基于ANSYS的智能換電小車底盤結構靜態分析
2014-03-21 05:03:14趙慧亮趙冠浩閆愛政羅盛照
圖學學報 2014年1期
楊 勤 ,趙慧亮,趙冠浩 ,閆愛政,羅盛照
(1.貴州大學機械工程學院,貴州 貴陽 550003;2.貴陽普天物流技術股份有限公司,貴州 貴陽550008)
隨著汽車產業的高速發展,電動汽車以其能量轉換效率高、舒適清潔、噪聲低、環境友好等優點,成為汽車產業發展的潮流。電池快換系統通過對進站電動汽車進行整車電池的分箱更換,達到快速進站充電、快速出站運行的目的,有效解決了充電站面積有限和充電時間長等制約性問題和減小車輛充電時間及電動汽車在場站內的滯留現象,同時可利用夜間進行電池的集中充電,實現了電力負荷的“調峰填谷”,提高了電力設備的綜合利用效率,獲得了電動汽車廠家、電池企業和充換電運營商的普遍認可[1]。本文以智能換電小車底盤為研究對象,基于ANSYS有限元方法對其進行結構靜態分析,在充分保證工作可靠性的前提下,實現小車底盤輕量化,進而為乘用車電池快換系統的整體設計提供借鑒參考,降低成本,提高系統經濟效益[2]。
1 智能換電小車及底盤介紹
1.1 智能換電小車
智能電池快換車是乘用車電池快換系統中的關鍵設備,如圖1所示,用于對電池的裝卸和轉運,其由動力機構(圖1中A所示)、底盤、氣動舉升機構(圖1中B所示)、位置檢測裝置、輸送機構(圖1中C所示)等構成。電機驅動的動力機構為小車一端兩輪提供動力,速度由減速器進行調節,四個輪兩側的軌道下方均有定位輪,防止小車偏離軌道;氣動舉升機構由安裝于底部的氣壓泵對氣缸提供動力源,實現升降平臺升降;位置檢測裝置通過位移傳感器從沿著軌道安裝的檢測板上檢測出具體的位置信息,并反饋到控制系統來對電機和氣動控制閥進行適時控制;輸送機構用于減少電池轉移過程的摩擦。智能電池快換小車利用升降平臺(圖1中D所示)取下待沖電池,平臺下移至輸送滾柱下方,智能小車沿軌道行至垂直升降滾柱輸送機接口處,電機驅動滾柱將電池移至滾柱輸送線上,完成待沖電池卸下操作;滿荷電池安裝與此相反。
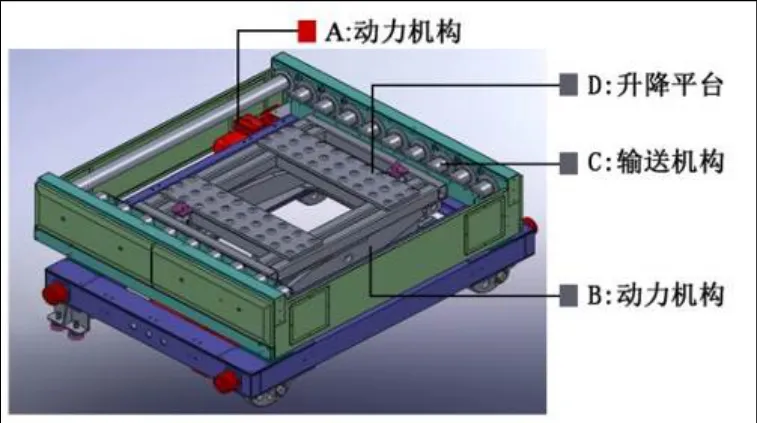
圖1 智能電池快換車
1.2 智能換電小車底盤結構介紹
智能換電小車底盤主要是智能換電小車上部操作模塊的支撐結構,如圖2所示,其結構的強度影響整體模塊的穩定性,底盤結構由熱軋普通工字鋼焊接而成,主要由對稱主梁兩組、側梁兩對、固定行動輪的固定板、上部結構安裝板組成,小車底盤上安裝驅動電機、減速器、傳動軸組成,沿軌道勻速行駛,底盤結構是智能電池快換小車的承載部件,所以底盤的各個結構都有承載作用。行動輪固定板支撐整機的重量,上部結構安裝板支撐和固定液壓舉升平臺及滾柱輸送平臺的重量。
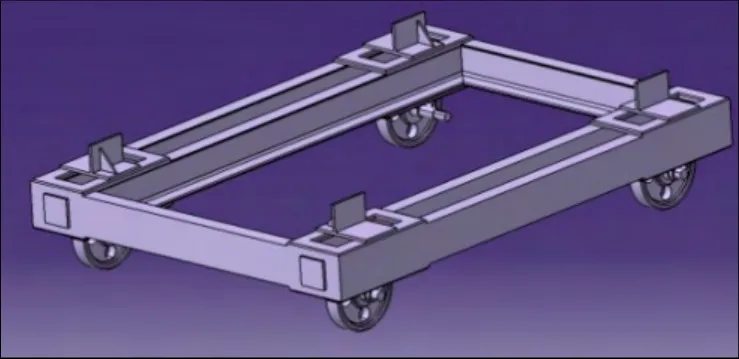
圖2 智能換電小車底盤
2 智能換電小車底盤有限元靜態分析
ANSYS 軟件是當前應用較為成熟的有限元軟件,主要包括3個部分[3]:
(1)前處理模塊:提供強大的實體建模及網格劃分工具,構造有限元模型;
(2)分析計算模塊:包括結構分析(可進行線性、非線性和高度非線性分析)、流體動力學分析、電磁場分析、聲場分析、壓電分析以及多物理場的禍合分析,模擬多種物理介質的相互作用,具有靈敏度分析及優化分析能力;
(3)后處理模塊:將計算結果以彩色等值線顯示、梯度顯示、矢量顯示、粒子流跡顯示、立體切片顯示、透明及半透明顯示(可看到結構內部)等圖形方式顯示出來,也可將計算結果以圖表、曲線形式顯示或輸出。
2.1 ANSYS的靜態分析過程
ANSYS workbench中對底盤進行靜態學分析的分為以下8個步驟[4]:
(1)導入由CAD設計軟件創建的實體幾何模型;
(2)設置材料特性;
(3)對于組件定義接觸區域(對裝配體才需要);
(4)定義網格控制并劃分網絡;
(5)施加載荷和邊界條件;
(6)設定求解結果參數。確定要解決那些物理量;
(7)對問題進行求解;
(8)進行結果評價和分析。
2.2 底盤結構模型簡化
當導入 CAD 軟件建立的幾何模型含有復雜曲面時,還需要對幾何模型進行修復,以保證能夠成功地進行網格劃分。另外,簡化底盤模型之前分清主要承載結構體,受較小力的輔助結構體,以及沒有力加載僅起到裝飾作用的結構體。
本文從以下4個方面對底盤模型進行簡化:
(1)對于與底盤結構相連接的結構,在相連接的接觸面進行固定力的加載,減掉底盤底部的行動輪部分以減少網格劃分的數量,保證計算的精確度;
(2)對于不會明顯影響底盤整體剛度、強度的底部的輪軸座安裝孔和頂部的液壓舉升平臺連接孔給予特征簡化,另外取消底盤上下支撐板上的圓角和倒角;
(3)取消底盤兩頭的緩沖墊安裝板;
(4)由于底盤為熱軋槽鋼整體焊接結構,智能電池快換小車在沿軌道行駛過程中受力較均勻,底盤結構之間沒有相互運動,在有限元分析過程不考慮焊縫的影響。底盤模型簡化后如圖3所示。
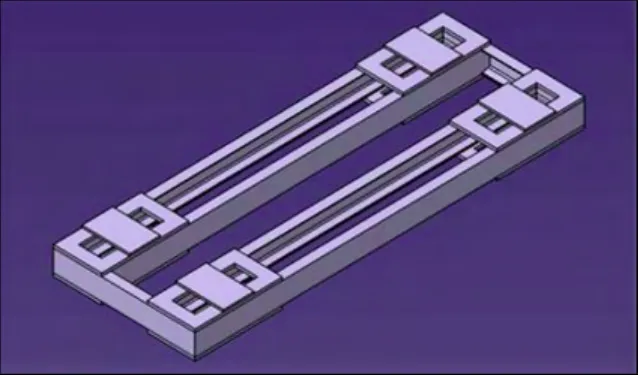
圖3 簡化后底盤模型
2.3 底盤模型導入
將通過CATIA三維軟件建立的底盤結構簡化模型,另存為.Stp格式,在ANSYS中可清晰地表達幾何邊界,實現數據無縫轉換[5-6]。模型導入到DM環境下后,在材料庫添加Q235的楊氏模量、泊松比、密度、極限強度等參數即可。底盤模型導入后,如圖4所示。
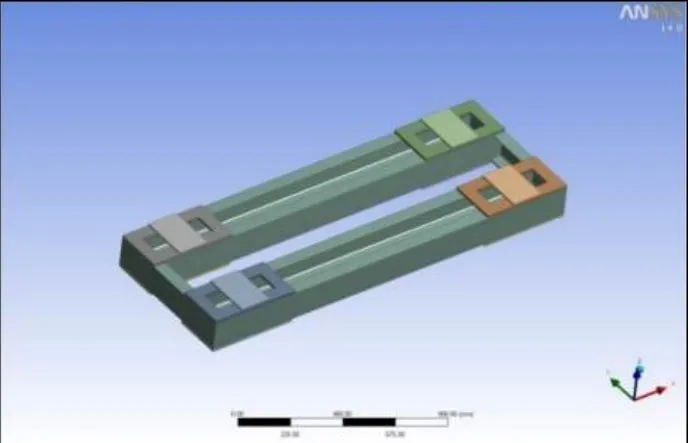
圖4 導入ANSYS底盤模型
2.4 底盤模型網格劃分
底盤工字鋼框架采用一體化建模,保證了具有焊縫銜接的工字鋼之間的網格具有公共節點,根據工字鋼焊接件網格類型為四面體和其它結構件的網格類型均為六面體,在ANSYS Workbench中對底盤模型采用自動劃分的方法進行網格劃分,調整網格單元尺寸(Element Size)數值為3mm,最終底盤裝配件模型網格劃分結果為:節點數為1500722,單元數為355783,模型網格劃分情況,如圖5所示。
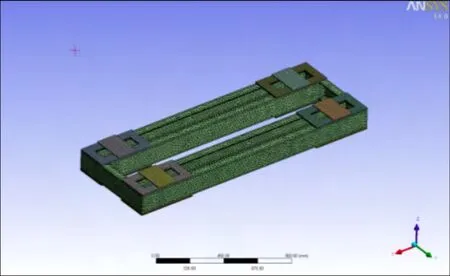
圖5 模型網格劃分
2.5 底盤載荷及約束處理
在ANSYS Workbench中對底盤結構進行約束和加載,對于底盤在運動過程為勻速,可將底盤所受的力看作恒等靜態載荷,對底盤的主要加載力來自電池自重、液壓舉升平臺自重、滾柱輸送機構自重及相應的輔助結構自重等,底盤外力的加載方向垂直向下,與行走輪對底盤的支撐輪形成一對作用力和反作用力。

其中,G電為電池總重量,約為300~600kg;G臺液壓舉升平臺結構重量,約為288.53kg;G滾為滾柱輸送機構及支撐結構的重量,約為129.53kg;G其他為其他輔助結構的重量如電機、傳動軸等,約為125kg;則重量總和為1143.06kg,為了增加結構強度和安全性,對底盤施加載荷增加到1500kg,即15000N。圖6為底盤結構受力簡圖。
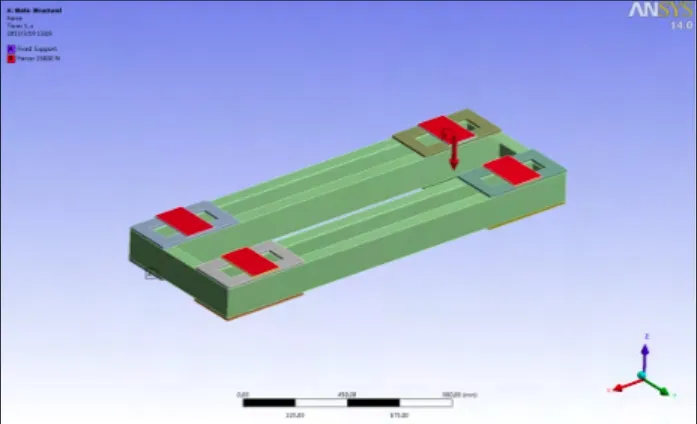
圖6 底盤施加約束和載荷模型
對底盤底部行進輪支撐的面進行約束,對4個支撐平面進行固定約束(Fixed support),施加位置如圖中藍色標記A所指;對底盤上部的支撐面施加力約束(Force),采用坐標形式進行力的矢量加載,在Z軸負方向施加15000N的力,力的加載方向和位置如圖中紅色標記B所指;底盤其他位置受力較小或不受力,其載荷約束可以省去。
2.6 不同型號工字鋼底盤結構靜態分析
在ANSYS Workbench中將上述加載好的底盤模型插入等效應力云圖(Equivalent Stress)和位移云圖(Total Deformation)進行計算,得出底盤的最大及最小等效應力分部區域和底盤結構最大最小位移變形處,查出危險位置。
(1)14a型工字鋼靜態分析
14a型工字鋼高h=140mm、厚度tw=8mm、寬度b=60mm,對14a型工字鋼進行靜態分析后,得到等效應力云圖和位移云圖的計算結果,從下圖7可以看出,14a型工字鋼最大等效應力為8.949MPa,最小等效應力為0.0003MPa,最大等效應力出現在底盤與液壓舉升平臺的支撐板位置,最小等效應力分部位置在底盤橫梁中心附近區域,大部分的應力強度均小于1.988MPa,不存在應力集中現象,而材料的屈服強度極限為235MPa,底盤不會因材料屈服而導致破壞;對受力點施加15000N驗載荷后,最大變形點出現在加載點處,根據圖中左側顏色表示可以看出底盤的最大變形量為0.018mm,變形較小。
(2)12.6型工字鋼靜態分析
12.6 型工字鋼高h=126mm、厚度tw=5.5mm、寬度b=53mm,對12.6型工字鋼進行靜態分析,得到等效應力云圖和位移云圖的計算結果,如圖8所示,12.6型工字鋼通過靜態分析后最大等效應力為15.525MPa,最大變形為0.026mm,不存在應力集中現象,結構剛度滿足材料的許用應力要求。
(3)10型工字鋼靜態分析
10型工字鋼高h=100mm、厚度tw=5.3mm、寬度b=48mm,對10型工字鋼進行靜態分析,得到等效應力云圖和位移云圖的計算結果,從圖9可以看出,10型工字鋼最大等效應力為15.768MPa,最大變形為0.031mm,不存在應力集中現象,結構剛度滿足材料的許用應力要求。
(4)8型工字鋼靜態分析
8型工字鋼高h=80mm、厚度tw=5mm、寬度b=43mm,對8型工字鋼進行靜態分析,得到等效應力云圖和總變形云圖的計算結果,從圖10可以看出,8型工字鋼最大等效應力為15.115MPa,最大變形為0.023mm,不存在應力集中現象,結構剛度滿足材料的許用應力要求。
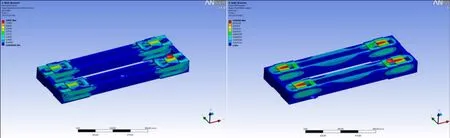
圖7 14a底盤結構等效應力云圖和底盤總變形云圖
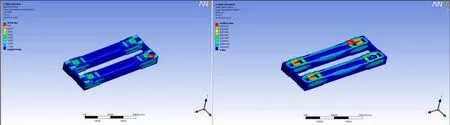
圖8 12.6型底盤等效應力云圖和底盤總變形云圖
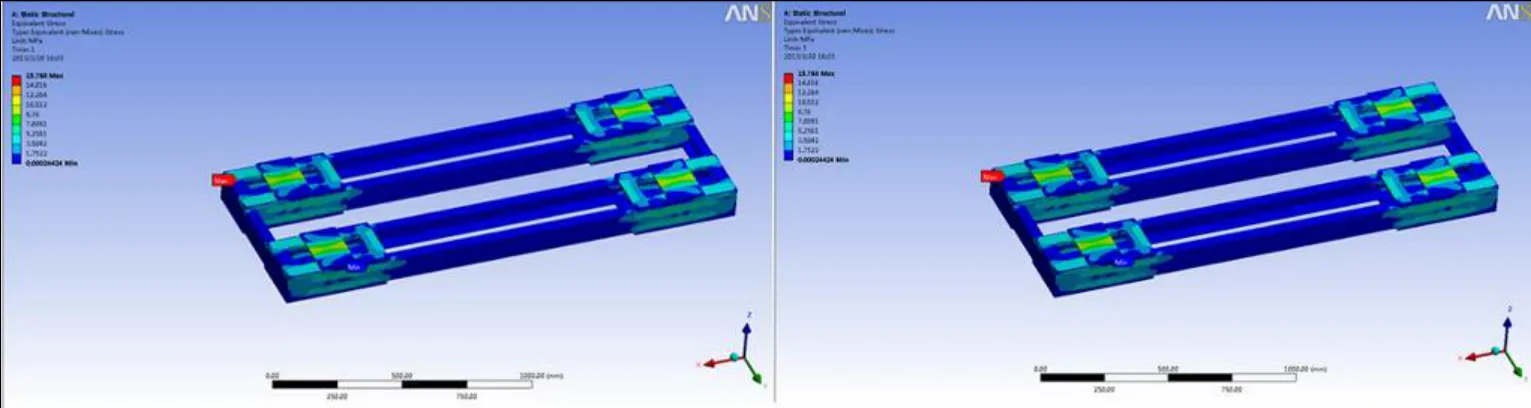
圖9 10型底盤結構等效應力云圖和底盤總變形云圖
(5)底盤結構強度校核
根據底盤等效應力云圖可以得出底盤最大應力為σmax=8.9487MPa ,Q235的材料屈服強度為σS=235MPa ,根據實際情況取安全系數S=1.5~2.0,則許用應力值則底盤的最大應力小于許用應力值即σmax<σ=118MPa,底盤的最大應力滿足強度要求;底盤其他位置的應力均小于1.998MPa,也遠遠小于材料的需用應力值,所以底盤結構采用的14a型工字鋼可以進行尺寸改進以達到結構的輕量化目標,以降低材料成本。
3 基于ANSYS的智能換電小車底盤結構尺寸改進靜態分析結果
為優選底盤結構,我們將14a型、12.6型、10型、8型工字鋼底盤在等效應力、變形、重量進行對比,如表1所示。
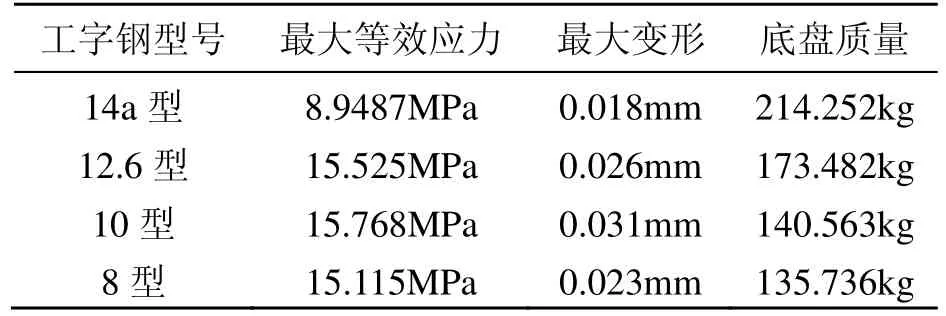
表1 工字鋼底盤等效應力、變形、重量對比
由于工字鋼的高度、寬度、壁厚等尺寸均為國標,不同型號工字鋼的結構尺寸為確定值,利用ANSYS軟件分析后,通過上表可以看出4種型號工字鋼的最大等效應力均在工字鋼材料許用應力范圍內,其中12.6型、10型、8型工字鋼最大等效應力較為接近;4種工字鋼的最大變形均較小,不作為結構改進的考慮因素;對于底盤結構的質量,根據 Q235的材料密度7.85x103kg/m3,可以計算出14a型、12.6型、10型、8型工字鋼的質量,其中14a型和12.6型質量差為4.827kg,14a型和10型的質量差為73.689kg,14a型和8型質量差為78.516kg,從三組數據的質量差可以看出,在滿足結構強度的前提下,10型和8型工字鋼的結構對質量的減輕效果較大,而10型和8型的質量差僅為4.8kg,為了增加底盤上部的液壓舉升平臺支撐板和下部行動輪安裝板的安裝尺寸,故選擇工字鋼寬度較大點的10型為底盤的結構鋼,改良后的底盤質量比之前減輕了73.689kg,材料節省率為34.39%,同時10型工字鋼通過靜態學分析后滿足結構強度要求,為智能電池快換小車的底盤模塊節省了材料。
4 結論
本文以智能換電小車底盤為研究對象,基于ANSYS有限元方法進行結構靜態學研究。研究表明該方法有利于下一步對系統的關鍵結構進行優化改進,從而使與關鍵結構相匹配的結構模塊進行相應的尺寸優化,以達到其減輕結構重量,為進行系統整體提供借鑒和保障,實現降低系統開發成本的目的。
[1]Zhao Guanhao, Yang Qin, Yan Aizheng, Zhao Huiliang,Peng Min, Luo Shengzhao.Battery quick change system equipment of passenger cars and its application mode research [J].Applied Mechanics and Materials,1957: 220-223.
[2]楊永亮.基于有限元的車床床身結構優化[D].大連:大連理工大學, 2006: 24-25.
[3]浦廣益.ANSYSWorkbench12基礎教程與實例詳解[M].北京: 中國水利水電出版社, 2011: 65-70.
[4]陸 山, 魯馮杰.基于ANSYS的整體葉盤結構優化設計[J].航空動力學報, 2012, 27(6): 1218-1220.
[5]馬 睿, 胡曉兵, 萬曉東.基于ANSYS的小型機器人小臂的有限元靜態分析[J].機械設計與制造,2012, (9): 4-5.
[6]楊 勤, 孫 傳, 祝 雨.Pro/E與AutoCAD圖形互轉技術研究[J].機械設計與制造, 2011, (8):251-253.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
