DCT換擋液壓系統主油壓閥的模糊PID控制
2014-03-13 11:40:46孔慧芳張恩源
北京汽車 2014年3期
孔慧芳,張恩源,鮑 偉
(合肥工業大學 電氣與自動化工程學院,安徽 合肥 230009)
0 引 言
雙離合器式自動變速器(DCT)綜合了電控機械式自動變速器(AMT)和液力機械式自動變速器(AT)的優點,是一種新型的自動變速器[1-2]。DCT采用液壓閥做執行機構,DCT液壓系統能否按照既定的要求正常可靠地運行,在很大程度上取決于液壓閥的性能優劣[3-4],因此對液壓系統中的電磁閥進行有效控制就顯得尤為重要。
文中以裝載了濕式雙離合器式自動變速系統的主油壓閥為研究對象,分析了液壓換擋系統主油壓閥的工作原理,建立了主油壓閥的數學模型。因為電磁閥具有非線性、參數時變、數學模型無法精準獲得等特點,故采用模糊 PID控制器控制換擋壓力,提高抗干擾能力,并進行了仿真驗證。
1 DCT換擋液壓控制系統主油壓閥的數學建模
1.1 DCT換擋液壓系統主油壓閥的工作原理
液壓換擋系統的主油壓電磁閥為直動式電液比例減壓閥,根據直動式電液比例閥的工作原理,可以得到其傳遞函數。圖 1為直動式電液比例減壓閥的原理圖,其中比例電磁鐵提供指令力信號,減壓閥處于常開狀態,閥芯右端面直接驅動閥芯。
直動式電液比例閥的閥芯受力方程為[7]
式中,M 為閥芯質量,kg;Bv為閥芯粘性阻尼系數,N·s/m;Bt為瞬態液動力阻尼系數,N·s/m;Ks為液動力彈簧剛度,N/m;A為出口壓力反饋作用面積,m2。
當給比例電磁鐵通電后,閥芯向右移動,這時閥口打開到最大開口位置,隨著負載的增加,減壓閥出口壓力隨著增加,出口壓力通過反饋通道作用在閥芯右端,與輸入的電磁力比較,當比例減壓閥電磁力所對應的輸出壓力高于其負載決定的壓力時,減壓閥口的開度不變化,減壓閥不起減壓作用。當比例減壓閥的電磁力所對應的輸出壓力等于其出口負載決定的壓力時,減壓閥開始起減壓作用,閥口開度減小,減壓縫隙的變化對應一定的壓差,出口壓力基本上不隨進口壓力的變化而變化。這樣保證了出口壓力保持不變,并且與輸入電流成正比,如果出口壓力對閥芯的作用力大于電磁力,閥芯左移,A口與T口相通,使A口壓力下降,直到閥芯處于新的平衡位置。
1.2 DCT換擋液壓系統主油壓閥的數學建模
比例電磁鐵輸出力方程
式中,K2為比例電磁鐵的電流-力增益系數,N/A。
減壓閥出口流量-壓力方程
在負載流量為零時,流量連續方程為
對上述公式進行拉式變換可得
式中各參數值如表1所示。
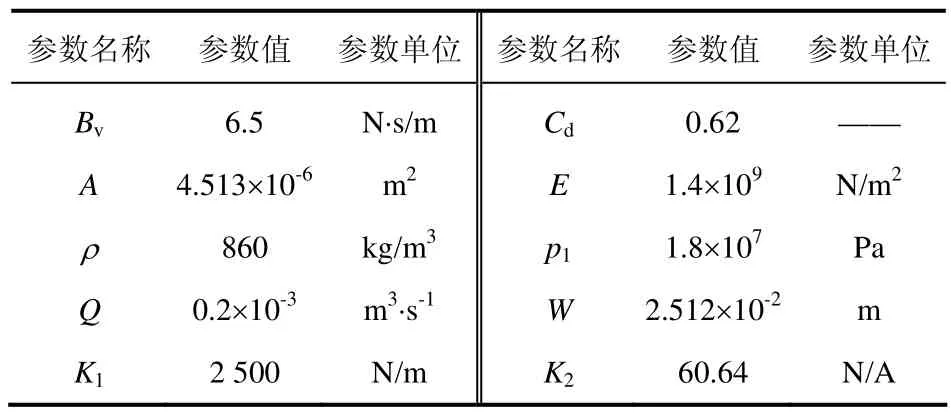
表1 主油壓閥仿真參數表
2 模糊PID控制器的設計
將模糊控制與傳統PID控制相結合,可以提高被控對象的適應能力,即魯棒性較好。常用的方法有2種:一種是將模糊控制與傳統PID控制相結合的雙模控制或復合控制;另一種是通過模糊推理自適應整定,調整PID參數[7]。文中采用第1種方法。
根據直動式電液比例減壓閥傳遞函數設計的基于模糊PID雙模控制算法的控制模型如圖2所示,用來控制油壓,使油壓的變化滿足需要。圖中r為輸入量,e為輸入和輸出的誤差量,y為輸出量。
模糊-PID復合控制的策略是:在誤差或者誤差變化較大時采用模糊控制,在誤差小時轉化為PID控制。或者說由模糊控制負責粗調、由 PID負責細調。二者的轉換根據設定的誤差閥值由計算機軟件自動實現。誤差閥值的計算公式為
其中,emax為誤差最大值,n為量化級數[8]。
文中設計的控制器中,量化級數n=7,根據計算公式,誤差最大值emax為3,所以設置為 0.2。
電磁閥通過控制輸入電流來控制輸出壓力。設計模糊控制器時以電磁閥輸出壓力的誤差 e和輸出壓力的誤差變化率Δe作為模糊控制器的輸入,模糊控制器的輸出為電流增量Δi。
1)輸入量的模糊化。將壓力誤差的模糊語言定為:{負大(NB)、負中(NM)、負小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)},設定基本論域為:{-2,-1,0,1,2};輸出壓力的變化率的模糊語言定義為:{負大(NB)、負小(NS)、零(Z)、正小(PS)、正大(PB)},設定基本論域為:{-5,-4,-3,-2,-1,0,1,2,3,4,5};
2)輸出量的模糊化。將輸出離合器壓力增量Δi 的模糊語言定義為:{負大(NB)、負中(NM)、負小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)},設定基本論域為:{-5,-4,-3,-2,-1,0,1,2,3,4,5}。
3)模糊控制規則的確定。模糊控制規則實質上是將操作員的控制經驗加以總結,從而得出一條條模糊條件語句的集合。確定模糊控制規則的原則是必須保證控制器的輸出能夠使系統輸出響應的動態性能達到最佳,如圖3所示。
4)清晰化。采用最大隸屬度法。若輸出量模糊集合C′的隸屬度函數只有一個峰值,則取隸屬度函數的最大值為清晰值,即
其中,z0為清晰值。若輸出量的隸屬度函數有多個極值,則取這些極值的平均值為清晰值。
利用上述設計的模糊控制器可以建立比例電液閥的模糊PID控制系統仿真模型,如圖4所示。其中P=0.8,I=0.6,D=0.1。
3 仿真結果與分析
由于電磁閥在工作時不是理想的狀態,可能會出現勞損、磨損或者卡滯等現象,造成閥口面積梯度變化或者閥口流量系數變化等。這時,主油壓閥的傳遞函數將發生變化,傳統的PID控制器由于參數并不變化,可能無法保證控制的效果。
取閥口面積梯度為2.512×10-2,閥口流量系數為0.62時,仿真結果如圖5(a)所示;取閥口面積梯度為2.0×10-2,閥口流量系數為0.5時,仿真結果如圖5b所示。
仿真結果可見,模糊PID與常規PID的控制方式相比具有超調量小和調節時間短的優勢。這是因為模糊PID控制規則是通過專家經驗設計的模糊規則,當被控對象發生變化時,模糊控制器仍然可以進行有效控制,經過實際調試后其魯棒性很容易達到要求。
4 結 論
在分析雙離合式自動變速器液壓換擋系統主油壓閥的工作原理的基礎上,建立了主油壓閥的數學模型。通過理論分析,依據主油壓閥的數學模型設計了模糊PID控制器。仿真結果表明該控制器在電磁閥的某些參數改變,并導致其傳遞函數變化的情況下,仍然能保證良好的控制效果,即在模糊PID控制算法下能夠滿足系統的魯棒性要求。
[1]楊偉斌,吳光強,秦大同.雙離合器式自動變速器傳動系統的建模及換擋特性[J]. 機械工程學報,2007,43(7):13-21.
[2]牛銘奎,程秀生,高炳釗,等.雙離合器式自動變速器換擋特性研究[J].汽車工程,2004,26(4):453-457.
[3]毛衛平. 液壓閥[M]. 北京:化學工業出版社,2009.
[4]賈銘新,胡曉東.液壓傳動與控制[M]. 北京:國防工業出版社,2010:106-109.
[5]王春行. 液壓控制系統[M]. 北京:機械工業出版社,2011:32-33.
[6]姚佳.電液比例減壓閥頻響特性仿真與試驗研究[D].湘潭:湖南科技大學,2009.
[7]羅兵,甘俊英,張建民.智能控制技術[M]. 北京:清華大學出版社,2011:62-63.
[8]王華強,袁浩,楊滁光.自適應模糊神經網絡在EPS中的應用[J].合肥工業大學學報:自然科學版,2011,34(2):188-191
