基于LabVIEW與PLC通信的電液伺服振動(dòng)臺(tái)PDF控制
2014-03-18 07:20:00鄢華林祁圣民張鵬李亞南
機(jī)床與液壓 2014年20期
鄢華林,祁圣民,張鵬,李亞南
(江蘇科技大學(xué),江蘇鎮(zhèn)江212003)
電液伺服振動(dòng)臺(tái)是一種重要的實(shí)驗(yàn)設(shè)備,它廣泛應(yīng)用于航天、汽車、建筑等許多重要工業(yè)領(lǐng)域。將實(shí)驗(yàn)對(duì)象固定在實(shí)驗(yàn)臺(tái)上,通過模擬試件受載時(shí)的情況,來研究載荷對(duì)試件的影響、分析試件的可靠性或者研究減震系統(tǒng)的性能。控制器作為電液伺服振動(dòng)臺(tái)的控制核心顯得非常重要。通過利用ActiveX 技術(shù)使PLC 與LabVIEW 通信來實(shí)現(xiàn)對(duì)電液伺服臺(tái)的控制,該控制系統(tǒng)的控制方式為PDF 控制,通過得出的試驗(yàn)曲線,可突出PDF 控制方式在液壓伺服振動(dòng)臺(tái)應(yīng)用中的優(yōu)越性。
1 控制系統(tǒng)原理簡(jiǎn)介
1.1 控制系統(tǒng)的構(gòu)成
該試驗(yàn)臺(tái)為一維單缸電液伺服振動(dòng)臺(tái),主要是實(shí)現(xiàn)對(duì)液壓缸的位置控制,如圖1所示是該系統(tǒng)的工作流程圖。
該系統(tǒng)主要由PC、編碼器、PLC、D/A 模塊、功率放大器、伺服閥、液壓缸等組成。使用ActiveX技術(shù)保證LabVIEW 與PLC 進(jìn)行正常通信,將PC 中的LabVIEW 作為參考量輸入元件即指令元件,編碼器作為測(cè)量反饋元件,PLC 作為控制器即比較元件,D/A 模塊為數(shù)模轉(zhuǎn)換裝置。該控制系統(tǒng)將LabVIEW作為上位機(jī)與PLC 進(jìn)行通信,從LabVIEW 中輸入設(shè)定值信號(hào),經(jīng)過編寫的PLC 程序進(jìn)行邏輯運(yùn)算,將處理后的數(shù)據(jù)送給D/A 模塊,經(jīng)過功率放大器后將信號(hào)傳輸給伺服閥來控制液壓缸動(dòng)作,液壓缸的實(shí)際位置由編碼器采集并將數(shù)據(jù)反饋給PLC。
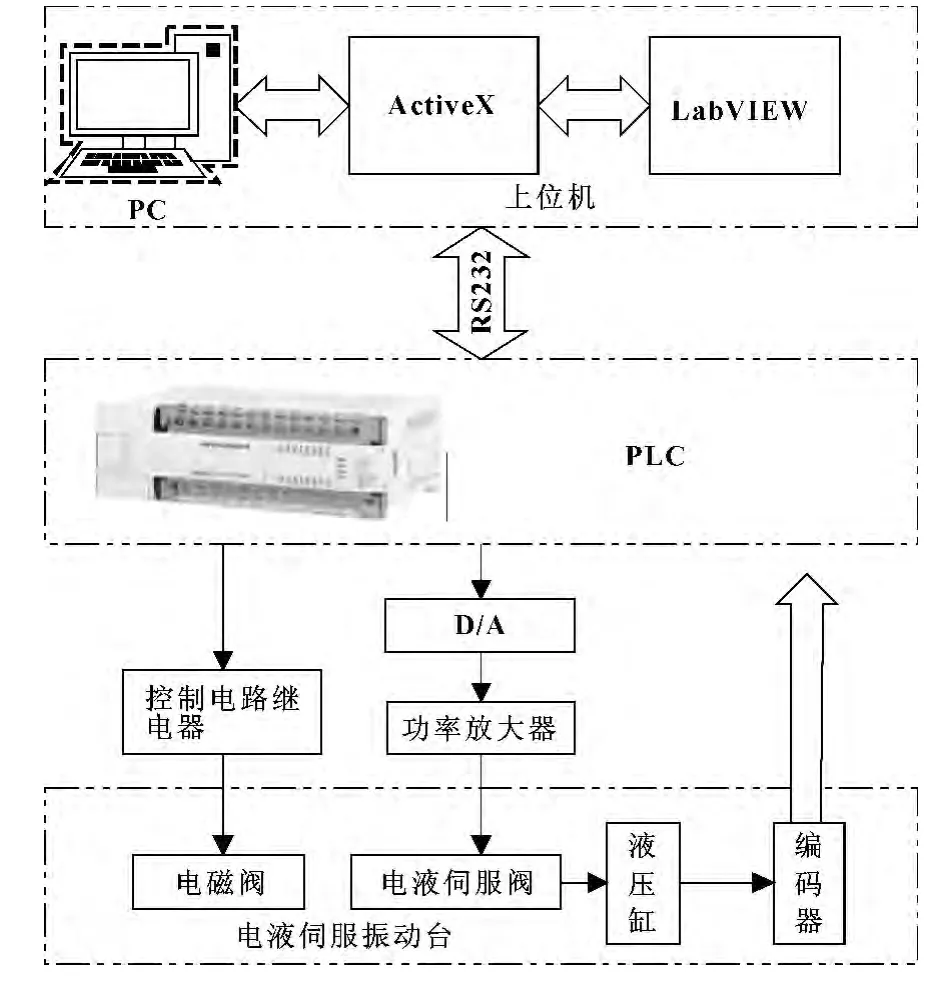
圖1 系統(tǒng)工作流程圖
1.2 電液伺服振動(dòng)臺(tái)PDF 控制原理
負(fù)載流量線性化方程:

式中:qL為負(fù)載流量;Kq為流量增益;xV為滑閥位移;Kc為流量壓力系數(shù);pL為負(fù)載壓力。
流量連續(xù)性方程:

式中:AP為液壓缸活塞有效面積;xP為活塞位移;CtP為液壓缸總泄漏系數(shù);Vt為總壓縮體積;βe 為有效體積彈性模量。
忽略閥腔和管道總?cè)莘e和油液的壓縮性,將式(2)簡(jiǎn)化為:

液壓缸活塞的動(dòng)力學(xué)平衡方程:

式中:mt為活塞及負(fù)載折算到活塞上的總質(zhì)量;BP為活塞及負(fù)載的黏性阻尼系數(shù);FL為作用在活塞上的任意外負(fù)載力。
缸輸出位移對(duì)伺服閥輸入電信號(hào)的傳遞函數(shù):

所以:

由式(6)可知此系統(tǒng)為二階系統(tǒng),系統(tǒng)框圖如圖2所示。
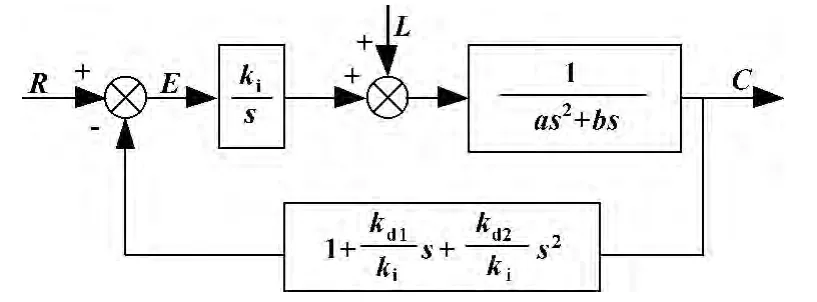
圖2 微分反饋控制方框圖
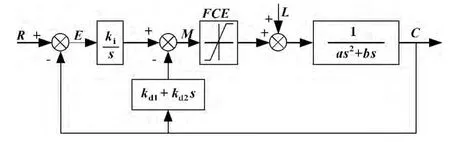
圖3 偽微分反饋控制方框圖
從圖2 中可看出對(duì)輸出信號(hào)C 微分經(jīng)過積分環(huán)節(jié)之后仍是C,這就說明沒有必要對(duì)輸出信號(hào)C 進(jìn)行微分,可更改圖2 為圖3。
2 控制系統(tǒng)實(shí)現(xiàn)方法
用PLC 編寫PDF 程序的原理與數(shù)字PID 的原理相似,積分實(shí)際上是偏差累積的過程即,積分原理圖如圖4所示。
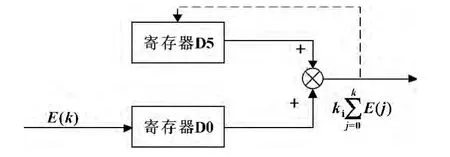
圖4 PLC 積分編程原理
編程之前先用區(qū)間復(fù)位指令對(duì)D0 與D5 兩個(gè)寄存器進(jìn)行復(fù)位操作,隨后將偏差值付給D0,再將D0與D5 相加,加完后的值再賦給D5,并用D5 的當(dāng)前值與更新的偏差值相加,這樣便實(shí)現(xiàn)了偏差的累積。微分實(shí)際上是kd2×[C(k)-C(k-1)],即是一個(gè)逐步相減的過程。原理與積分相類似,這里不再贅述。根據(jù)此原理編寫好PLC 程序后再編寫LabVIEW 程序,實(shí)現(xiàn)LabVIEW 與PLC 通信,該控制系統(tǒng)在通信時(shí)借助于ActiveX 技術(shù),使用LabVIEW 中的ActiveX 容器調(diào)用與PLC 通信的MX component 插件來實(shí)現(xiàn)兩者之間的通信。利用LabVIEW 中的“調(diào)用節(jié)點(diǎn)”可以實(shí)現(xiàn)對(duì)PLC 中的寄存器進(jìn)行賦值,同樣也可以用“調(diào)用節(jié)點(diǎn)”對(duì)PLC 中的輸入繼電器進(jìn)行置位。該系統(tǒng)通信時(shí),主要是為了能夠?qū)⒅低ㄟ^LabVIEW 輸入到對(duì)應(yīng)的寄存器中,并且能夠?qū)⑻幚砗蟮闹底x出來并將其以圖表的形式反映在LabVIEW 前面板上,方便用戶實(shí)時(shí)觀察被控對(duì)象的運(yùn)動(dòng)情況。此外,設(shè)置在LabVIEW 前面板上的布爾控件能夠?qū)LC 中的繼電器實(shí)現(xiàn)控制,以保證程序的正常運(yùn)轉(zhuǎn)。LabVIEW “調(diào)用節(jié)點(diǎn)”工作原理圖如圖5所示。

圖5 LabVIEW“調(diào)用節(jié)點(diǎn)”工作原理圖
如圖6所示為L(zhǎng)abVIEW 程序,液壓伺服振動(dòng)臺(tái)需要正弦激勵(lì),此系統(tǒng)使用“Create Analog Signal”VI 來產(chǎn)生正弦信號(hào),將信號(hào)換算成對(duì)應(yīng)的位移值后把值傳給對(duì)應(yīng)的寄存器中。LabVIEW 前面板如圖7所示。
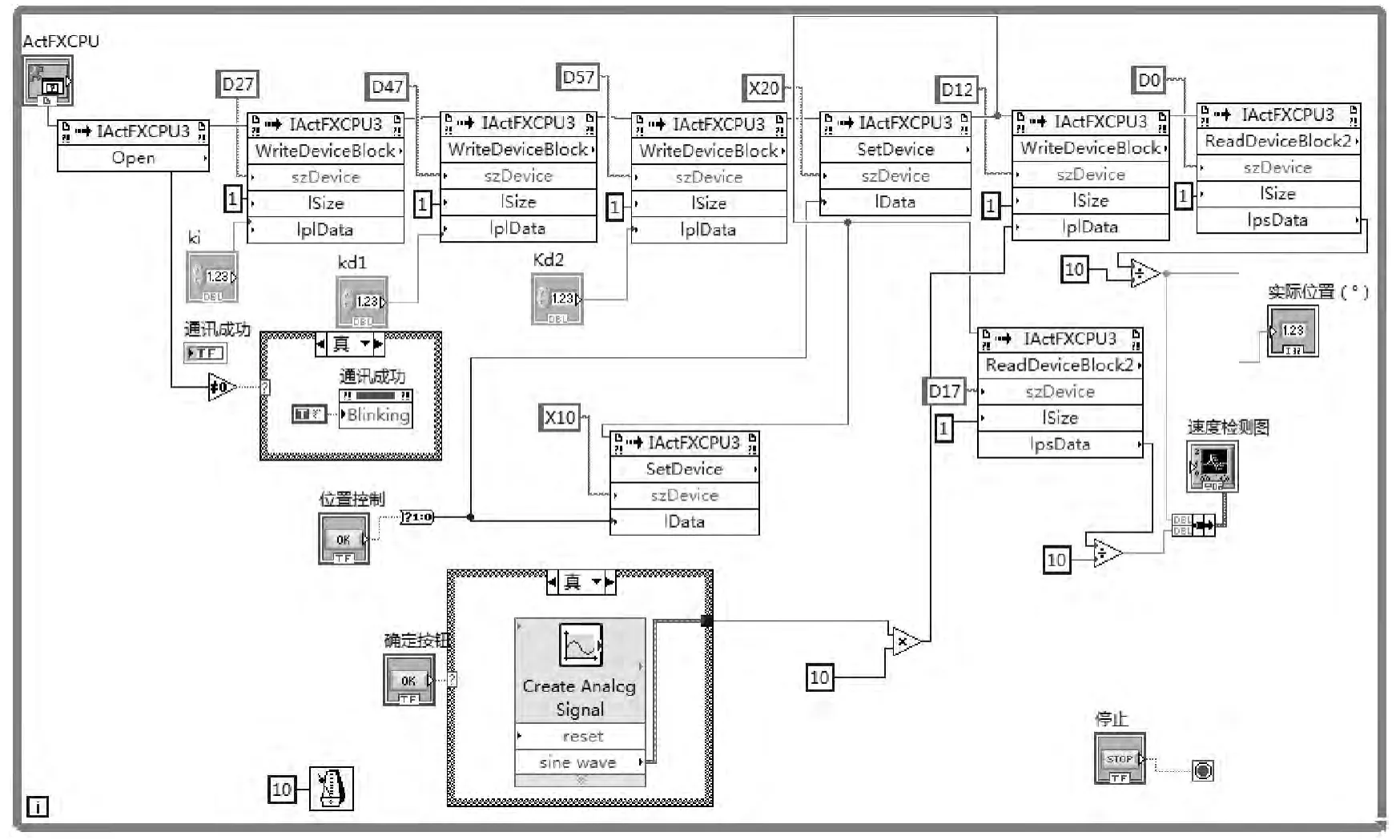
圖6 LabVIEW 程序
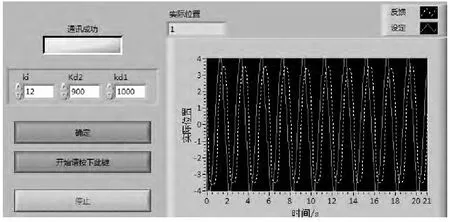
圖7 LabVIEW 前面板
通過指示燈的閃爍來判斷LabVIEW 與PLC 是否通信成功,雙擊“Create Analog Signal”VI 設(shè)定好振幅與頻率后,將程序切換到前面板,將PLC 切換到“run”,點(diǎn)擊LabVIEW 前面板上的“按鈕”便可進(jìn)行系統(tǒng)的實(shí)時(shí)監(jiān)控。
3 實(shí)驗(yàn)與總結(jié)
從該伺服控制系統(tǒng)的輸出微分方程可以看出,微分方程右邊只有一個(gè)強(qiáng)迫項(xiàng),被控變量對(duì)參考輸入具有很好的跟蹤能力;因?yàn)槲⒎诌\(yùn)算會(huì)帶來“噪聲”問題,工程上應(yīng)盡量避免對(duì)信號(hào)進(jìn)行微分。該電液伺服振動(dòng)臺(tái)控制系統(tǒng)在前向通道中雖然沒有對(duì)被控變量液壓缸的位移取微分,但在反饋回路中已實(shí)現(xiàn)對(duì)位移的微分運(yùn)算。也就是說在控制過程中不僅實(shí)現(xiàn)了直線位移反饋,也實(shí)現(xiàn)了線速度反饋,因而伺服控制性能明顯提高。實(shí)驗(yàn)測(cè)得曲線如圖8所示。

圖8 實(shí)驗(yàn)效果圖
該控制系統(tǒng)使用的是工業(yè)領(lǐng)域常用的PC + PLC控制模式,它以PLC 為核心控制器,由PC 完成對(duì)PLC 上傳數(shù)據(jù)的顯示、保存、報(bào)警等任務(wù),并能更改數(shù)據(jù)來控制PLC,既利用了PLC 控制精度好、可靠性高、抗干擾能力強(qiáng)的優(yōu)點(diǎn),又充分使用了PC 強(qiáng)大的數(shù)據(jù)處理能力與良好的可視化界面。此系統(tǒng)適用于低頻液壓系統(tǒng),具有控制方便、可靠、開放的特點(diǎn)。該系統(tǒng)已經(jīng)在實(shí)驗(yàn)中得到應(yīng)用,性能可靠。
[1]韓軍,常瑞麗.基于工控機(jī)和PLC 的過程裝備控制實(shí)驗(yàn)系統(tǒng)開發(fā)[J].機(jī)床與液壓,2011,39(6):98-100.
[2]曾文火,邵福.電液速度伺服偽微分反饋控制[J].液壓與氣動(dòng),2003(12):1-5.
[3]江灝,王慶豐.液壓綜合試驗(yàn)平臺(tái)的PLC 實(shí)時(shí)測(cè)控系統(tǒng)[J].機(jī)床與液壓,2007,35(1):182-184.
[4]陳錫輝.LabVIEW8.2 程序設(shè)計(jì)從入門到精通[M].北京:清華大學(xué)出版社,2007.
[5]李江全,劉恩博,胡蓉.LabVIEW 虛擬儀器數(shù)據(jù)采集與串口通信測(cè)控應(yīng)用實(shí)戰(zhàn)[M].北京:人民郵電出版社,2010.
[6]黃建龍,劉明哲,王華.液壓綜合試驗(yàn)臺(tái)及其監(jiān)控系統(tǒng)的研究[J].液壓與氣動(dòng),2007(10):10-12.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
人大建設(shè)(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
環(huán)球時(shí)報(bào)(2017-03-30)2017-03-30 06:44:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52