無驗(yàn)潮測(cè)深系統(tǒng)精度分析
2014-03-16 06:55:41陳金湖
中國(guó)港灣建設(shè) 2014年6期
陳金湖
(廣州南華工程管理有限公司,廣東 廣州 510230)
無驗(yàn)潮測(cè)深系統(tǒng)精度分析
陳金湖
(廣州南華工程管理有限公司,廣東 廣州 510230)
三亞防波堤施工中采用無驗(yàn)潮測(cè)深系統(tǒng)對(duì)施工質(zhì)量進(jìn)行過程控制。根據(jù)其原理和特點(diǎn),通過對(duì)儀器的系統(tǒng)誤差、無波浪影響下測(cè)深系統(tǒng)的誤差和在波浪影響下測(cè)深系統(tǒng)的誤差的精度比對(duì),測(cè)量精度滿足規(guī)范要求。與傳統(tǒng)測(cè)量模式相比,測(cè)量精度更高。
無驗(yàn)潮測(cè)深系統(tǒng);精度比對(duì);精度分析
無驗(yàn)潮測(cè)深系統(tǒng)是 RTK-GPS 定位技術(shù)的運(yùn)用。在三亞防波堤工程施工中,引進(jìn)了無驗(yàn)潮測(cè)深系統(tǒng)對(duì)施工質(zhì)量進(jìn)行過程控制,并承擔(dān)水下工程施工質(zhì)量驗(yàn)收工作,系統(tǒng)的測(cè)量精度直接影響到工程質(zhì)量控制和對(duì)施工成果的評(píng)價(jià)。為確保測(cè)量精度,監(jiān)理工程師對(duì)系統(tǒng)進(jìn)行了精度比對(duì)和分析工作。
1 無驗(yàn)潮測(cè)深系統(tǒng)的原理和特點(diǎn)
無驗(yàn)潮測(cè)深系統(tǒng)由 RTK-GPS、測(cè)深儀、數(shù)據(jù)采集計(jì)算機(jī)組成。其原理為利用 RTK-GPS 的高精度三維定位技術(shù)和回聲測(cè)深儀通過計(jì)算機(jī)同步測(cè)定水面某點(diǎn)的瞬時(shí)高程和水深值,推算該點(diǎn)的海底高程。RTK-GPS 通過與測(cè)量軟件相結(jié)合,可以實(shí)現(xiàn)波浪補(bǔ)償?shù)墓δ堋?/p>
相對(duì)傳統(tǒng)的水深測(cè)量系統(tǒng),無驗(yàn)潮測(cè)深系統(tǒng)最突出的特點(diǎn)是運(yùn)用高精度 GPS 進(jìn)行三維定位,無需建立臨時(shí)驗(yàn)潮站和人工驗(yàn)潮,人工操作環(huán)節(jié)少,人為引起的錯(cuò)誤和誤差機(jī)率小,測(cè)量精度高。
2 無驗(yàn)潮測(cè)深系統(tǒng)精度的理論分析
2.1 儀器的系統(tǒng)誤差
在測(cè)量過程中,構(gòu)成系統(tǒng)的各類儀器、設(shè)備存在系統(tǒng)誤差[1],分別表示為:測(cè)深儀的 系統(tǒng)誤差ΔSi;GPS 的系統(tǒng)誤差 ΔHi;連接 GPS 與測(cè)深儀換能器連桿的長(zhǎng)度測(cè)量誤差 ΔLi。
2.2 無波浪影響下測(cè)深系統(tǒng)的誤差
在無波浪影響的情況下,海底面某點(diǎn)高程的瞬時(shí)測(cè)量值可表示為:
H=HGPS+L+S (1)
式中:HGPS為 GPS 測(cè)定的海面某點(diǎn)瞬時(shí)高程測(cè)量值;L為連桿長(zhǎng)度的測(cè)量值;S為測(cè)深儀測(cè)定的海面某點(diǎn)瞬時(shí)水深值。
考慮測(cè)量過程中的儀器誤差,對(duì)儀器引起的誤差進(jìn)行了修正,則有海底面某點(diǎn)高程的真值H0為:
H0=(HGPS+ ΔHi)+(L+ ΔLi)+(S+ ΔSi)=
H+(ΔHi+ ΔLi+ ΔSi)=H+ Δ (2)
也就是測(cè)深系統(tǒng)的誤差為 Δ:Δ = ΔHi+ ΔLi+ΔSi。
可以看出,在無波浪影響的情況下,無驗(yàn)潮測(cè)深系統(tǒng)的測(cè)量精度取決于構(gòu)成系統(tǒng)的儀器精度。同時(shí),由于 RTK-GPS 的三維測(cè)量精度達(dá)到厘米級(jí),本工程所用儀器的垂直精度為 3 cm+2 × 10-6× D,D 為測(cè)量距離,km;測(cè)深儀的測(cè)量精度為±( 0.4%+ 5 cm);連桿的測(cè)量精度用鋼卷尺量可以達(dá)到毫米級(jí),對(duì)于一個(gè)固定測(cè)區(qū),ΔHi和 ΔLi是固定的,且其誤差值相對(duì)于測(cè)深值可以忽略不計(jì),故影響測(cè)量系統(tǒng)的誤差取決于測(cè)深儀的測(cè)量精度,而經(jīng)過校準(zhǔn)后的測(cè)深儀精度可以滿足規(guī)范的要求。
2.3 在波浪影響下測(cè)深系統(tǒng)的誤差
在波浪影響下,測(cè)量系統(tǒng)將隨著測(cè)量船一起發(fā)生左右、前后和上下的搖動(dòng),測(cè)量系統(tǒng)除固定的儀器誤差外,將不可避免的發(fā)生由于搖動(dòng)引起的誤差,其誤差發(fā)生過程是復(fù)雜的綜合運(yùn)動(dòng),分析如下:
1)各種儀器系統(tǒng)誤差同樣存在。
2)當(dāng)系統(tǒng)在風(fēng)浪條件下產(chǎn)生搖擺,瞬時(shí)測(cè)量中心軸線將以軸線上某一點(diǎn)A為圓心發(fā)生傾斜并與原軸線方向形成一夾角α,同時(shí)整個(gè)系統(tǒng)隨著波浪發(fā)生上下位移,對(duì)系統(tǒng)的運(yùn)動(dòng)引起的誤差進(jìn)行分析,難度較大,但其運(yùn)動(dòng)對(duì)平面定位的影響不會(huì)超出規(guī)范允許范圍,其在垂直方向的運(yùn)動(dòng)將對(duì)測(cè)深精度有比較大的影響,為方便分析,將系統(tǒng)的綜合運(yùn)動(dòng)簡(jiǎn)化為A點(diǎn)的垂直運(yùn)動(dòng)和測(cè)量中心軸線以A點(diǎn)為中心旋轉(zhuǎn)運(yùn)動(dòng)。
設(shè)波浪作用時(shí),A 點(diǎn)高程變化量為 ΔD,測(cè)量中心軸線以A點(diǎn)為中心旋轉(zhuǎn)一夾角α。分析測(cè)量過程,A點(diǎn)高程變化量ΔD將在測(cè)量過程由測(cè)深部分消除,故不考慮其影響。結(jié)合瞬時(shí)其他誤差,從式 (2) 可以推導(dǎo)出式 (3):

則此時(shí)系統(tǒng)的誤差為 Δ′:
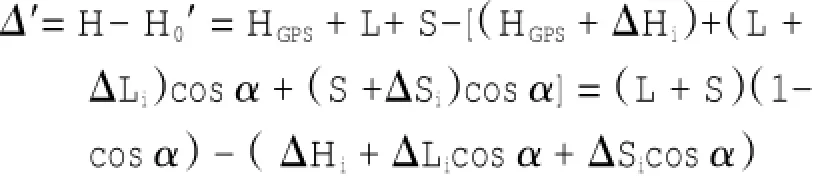
從上面分析,系統(tǒng)在波浪作用下存在兩項(xiàng)誤差,其中 (ΔHi+ ΔLicos α + ΔSicos α) 主要是儀器誤差引起,可以通過嚴(yán)格校準(zhǔn)工作得到控制。對(duì)于[( L+S )( 1-cos α )]來說,該項(xiàng)主要是波浪作用下縱橫搖擺發(fā)生角度α的傾斜引起的,在本工程中最大水深大于 30m,(L+S)的值近 40m,其引起的誤差是不可忽視的;另外,(1-cosα)的值將隨α的加大而明顯增大,在某一瞬時(shí),[( L+S )( 1-cos α)]的值隨 α 的加大而增大且恒為正值,如圖 1(圖中設(shè) L+S=40m),故 [(L+S)(1-cosα)]的值恒為正值,是影響系統(tǒng)精度的關(guān)鍵誤差項(xiàng)目;而對(duì)于不同的時(shí)刻,即不同瞬時(shí)點(diǎn),S 及 α 為無規(guī)律變化值,故 [(L+S)(1-cosα)]的值呈無規(guī)律變化,無法通過合理的方法克服,也無法確定合理的修正值。
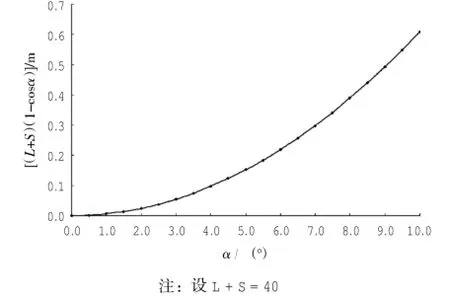
圖1 α 與[(L+S)(1-cosα)]關(guān)系圖Fig.1 Relation between α and[( L+S )(1-cos α)]
綜上所述,在波浪影響下作業(yè),系統(tǒng)將存在不可忽略的誤差,測(cè)量精度將下降,其誤差為瞬時(shí)綜合誤差,隨機(jī)出現(xiàn),無規(guī)律,無法采用合理的方法消除。
3 無驗(yàn)潮測(cè)深系統(tǒng)的精度驗(yàn)證
通過理論分析,只得出定性的結(jié)論,未有定量的結(jié)果。鑒于防波堤墊層石的厚度僅為 1.5m左右,且對(duì)坡面質(zhì)量要求高,從質(zhì)量控制的角度出發(fā),應(yīng)對(duì)該系統(tǒng)在波浪影響下的測(cè)深精度進(jìn)行驗(yàn)證,并通過試驗(yàn)統(tǒng)計(jì)分析找出該系統(tǒng)在風(fēng)浪工況下的使用范圍,以保證工程質(zhì)量。
3.1 比對(duì)試驗(yàn)方案設(shè)計(jì)
比對(duì)試驗(yàn)區(qū)水深大于 30m,采用 SDH-13D回聲測(cè)深儀( 精度 0.4%+5 cm )及 HD-5200 型RTK-GPS( 精度 3 cm+2 × 10-6× D)進(jìn)行比對(duì)。
1) 試驗(yàn)項(xiàng)目。實(shí)時(shí)相位差分定位系統(tǒng)(RTK-GPS)的三維定位穩(wěn)定性試驗(yàn);測(cè)深儀的測(cè)深精度和穩(wěn)定性;無驗(yàn)潮測(cè)深法在波浪條件下的測(cè)深精度。
2) 平面和高程控制。平面控制采用任意坐標(biāo)系,高程控制采用當(dāng)?shù)乩碚撋疃然鶞?zhǔn)面。采用業(yè)主提供的經(jīng)承包人校核合格的控制點(diǎn)資料。GPS參數(shù)、坐標(biāo)轉(zhuǎn)換關(guān)系采用承包人的現(xiàn)用資料。
3) GPS 穩(wěn)定性試驗(yàn)。在施工區(qū)附近已知高級(jí)控制點(diǎn)架設(shè) GPS 接收機(jī),連續(xù)觀測(cè) 2 h 以上,從外業(yè)采集的數(shù)據(jù)分析GPS在本工程施工環(huán)境中的三維定位精度和穩(wěn)定性。
4)測(cè)深儀的測(cè)深精度和穩(wěn)定性試驗(yàn)。采用檢查板比對(duì)法。測(cè)定 0~30m 范圍內(nèi)儀器差值,分析儀器的精度和穩(wěn)定性。在海面較平靜時(shí),結(jié)合潮位預(yù)報(bào),于高平潮或低平潮時(shí)段在擬定試驗(yàn)區(qū)域附近對(duì)測(cè)深儀進(jìn)行測(cè)定。
5)驗(yàn)潮。設(shè)立臨時(shí)驗(yàn)潮站進(jìn)行潮位觀測(cè)。比對(duì)試驗(yàn)區(qū)附近埋設(shè)工作點(diǎn),按四等水準(zhǔn)精度從高級(jí)水準(zhǔn)點(diǎn)引測(cè)工作點(diǎn)高程。按圖根水準(zhǔn)精度測(cè)設(shè)水尺。水尺的設(shè)立按規(guī)范規(guī)定進(jìn)行。驗(yàn)潮每 10min觀測(cè)1次,內(nèi)業(yè)整理采用繪制水位曲線圖修正讀數(shù)誤差。
6) 無驗(yàn)潮測(cè)深法在波浪條件下的測(cè)深精度。考慮波浪條件下橫搖、縱搖情況,測(cè)深按規(guī)范有關(guān)要求進(jìn)行。
在施工區(qū)附近選擇較平坦區(qū)域,采用定點(diǎn)同步比對(duì),即測(cè)量船系在浮鼓上,處于相對(duì)自由狀態(tài),同時(shí)采用傳統(tǒng)測(cè)量法和無驗(yàn)潮測(cè)量法進(jìn)行測(cè)量。傳統(tǒng)測(cè)量方法測(cè)出該點(diǎn)一系列海床面標(biāo)高,進(jìn)行相關(guān)校正后作為該點(diǎn)“參考真值”。
計(jì)算機(jī)同步讀取無驗(yàn)潮測(cè)深法的一系列海床面高程瞬時(shí)值,與測(cè)量參考真值比較,得出瞬時(shí)測(cè)深誤差。盡可能在此基礎(chǔ)上進(jìn)行擴(kuò)大測(cè)量船兩搖幅度的測(cè)深精度的理論分析,確定無驗(yàn)潮測(cè)深法在工程的適用范圍。
3.2 比對(duì)成果和分析
3.2.1 比對(duì)試驗(yàn)成果
比對(duì)試驗(yàn)在 GPS 穩(wěn)定性及測(cè)深儀比對(duì)合格的前提下進(jìn)行,歷時(shí)約1 h,試驗(yàn)同步采集測(cè)深儀的深度讀數(shù)、GPS 的平面位置及水面高程讀數(shù)和瞬時(shí)潮位,共采集數(shù)據(jù) 3 023 組,其中有效數(shù)據(jù)2 988 組,數(shù)據(jù)有效率為 98.8%。所有數(shù)據(jù)分布在以數(shù)據(jù)平面位置中心為圓心、半徑 3.9m 的范圍內(nèi),半徑為 2.0m 內(nèi)的數(shù)據(jù)占 78.8%,具體分布情況見表1。
根據(jù)設(shè)計(jì)圖紙,該區(qū)海床面呈 1 ∶50 的自然坡度,平坦無局部隆起,則數(shù)據(jù)分布圓內(nèi)海床面的高差小于 0.2m,滿足規(guī)范對(duì)“圖上 1mm 范圍內(nèi)水深點(diǎn)深度比對(duì)互差 ≤ 0.02H( 0.52m )”的要求,可以認(rèn)為全部數(shù)據(jù)代表同一測(cè)點(diǎn)。
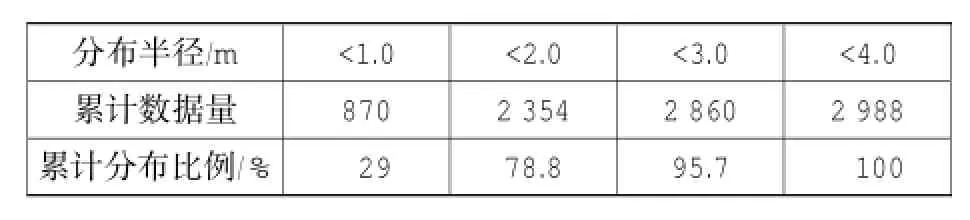
表1 數(shù)據(jù)分布半徑比例Table1 Proportion of data distribution radius
3.2.2 參考真值
比對(duì)前,先采用加大加重的檢查板對(duì)測(cè)深儀的測(cè)量精度進(jìn)行比對(duì)調(diào)試,確保測(cè)深精度,在采集數(shù)據(jù)的同時(shí)在臨時(shí)驗(yàn)潮站進(jìn)行人工驗(yàn)潮,通過繪制潮位曲線,減小人工驗(yàn)潮讀數(shù)誤差,內(nèi)業(yè)對(duì)采集的水深值進(jìn)行有關(guān)改正后,結(jié)合潮位推算每組瞬時(shí)測(cè)點(diǎn)的海床面高程 Hi。設(shè)分布在數(shù)據(jù)中心點(diǎn)的周圍的機(jī)率相等,受波浪影響的情況機(jī)率相同,則取 Hi平均值為該點(diǎn)海床面高程,此時(shí)可以消除海面波浪引起的水面高程誤差和海床面自然坡降引起的誤差;但與無驗(yàn)潮一樣,測(cè)深同樣存在搖擺引起的誤差:Δ = (L+S)(1-cosα)-( ΔHi+ ΔLicos α + ΔSicos α )。
應(yīng)該說,通過以上措施后,誤差可簡(jiǎn)化為Δ= S( 1-cos α ),H 為 Hi的平 均值( H=25.96m ),如圖 2 所示,設(shè)該海床面高程真值為 H0,則有 H0= H-Δ,故把平均值當(dāng)海床面高程只是基本接近真值,其誤差在規(guī)范允許的范圍內(nèi),在一定程度上可以用來檢驗(yàn)無驗(yàn)潮測(cè)深系統(tǒng)的測(cè)量精度。經(jīng)過處理后,該點(diǎn)高程真值為 H0=25.96-Δ,Δ 值的變化規(guī)律難以確定,但恒有 H0<25.96,取 25.96 為參考真值,以檢驗(yàn)無驗(yàn)潮測(cè)深系統(tǒng)的測(cè)量精度。

圖2 高程真值與誤差的關(guān)系Fig.2 Relation between the true valueand error of elevation
3.2.3 波浪分析
比對(duì)前,先在控制點(diǎn)上對(duì) RTK-GPS 進(jìn)行比對(duì),確保水面高程的測(cè)量精度,對(duì)采集的數(shù)據(jù)運(yùn)用 Excel電子表格的圖表功能繪制波浪分析圖(如圖 3),分析各種波高的出現(xiàn)比例,經(jīng)統(tǒng)計(jì)分析,在比對(duì)試驗(yàn)過程中,測(cè)區(qū)波浪情況如表 2 所示[2]。從波浪分析表可見,本次比對(duì)有 92.3%為波高0.6m 以下范圍,波高 0.6m 以上僅為 8%左右,且其出現(xiàn)的比例很小,故本次比對(duì)只能代表無驗(yàn)潮測(cè)深系統(tǒng)在波高0.6m 以下的精度情況。
3.2.4 無驗(yàn)潮測(cè)深系統(tǒng)的比對(duì)結(jié)果分析
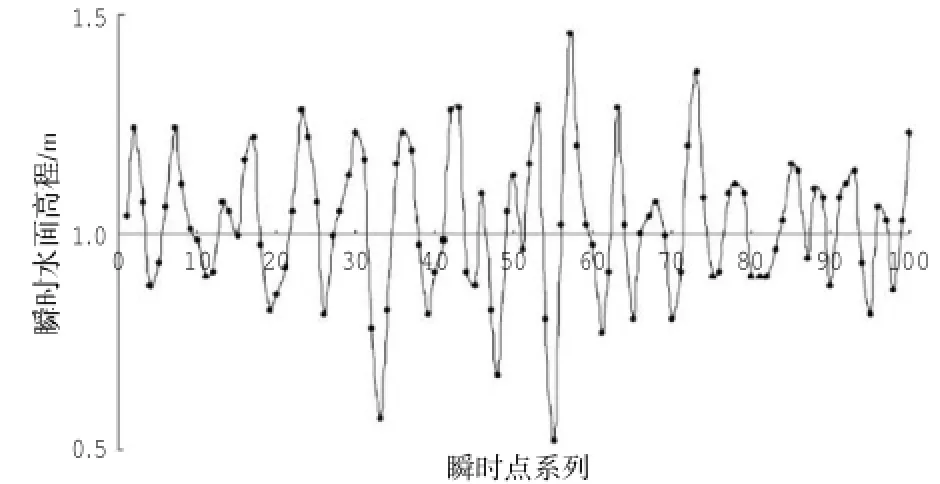
圖3 波浪分析圖Fig.3 W ave analysis diagram
采用由無驗(yàn)潮測(cè)深系統(tǒng)逐點(diǎn)測(cè)量值與參考真值作比較,即 Δ =H無-25.96,得出 2 988 個(gè)誤差值,對(duì)其進(jìn)行統(tǒng)計(jì)分析,誤差值分布如表3所示,可以看出,96%的測(cè)點(diǎn)誤差在規(guī)范規(guī)定的允許限差 0.02 H( 0.52m )之內(nèi),且誤差在 0.3m 以內(nèi)占74.6%,分析可以認(rèn)為無驗(yàn)潮測(cè)深系統(tǒng)在 0.6m 波高的情況下,測(cè)量精度滿足規(guī)范要求。

表2 波浪分析表Tab le2 W aveanalysis table

表3 測(cè)深誤差統(tǒng)計(jì)表Tab le 3 Statistical table of sounding error
同時(shí),還可以分析出無驗(yàn)潮測(cè)深系統(tǒng)測(cè)量值存在的另一情況,在 2 988 個(gè)測(cè)點(diǎn)中,存在 2 142個(gè)測(cè)點(diǎn)的值小于測(cè)量真值,即 Δ =H無-25.96<0,其比例為 72%,符合理論分析的結(jié)果,所以,無驗(yàn)潮測(cè)深系統(tǒng)測(cè)量精度滿足規(guī)范要求,與傳統(tǒng)測(cè)量模式比,其測(cè)量精度更高。
4 結(jié)語
通過簡(jiǎn)化模型和實(shí)證比對(duì)的方法對(duì)無驗(yàn)潮測(cè)深系統(tǒng)精度進(jìn)行了分析,結(jié)果表明在 0.6m 波浪條件下,此系統(tǒng)具有較高的精度,能滿足相關(guān)規(guī)范的要求。由于分析模型和比對(duì)方案設(shè)計(jì)存在一定的局限性,比對(duì)分析結(jié)果不能作為此系統(tǒng)在其他波高條件下測(cè)量精度的依據(jù),故其精度和使用范圍還有待于進(jìn)一步的分析研究,以指導(dǎo)施工和推廣。
[1] 盧軍民,安延云,張東明,等.無驗(yàn)潮測(cè)深技術(shù)中影響水深測(cè)量精度的幾個(gè)問題探討[J].水運(yùn)工程,2010(5):50-54. LU Jun-min,ANYan-yun,ZHANGDong-ming,etal.Some issues affecting the accuracy of non-tide sounding servey[J].Port&Waterway Engineering,2010(5):50-54.
[2] 胡志渠,李雁.RTK 無驗(yàn)潮測(cè)量技術(shù)用于港口水深測(cè)量[J].港工技術(shù),2006(4):57-58. HU Zhi-qu ,LI Yan.Application of RTK surveying technique without tidal observation to depth sounding of port[J].Port Engineering Technology,2006(4):57-58.
[3] 張發(fā)棟,虞祖培.GPS 無驗(yàn)潮測(cè)深技術(shù)在水深測(cè)量中的應(yīng)用[J].港工技術(shù),2004(6):54-55. ZHANGFa-dong,YU Zu-pei.Application ofGPSno-tide sounding technique in sounding surveys[J].Port Engineering Technology,2004(6):54-55.
Accuracy analysis on the non tidal sounding system
CHEN Jin-hu
(Guangzhou Nanhua ProjectManagementCo.,Ltd.,Guangzhou,Guangdong510230,China)
No tide sounding system isused for the process control of construction quality in Sanyabreakwater construction.According to its princip lesand characteristics,through the precision comparison of the instrument system error,sounding system errorby nowavesaffectandmeasurementerror in thewaves influence,theaccuracy of the system canmeet regulatory requirements.Compared with the traditionalmeasurementmode,this system ishighermeasuring accuracy.
no tide sounding system; precision comparison; accuracy analysis
U652.62
A
2095-7874(2014)06-0069-04
10.7640/zggw js201406021
2014-02-17
2014-03-27
陳金湖 (1973 — ),男,廣東澄海人,高級(jí)工程師,主要從事港口監(jiān)理工作。E-mail:654829524@qq.com
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22