臍橙采摘機器人運動分析與研究
2014-03-18 07:20:10吳翠琴劉祚時
機床與液壓 2014年21期
關鍵詞:研究
吳翠琴,劉祚時
(江西理工大學機電工程學院,江西贛州341000)
0 前言
近幾十年來,機器人應用和機器人理論研究得到了飛速的發展。目前,機器人應用擴展到了人類生活生產的各個方面,極大地影響和促進了工業和科技事業的發展。作為人類生活中的重要一個分支農業生產,其自動化和機械化發展為農業機器人應用提供了必要條件。
果實采摘季節性強、勞動量大且人工費用較高,由于果實采摘的工況較為復雜,目前大部分果實采摘都是依靠人工。為了節約勞動力,降低勞動強度,減輕作業負擔,提高果實采摘效率,國內外學者對農業采摘機器人也進行了大量的研究。早在1968年美國學者就提出應用機器人對果實進行收獲,隨后國外很多學者就對果實采摘機器人進行了研究,并應用到了一些特定的果實采摘,如西班牙人對柑橘采摘機器人進行了研究,設計出了柑橘采摘機器人,英國西爾索農機研究所,研發了蘑菇采摘機器人。荷蘭人[1]對溫室內的黃瓜采摘進行了研究,設計出了溫室內黃瓜采摘機器人。日本學者Statoru SAKAI[2]對大質量果蔬采摘機器人采摘過程及運輸進行了研究,模擬了西瓜采摘機器人采摘過程。韓國的生菜采摘機器人[3]。
我國由于人力資源豐富,采摘工作主要還是人力,相對國外采摘機器人比較落后。隨著老齡化加劇,我國對農業采摘機器人及其理論研究越來越重視,浙江大學工程學院[4]對農業機器人開放式結構控制系統進行研究,設計了二自由度運動平臺控制。浙江工業大學陳剛[5]提出一種基于氣動彎曲關節機器人,通過控制氣壓缸來控制手指的彎曲,用于抓取水果。華南農業大學研究了一種通過驅動和路由機制實現虛擬環境下采摘機器人的運動和采摘行為的仿真系統。
文中立足于贛南豐富的臍橙產業基地,對臍橙采摘工況進行了調研,基于這類采摘工況,設計了臍橙采摘虛擬機器人,對臍橙采摘機器人的運動學進行分析。
1 臍橙采摘機器人的運動學分析
1.1 D-H 方法簡介
Denavit-Hartenberg(D-H)[6]是一種經典的研究機器人運動學的方法,通過建立與機器人各桿件固定連接坐標系遞推求解機器人執行機構末端位置。文中運用D-H 方法建立臍橙采摘機器人的運動學方程,對其運動軌跡進行推導,所設計的臍橙采摘機器人由兩個轉動關節和一個移動關節組成的三自由度機器人。
對于三自由度機器人可以用以下步驟建立與各桿i(i = 0,1,…,n)固聯坐標系oi-xiyizi。選擇關節i+1 的軸線方向為zi軸方向,當關節i +1 為移動副時,選擇zi軸與zi+1相交,在機器人桿n 執行末端沒有關節時,選擇zn軸與zn-1軸重合。各坐標系原點選擇在zi-1軸與zi軸的公法線上。各坐標系x 軸沿著過zi-1軸和zi軸的公法線方向,由zi-1軸指向zi軸,當zi-1軸與zi軸重合時,xi軸與xi-1軸重合;當zi-1軸與zi軸相交且不重合時,xi方向為zi-1×zi方向。yi方向為zi×xi方向,構成右手坐標系。
在D-H 方法中建立起各桿件坐標系后,系i-1與系i 之間的相對位置可以用以下4 個參數表示:
(1)桿長ai為zi-1軸到zi軸的距離,正方向為xi軸指向。
(2)桿扭轉角αi為zi-1軸到zi軸轉角,αi∈[-π,π]。
(3)關節距離di為從xi-1軸到xi軸的距離,沿zi-1軸的指向。
(4)關節轉角θi為xi-1軸到xi軸的轉角,θi∈(-π,π]。
其固聯關節坐標系如圖1所示。
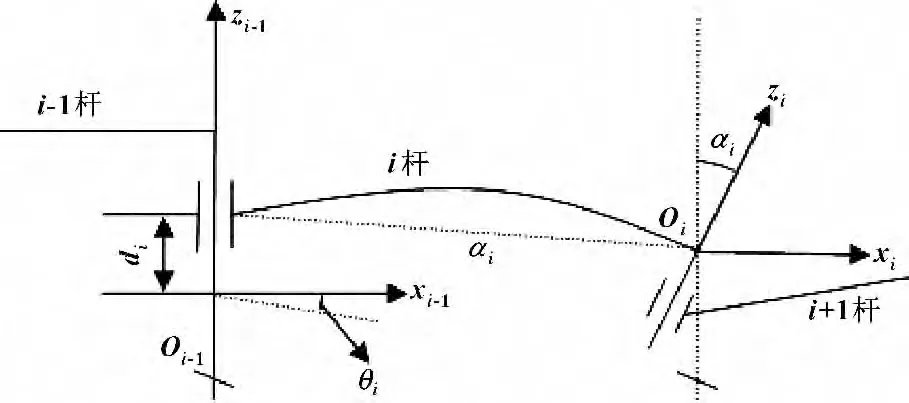
圖1 固聯關節坐標系
在用D-H 參數確定坐標系間的齊次變換矩陣,通常是按如下的步驟求解其齊次變換矩陣元素。第一步沿zi-1軸移動di長度;第二步繞zi-1軸轉動θi角度;第三步沿xi軸移動ai距離;第四步繞xi軸轉動αi角度,得到通用的齊次變換矩陣:
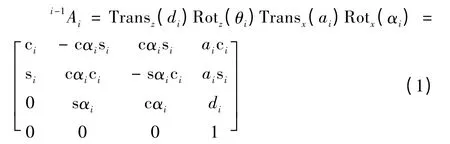
其中,ci=cosθi,si=sinθi,cαi=cosαi,sαi=sinαi。
1.2 臍橙采摘機器人運動學分析
所設計的平面三自由度臍橙采摘機器人結構如圖2所示,根據以上所介紹的D-H 方法,在各個桿件上建立固聯坐標系如圖2所示。三自由度臍橙采摘機器人由3 個關節構成,整個機器人安裝在輪式底座上,關節1 處為轉動副,關節2 處也為轉動副,梁轉動副軸線相互垂直,關節3 處為移動副,移動副軸線與關節2 處軸線重合。其D-H 參數如表1所示。
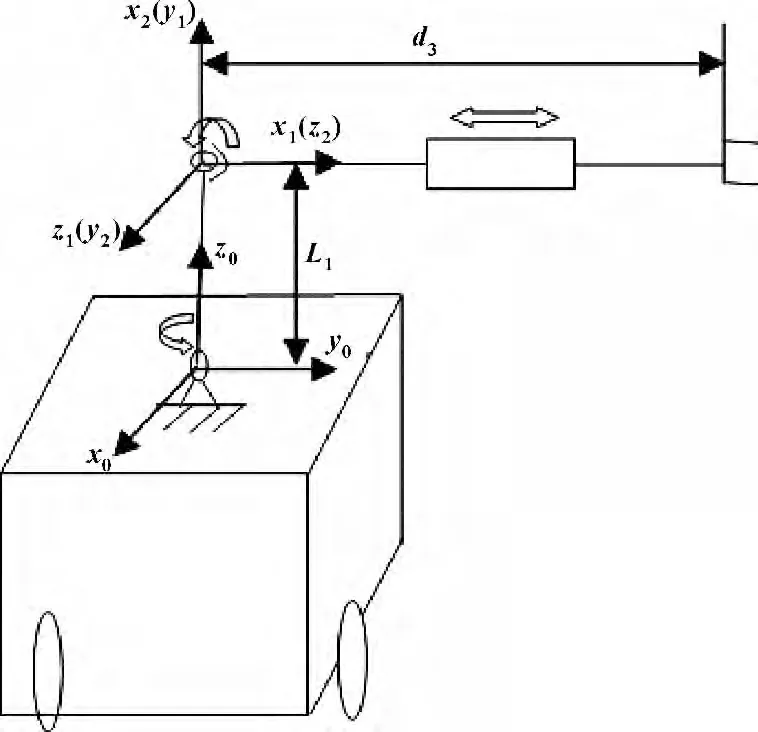
圖2 三自由度臍橙采摘機器人結構示意圖
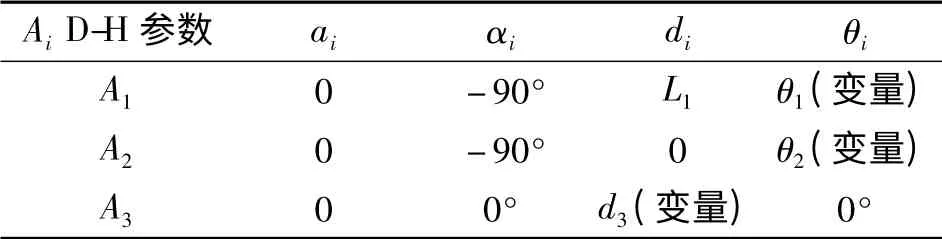
表1 三自由度臍橙采摘機器人D-H 參數
根據以上分析的D-H 參數意義,由式(1)得到關節1,2,3 的齊次變換矩陣為:

根據坐標變換定義,三自由度臍橙采摘機器人的執行末端從相對坐標系變換到絕對坐標系的整體齊次變換矩陣為:

將式(2)代入式(3)得到:
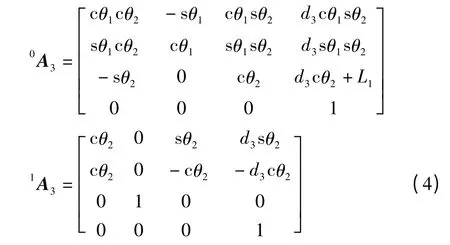
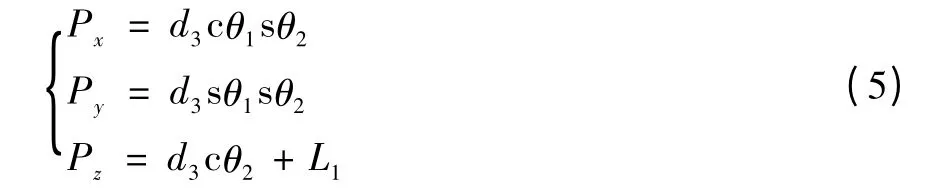
從齊次變換矩陣中得到三自由度臍橙采摘機器人執行末端的位移為:
1.3 雅克比矩陣求解
雅克比矩陣是J(q)是關節空間向操作空間速度傳遞的廣義傳動比,也是關節空間的微分運動向操作空間微分運動之間的轉換比。因此,對三自由度臍橙采摘機器人運動學分析必須對雅克比矩陣進行求解。
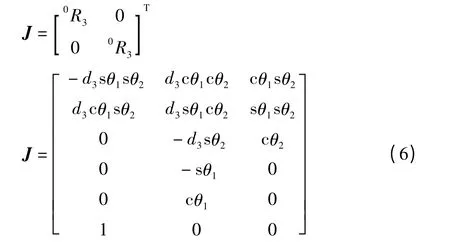
雅克比矩陣求解的方法很多:偏微分法、矢量積法以及微分變換方法。文中基于以上分析的變換矩陣,采用微分變換的方法求解三自由度臍橙采摘機器人的雅克比矩陣。三自由度臍橙采摘機器人有3 個關節,因此,雅克比矩陣J(q)為6 ×3 階矩陣。
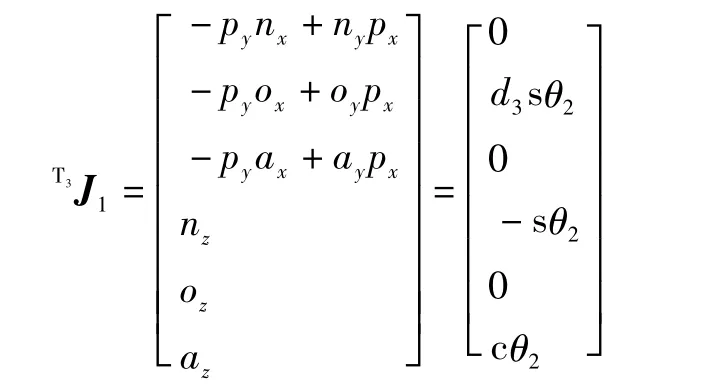
第一個關節為轉動關節,由式(4)中的0A3得到T3J1:
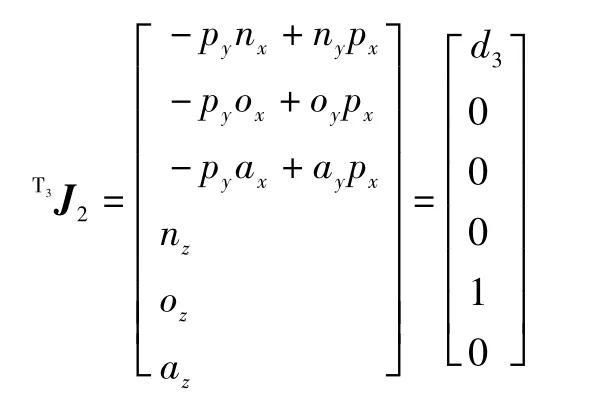
第二個關節也為轉動關節,由式(4)中的1A3得到T3J2:
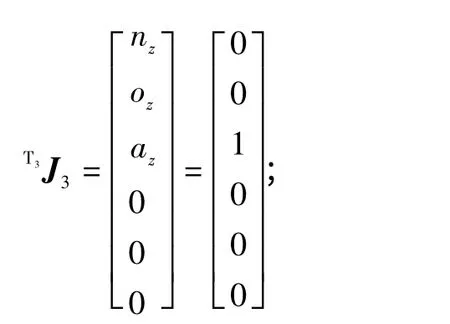
第三個關節為移動關節,由式(2)中的2A3得到T3J3:
2 臍橙采摘機器人的運動學模擬
通過對贛南臍橙園的調研,以及三自由度采摘機器人自身的約束限制,取虛擬樣機的結構及運動仿真參數如表2所示。
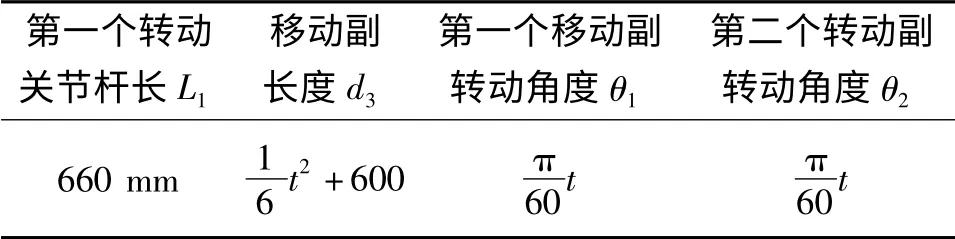
表2 結構及運動仿真參數
應用Matlab 仿真軟件對該三自由度臍橙采摘機器人的運動學正解進行仿真,得到其運動學中執行末端的位移和速度的函數變化圖像,位移圖像如圖3所示,速度圖像如圖4所示。
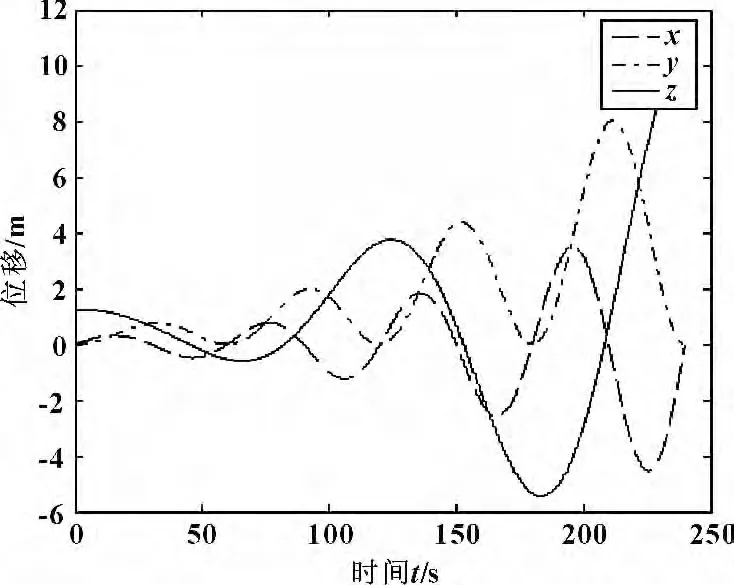
圖3 位移曲線圖
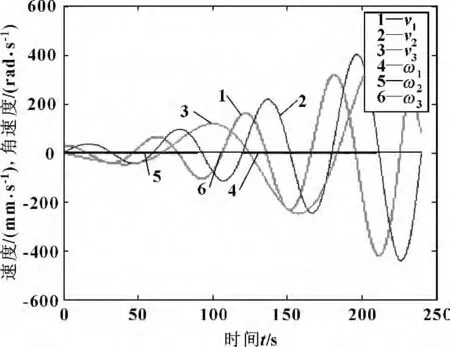
圖4 速度曲線圖
由于線速度和角速度在數值上相差很大,因此在圖4 中,三條角速度曲線近似重合,為了區分三條角速度曲線,重新對角速度進行求解計算,得到三條角速度曲線圖如圖5、圖6、圖7所示。
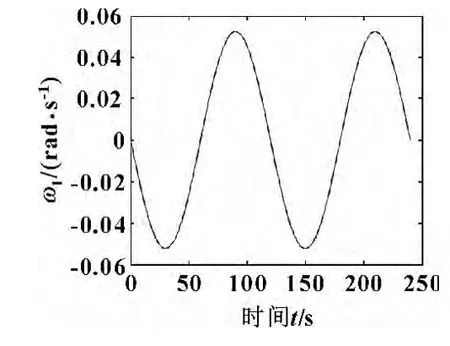
圖5 繞x 軸角速度ω1 曲線圖
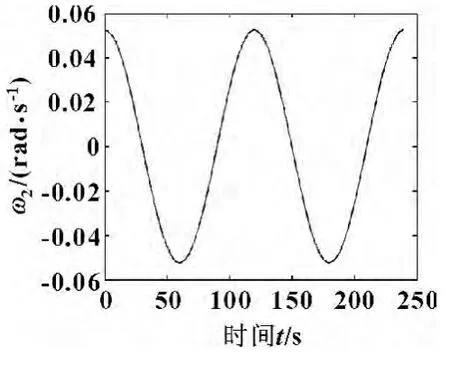
圖6 繞y 軸角速度ω2 曲線圖
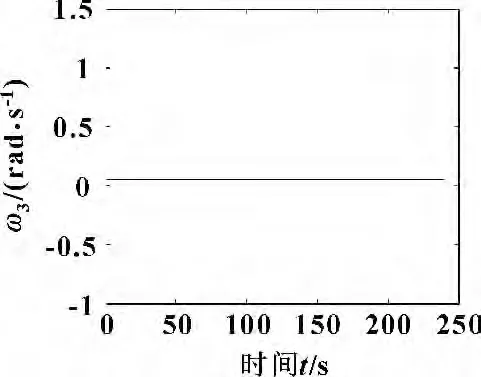
圖7 繞z 軸角速度ω3 曲線圖
通過圖5、圖6、圖7 與圖4 的比較得到,其3個方向的轉動角速度非常小,相對于移動線速度忽略不計,所研究的臍橙采摘機器人主要是移動運動。
3 結論
通過對三自由度臍橙采摘機器人位姿及運動學進行了研究。采用D-H 方法分析了三自由度臍橙采摘機器人從基坐標系到執行末端相對坐標系的變化矩陣,得到三自由度臍橙采摘機器人執行末端位移。采用微分變換的方法,求解得到三自由度臍橙采摘機器人關節與執行末端雅克比矩陣,基于雅克比矩陣得到執行末端線速度和角速度。文中對三自由度臍橙采摘機器人運動學的研究為其虛擬樣機的設計提供了理論依據,同時為其控制系統設計提供了理論參考值。
[1]HENTEN E J Van,HEMMING J,TUIJL B A J Van,et al.An Autonomous Robot for Harvesting Cumbers in Greenhouses[J].Autonomous Robots,2002,13(3):241-258.
[2]SAKIA Statoru,LIDA Machisa,OSUKA Koichi,et al.Design and Control of a Heavy Material Handing Manipulator for Agricultural Robots[J].Autonomous Robots,2008,25(3):189-204.
[3]CHO SI,CHANG S J,KIN YY A J.An Development of a Three-degree-of-freedom Robot for Harvesting Lettuce Using Machine Vision and Fuzzy Logic Control[J].Bi-systems Engineering,2002,82(2):143-149.
[4]武傳宇,胡旭東,趙勻.浙江工學院農業機器人開放式結構控制系統的研究[J].農業工程學報,2003,19(4):142-146.
[5]陳剛.新型彎曲關節及其多關節手指的控制策略研究[D].杭州:浙江工業大學,2003.
[6]DANEVIT J,HARTENBERG R S.A Kinematic Notation for Lower-pair Mechanisms Based on Matrices,Trans[J].ASME J.of Applied Mechanits,1995,22:215-221.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
