濟性計算軟件CRUISE中建立整車模型,如圖2所示。
4 仿真結果分析
根據上文提到的蟻群算法流程,在 Matlab/Simulink中編寫M文件,并設置算法參數:螞蟻只數設為30只;Q0設為0.8;ρ設為0.8;τ0設為0.01;α 設為0.8。
按照設計經驗將SOCmin的初始值設為30%,SOCmax的初始值設置為50%,在此初始值基礎上對優化變量進行優化,并得到優化值為SOCmin=35.5802%,SOCmax=51.7191%。
為了驗證優化的效果,分別在 CRUISE模型中對優化前和優化后進行仿真計算,仿真工況由連續10個NEDC工況組成,電池電量初始值設置為50%,仿真結果如圖3所示。
為了方便對比,利用式(6)將消耗的電能利用價格折算成油耗,同時為了更好地對比優化前、后控制策略參數的變化對燃油經濟性的影響,對關鍵結果進行整理,如表2所示。
式中,Bw為總的能量消耗,L;SOC為仿真結束時電池SOC值,%;W為電池總電量,kW·h;Ve為當前電價;Vf為當前油價。
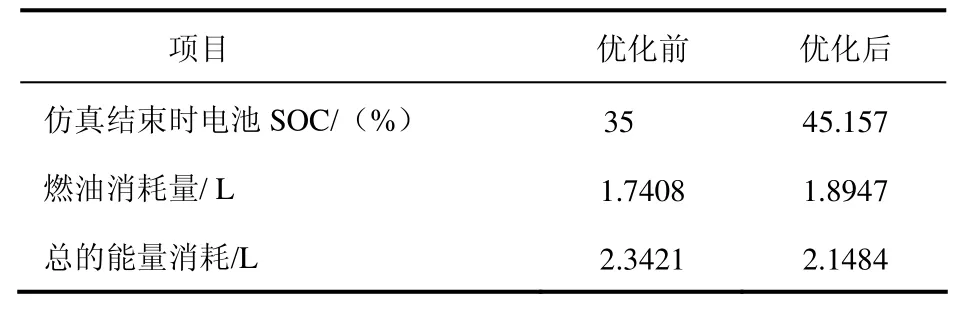
表2 優化前、后對比
由表中結果可以看出,優化前、后總的能量消耗降低了8.27%,優化效果顯著。
5 總 結
利用蟻群算法對某增程式電動中巴車控制策略的關鍵參數進行優化,并利用 CRUISE軟件對優化前、后進行對比仿真,仿真結果表明,經過優化,車輛的經濟性能得到了明顯的提高。
[1]徐群群,宋珂,洪先建,等. 基于自適應遺傳算法的增程式電動汽車能量管理策略優化[J]. 汽車技術,2012(10):19-23.
[2]Colorni A,Dorigo M and Maniezzo V. Distributed optimization by antcolonies [A]. In:Proc. of 1st European Conf. Artificial Life [C]. Pans,France:Elsevier,1991,134-142.
[3]葉冬金. 增程式純電動車動力系統參數匹配及控制策略研究[D]. 長春:吉林大學,2012.
[4]呼和. 增程式純電動車動力系統參數匹配與優化研究[D]. 長春:吉林大學,2012.
[5]段海濱. 蟻群算法原理及其應用[M]. 北京:科學出版社,2005.
[6]陳燁. 用于連續函數優化的蟻群算法[J]. 四川大學學報(工程科學版),2004,36(6):117-120.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
