通道相位不平衡對火控雷達測角影響分析
2014-03-13 17:38:40王李民鄭啟寧楊俊東
雷達科學與技術 2014年3期
王李民,鄭啟寧,楊俊東
(1.海軍92493部隊,遼寧葫蘆島125001;2.海軍航空兵學院,遼寧葫蘆島125001)
0 引言
單脈沖雷達由于測角精度高而得到廣泛應用,其對和差通道中的相位一致性要求較高,因為其直接影響測量精度,相位不平衡有可能造成測角靈敏度降低甚至測量結果完全失真。在設備交驗過程中及重大任務前,都應對和差通道相位的一致性進行檢查,對于由于種種內部和外部因素導致的一致性超差,應及時分析誤差產生原因,并采用信號處理等方式加以補償,以保證測角精度。本文對某型火控雷達在工作中出現的相位跳變問題進行分析,闡述了影響雷達相位一致性的因素,并通過仿真分析了相關參數對雷達測角特性的影響。
1 振幅和差式單脈沖測角理論
單脈沖測角技術是通過比較兩個或多個同時天線波束的接收信號來獲得精確的角位置信息[1]。在跟蹤雷達中,單脈沖處理器輸出的角偏差誤差信號送入雷達天線的隨動角伺服系統,以驅動天線向角誤差減小的方向運動,從而使天線波束連續追隨目標前進[2]。
在振幅和差單脈沖雷達系統中,如圖1所示,為了確定一個平面內的角坐標,就要形成兩個互相迭交的天線方向圖,并設它們的中心線對等強信號方向偏離的角度分別為±θs。在零軸上,兩波束圖幅度相等,當目標在A點,并且從零偏離θ角時,則低波束接收信號大于高波束接收信號,兩個信號的幅度差即表示等強方向的偏移量,而兩個幅度之差的符號則表示等強方向相對于目標的偏離方向。典型的單脈沖雷達接收機通常有和、方位差、俯仰差三個接收支路,并對接收信號進行歸一化處理。因為火控雷達在跟蹤目標時,目標始終處于天線電軸附近,所以和信號的幅度近似地與目標的偏差角無關,僅隨目標回波的大小而變,而且這種變化和、差信號都是一致的。通過對和、差信號進行歸一化,差信號中回波幅度變化的影響便能較好地消除。和差方向圖如圖2所示。
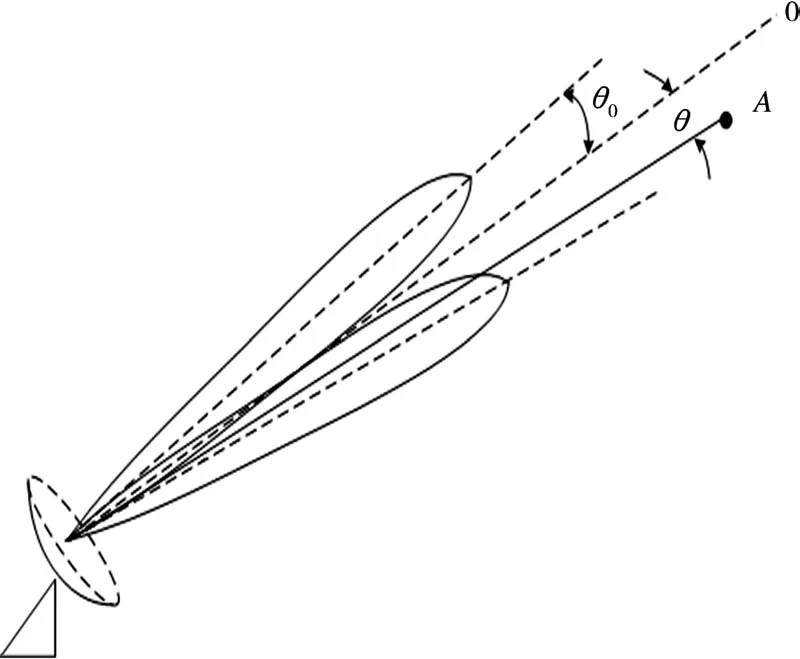
圖1 振幅定向法中角坐標的確定
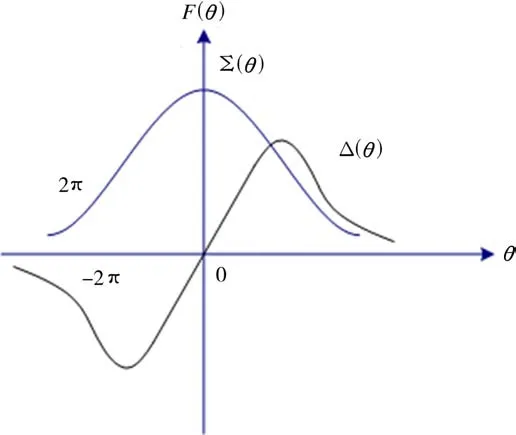
圖2 和差方向圖
下面簡要敘述單脈沖系統工作流程與原理。
設兩個分別與零軸方向偏離±θs的天線波束方向圖F1(θ)與F2(θ),當目標偏離等強信號方向的偏移量很小時,天線第一支路和第二支路輸出的信號由以下兩式確定:
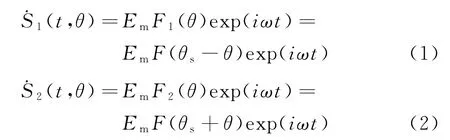
式中,Em為θ方向的目標回波信號。
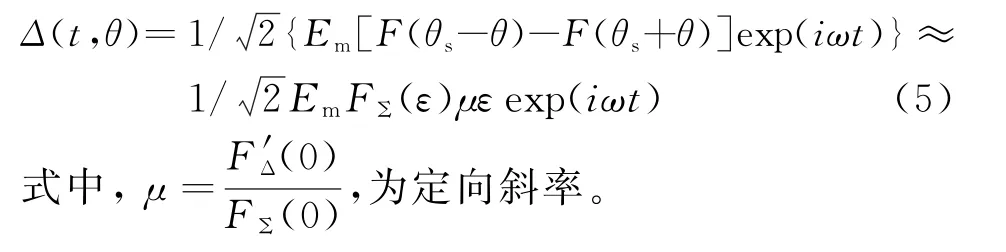
假定波導橋對功率平均分配,則波導橋輸出的和信號及差信號分別為

現假定目標的誤差角為ε,在跟蹤狀態,ε很小,將Δ展開成Talor級數并忽略高次項,則
2 通道不一致影響
比幅單脈沖雷達的角度提取一般采用和差支路相位檢波,圖3給出了雙平面內對目標進行單脈沖定向的幅度和、差單脈沖系統原理框圖。

圖3 幅度和差單脈沖系統原理框圖
單脈沖天饋線形成的和、差信號通常要經過高頻放大器、混頻放大器及中頻放大器再送到差路相位檢波器進行處理,最終差支路鑒相器輸出可表示為(取實部)

式中,Σ及φΣ分別為輸入接收機和支路的模及相角;Δ及φΔ分別為輸入接收機差支路的模及相角;E為AGC的比較電平;KΣ1,KΔ1分別為和、差支路高頻放大器、混頻放大器及中頻放大器部分總增益的模,其總相移分別為φKΣ,φKΔ。從式(6)可以看出,相位差的存在會使測角靈敏度降低。
為了得到較高的測角精度,設計中一般盡量采用數字補相方法使φKΣ與φKΔ之間的相位差為0。由于種種內部和外部因素,通道間的一致性很難得到保證,引起接收機相位不一致的原因有:
(1)零件很難嚴格按照給定的公差制造;
(2)零件在使用過程中不可避免地會老化,因而引起一些參數的變化;
(3)在設備的使用過程中,因個別元件的溫升使某些電路失調及失配;
(4)雷達可能會受到外界雜波的作用。
3 和、差通道相位不一致對測角精度的影響
為了分析通道相位差對雷達測角精度的影響,進行如下仿真。仿真研究中天線方向圖用高斯函數近似:

從圖4可以看出,60°相位不平衡會引起定向曲線斜率變小,測角靈敏度明顯降低,同時從圖5還可以看出,10°相位不平衡對定向特性曲線幾乎沒有影響。
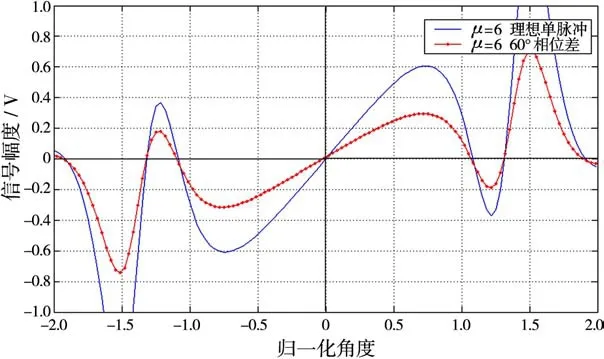
圖4 相位差為60°對測向曲線的影響
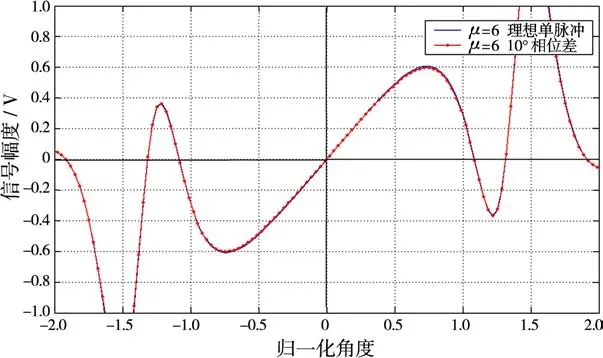
圖5 相位差為10°對測向曲線的影響
4 通道相位一致性改進方法
雷達通道相位不一致對測角精度、跟蹤質量都有直接的影響[3],因此一定要在必要的環節按一定的要求去控制相位差別。除了在設計時盡量保證各支路相位一致性外[4],還應在使用過程中采用相應的改進方法[5],以保證系統的測量精度,改進方法很多[6],本文主要從信號注入法和標定法兩個方面作介紹。
4.1 信號注入法
將合成信號源的射頻輸出接天線方位(俯仰)測試信號注入口,用示波器接中頻接收機相干檢波和路信號與方位(俯仰)差路信號。改變射頻點,在示波器上讀出每一點頻方位差(俯仰差)信號相對于和信號的相位延遲時間和信號周期,計算出每一點頻的相位差,利用信號處理方法對接收機三路通道進行相位修正。
4.2 標定法
在距離雷達站適當距離處架設高度滿足要求的信號源(或用氣球托起反射體),以形成孤立的點目標,以標定的電軸中心為參考點,將天線方位和俯仰各拉偏1 mrad,讀取方位(俯仰)誤差,改變頻點,記錄每一頻點的誤差,利用信號處理方法對接收機三路通道相位一致性進行補償。
通過補償和修正,接收通道相位誤差都能控制在10°之內,能夠滿足雷達測角精度要求。
5 改進方法效能分析
如果和通道與差通道之間存在相位不平衡,有相位差Δφ2,其影響主要反映在測角靈敏度的降低和天線電軸的漂移上。以某型雷達為例,由于微波接收機和路場放組件老化造成了相位差不穩定,通過信號注入法對相位進行校正。表1和表2分別是在和路場放更換前和更換后和路與俯仰支路相位差的變化情況。
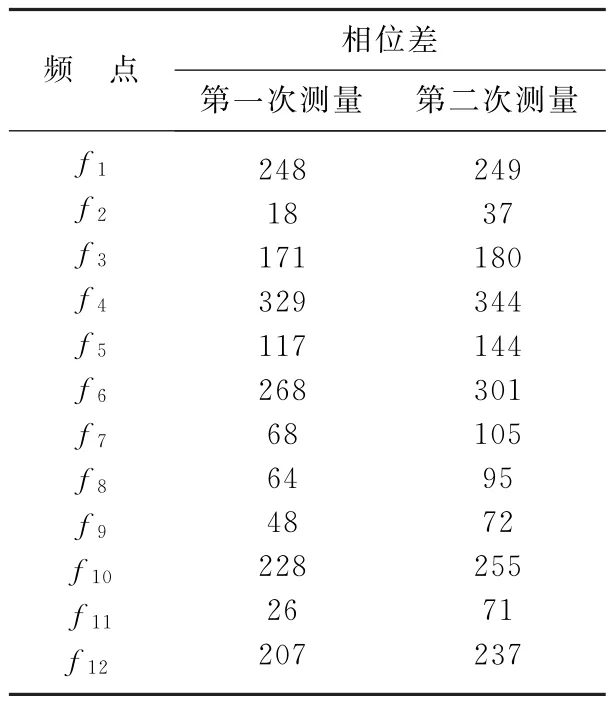
表1 和路場放更換前數據對比
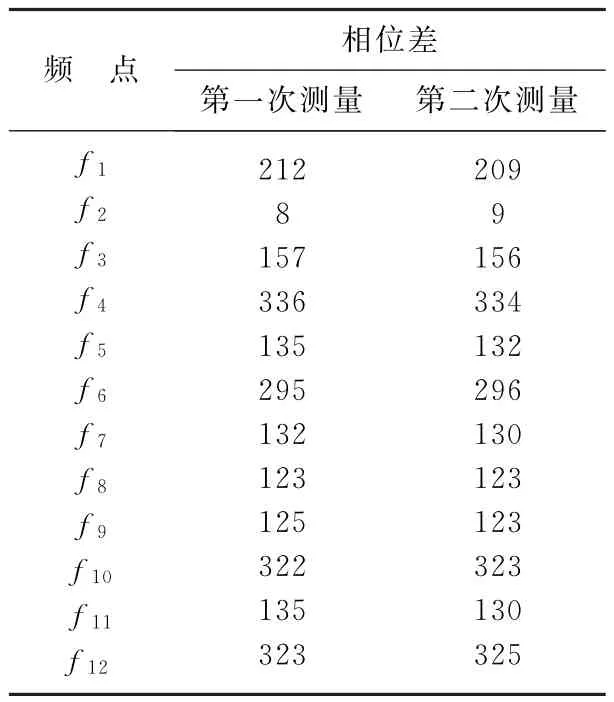
表2 和路場放更換后數據對比
從表1可以看出,由于微波組件老化造成通道相位差變化最大達到45°,在更換相關組件并經過相位調整后,通道相位差在10°之內,如表2所示。
6 結束語
本文研究了實際中應用比較廣泛的振幅和差式單脈沖雷達測角特性,分析了通道相位不一致的影響因素,結合實例介紹了高頻器件老化造成和差通道相位差的變化情況。最后通過仿真模擬了誤差大小對定向曲線的影響,仿真結果表明,相位不平衡會極大地影響單脈沖雷達測角靈敏度,進一步說明了驗前相位檢查的重要性。
[1]黃虹.單脈沖雷達[M].北京:國防工業出版社,1975.
[2]方棉佳,呂濤.單脈沖和差波束測角的精度研究[J].雷達科學與技術,2013,11(6):645-649.FANG Mian-jia,LV Tao.Research on Precision of Angle Measurements in Monopulse Sum-Difference Beams[J].Radar Science and Technology,2013,11(6):645-649.(in Chinese)
[3]SHERMAN S M,BARTON D K.Monopulse Principles and Techniques[M].Dedham,MA:Artech House,1984.
[4]鄭生華.振幅和差單脈沖雷達接收機高幅-相一致性AGC的設計[J].現代電子,2000(4):37-40.
[5]姜義成,喻春曦.一種改善單脈沖雷達測角精度的新方法[J].雷達科學與技術,2009,7(5):380-383.JIANG Yi-cheng,YU Chun-xi.A Novel Approach for Angle Measuring Precision Improvement in Monopulse Radar System[J].Radar Science and Technology,2009,7(5):380-383.(in Chinese)
[6]劉洪燕,郜麗鵬.比幅比相測角系統信號處理技術研究[J].應用科技,2003,30(10):7-9.
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公共安全(2017年11期)2017-02-06 05:28:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
燕山大學學報(2015年4期)2015-12-25 02:19:49
