飛機下滑波束導引系統設計及仿真
2014-03-24 13:05:32曲東才謝曦鵬馮玉光
海軍航空大學學報 2014年3期
曲東才,謝曦鵬,曹 棟,馮玉光
(1.海軍航空工程學院a.控制工程系;b.兵器科學與技術系,山東煙臺264001;2.海軍裝備部,西安710089;3.海軍航空兵學院,遼寧葫蘆島125001)
無線電波束導引系統是飛機廣泛采用的制導系統,其中下滑波束導引系統是飛機在自動著陸時所采用的一種重要無線電波束導引系統。飛機在著陸前先在一定高度上作定高飛行(一般H=300~500 m),當截獲下滑波束線后,即按一定下滑坡度下滑(一般θ=-2.5°~-3.0°)。由于此時飛機仍有較大速度(不低于失速速度的1.3倍),導致其垂直下降速度H˙亦較大(約H˙=-3.5~-4.5 m/s),達不到飛機安全接地要求(一般接地瞬間的H˙=-0.5~-0.6 m/s)[1-3]。因此,飛機下滑過程中需逐漸減小θ,使其沿下滑波束中心線下滑。可見性能良好的下滑波束導引系統可使飛機按要求的著陸姿態降落,最終精確導引飛機在著陸區安全著陸。
1 下滑波束導引系統工作原理
為導引飛機正確著陸,需要設置地面無線電信標臺和由下滑耦合器、俯仰角位移控制系統等主要部件組成的下滑波束導引系統等機載無線電接收設備。
設置的地面無線電信標臺包括航向信標臺、下滑信標臺,分別為飛機提供著陸基準;同時還設置外、中、近3 個地面指點信標臺,以辨別幾個監控點,確定飛機飛越其上空時刻,并在機上用燈光和音響信號的形式給出穿過指點信標臺的信息。下滑信標臺是在縱向平面內,通過向飛機著陸方向連續發射2 個不同頻率(90、150 Hz)的高頻無線電調幅波(其載波頻率:329.3~335 MHz),進而形成下滑波束中心線(即等信號線,其仰角:2°~4°),為飛機在縱向平面內提供下滑基準[2-3]。航向信標臺則在水平面內為飛機提供水平著陸基準。
機載下滑波束導引系統原理框圖如圖1 所示[2]。當飛機沿著下滑波束中心線飛行時,由于機載接收機接收到的2個頻率信號強度相等,經解調、比幅后輸出為0;但當飛機偏離下滑波束中心線時,就會產生波束偏差角ΔΓ,并經下滑耦合器,形成角位移指令信號Δ?g,送入俯仰角位移控制系統產生Δθ,迫使飛機回到下滑波束中心線,使其沿下滑波束中心線下滑。圖1 中:Γg=0° 為給定的飛行軌跡參量,只要保證Γg=0°,飛機就沿著預定下滑波束中心線進場著陸。

圖1 下滑波束導引系統原理框圖Fig.1 Working principle of airborne slide beam guidance system
2 下滑波束導引系統設計
2.1 運動學環節
運動學環節及方程是描述飛機空間方位關系的,需建立飛機角運動量Δθ與軌跡運動參量ΔΓ之間的關系,進而構成下滑波束導引系統中的運動學環節。
設飛機沿下滑波束中心線以速度v0下滑,下滑波束中心線仰角為2.5°,飛機重心距離下滑信標臺的斜距為R。當飛機受到干擾而偏離下滑波束中心線時,其飛機重心偏離的斜距R的垂直距離為d,并規定當飛機在波束中心線上方時d>0。基于下滑運動的幾何關系,即可由R與d決定偏差角Γ。由此可獲得d˙、v0、θ滿足[2,4-6]:

對式(1)拉氏變換并進行簡單處理后可得

基于式(2),可建立運動學環節結構圖見圖2。
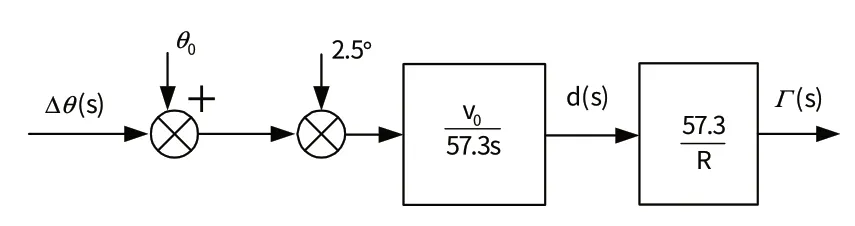
圖2 運動學環節結構圖Fig.2 Structure chart of kinematic link
2.2 下滑耦合器設計
基于上述運動學環節分析,為保證所設計的下滑波束導引系統具有良好的動態性能與穩態精度,除需合理選擇控制規律并精心設計其傳動比參數外,還要引入下滑耦合器等補償環節對其進行補償,使控制系統在接近地面時保持穩定。下滑耦合器如圖3所示[2]。
下滑耦合器簡要分析:①下滑耦合器比例+積分的形式產生俯仰角位移控制指令Δ?g,以提高波束下滑導引系統的穩態精度。其中為耦合器的比例系數,為積分常數;②在耦合器中接入相位超前網絡G(s),以改善導引系統的動特性,

其零點s=-ωg1用來補償俯仰角位移系統傳遞函數中最靠近坐標原點的極點;③通常耦合器應采取調參措施。

圖3 下滑耦合器結構圖Fig.3 Structure chart of slide coupler
2.3 下滑波束導引系統結構圖的建立
基于以上分析和圖1 下滑波束導引系統原理框圖,可設計其下滑波束導引系統結構圖見圖4[2,7-9]。圖4 中采用近似飛機短周期傳遞函數,并考慮垂風擾動及常值干擾力矩的作用。

圖4 下滑波束導引系統結構圖Fig.4 Structure chart of glide beam guidance system
3 仿真研究
3.1 仿真模型

圖5 下滑波束導引系統仿真模型Fig.5 Simulation model of glide beam guidance system
基于圖4,在Matlab 平臺下,可建立相應的Simulink 仿真模型,如圖5 所示[7-8]。在圖5 中,由“pi”環節實現下滑耦合器的比例+積分形式,由“G(s)”環節實現相位超前網絡G(s),由環節“R”實現動態斜距R,其他同比例式自動駕駛儀控制規律設計[10-13]。
3.2 仿真分析
被控對象:某著陸狀態下的噴氣式運輸機。飛行速度為v0=85.0 m/s,其短周期近似傳遞函數:
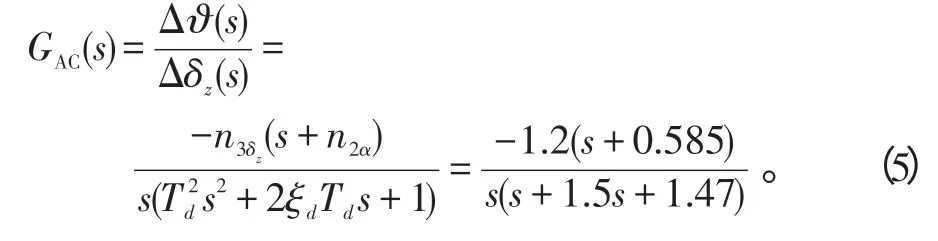
仿真初始值:舵回路時間常數0.1 s,航跡傾斜角θ0=-2.5°,斜距R=10 400 m,下滑線仰角2.5°;常值干擾力矩導致的干擾舵偏角Δδzr=0.15°,垂風干擾導致的干擾迎角Δαw=2.0°。通過仿真,獲得在Γg=0°和Γg=1°兩種情況下的仿真曲線如圖6、7所示。
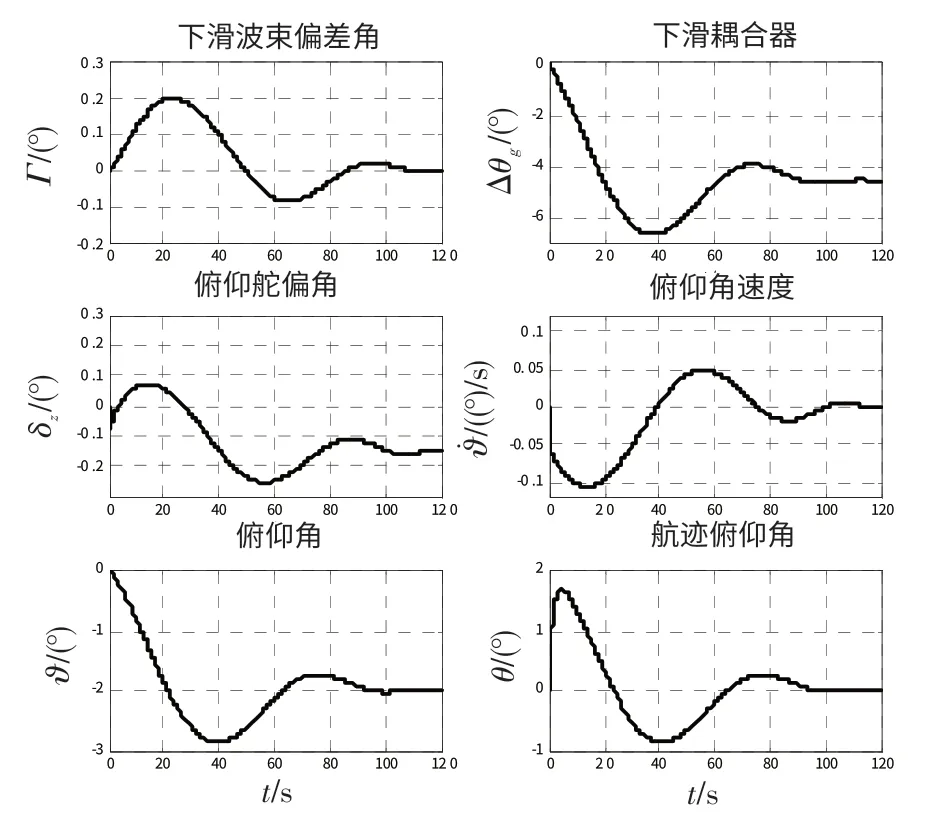
圖6 下滑波束導引系統仿真曲線(Γg=0°)Fig.6 Simulation curve(Γg=0°)of slide beam guidance system

圖7 下滑波束導引系統仿真曲線(Γg=1°)Fig.7 Simulation curve(Γg=1°)of slide beam guidance system
由仿真曲線可得:①在2 種典型干擾作用下,下滑波束偏差角Γ信號很好的跟蹤了給定的指令Γg信號。Γ在100 s 后基本達到穩定,并具較高穩態精度;同時δz、?、?˙、θ等信號也逐漸趨于穩定狀態,但系統在跟蹤給定指令Γg=1°信號時,顯然比Γg=0°的舵偏角δz要付出更大能量,其劇烈程度也更大;②通過合理設置下滑耦合器pi 控制器參數及相位超前網絡G(s),使耦合器所提供的零點近似補償了原點處一個極點1/s的作用,同時G(s)所提供的零點s=-0.5 也近似補償控制系統的一個1/s=-0.5 的極點,使控制系統趨穩定,并增大了系統的穩定裕度。
4 結論
本文在簡要分析下滑波束導引系統工作原理基礎上,建立飛機下滑波束導引系統結構圖,并在MATLAB 平臺下,仿真選取下滑耦合器參數、角位移控制系統傳動比。通過仿真曲線可見,所設計的下滑耦合器等參數是合適的,其下滑波束導引系統結構是合理的。需要注意的是:對于飛機的運動學環節,若飛機原始速度向量精準對準下滑線,即θ0=-2.5°的情況下,Δθ將以積分形式使Γ角越來越大,這意味著隨飛機接近地面,積分速率v0/R趨于無窮大,導引系統必將發散(實際上這也是各種導引系統的一般規律)。為改善控制系統的穩定性,因而需要精心設計下滑耦合器參數;同時對于運動學環節中的斜距R,在飛機下滑著陸的動態過程中是以R=R0-v0t變化的,而不能作為常數而“凍結”;pi控制器參數應可隨R自動調節,以便保持開環增益在下滑過程中基本不變。
[1] BRIAN L S,FRANK L L.Aircraft control and simulation[M]. Hoboken,New Jersey:John Wiley & Sons. Inc.,1992:109-114.
[2] 張明廉. 飛行控制系統[M]. 北京:國防工業出版社,1984:268-282.
ZHANG MINGLIAN. Flight control system[M]. Beijing:National Defense Industry Press,1984:268-282(in Chinese)
[3] 文傳源.現代飛行控制[M].北京:北京航空航天大學出版社,2004:143-196.
WEN CHUANYUAN.Modern flight control[M].Beijing:Beihang University Press,2004:143-196.(in Chinese)
[4] CHRISTOPHER FIELDING,et al. Advanced techniques for clearance of flight control laws[M]. Berlin:Sprinter,2002:180-205.
[5] NIEWOEHNER R J,KAMINER I.Design of an autoland controller for an F-14 aircraft using H-infinity control[J].Journal of Guidance,Control and Dynamics,1996,19(3):656-663.
[6] SHYH PYING S,AGARWAL R K. Design of automatic landing systems using mixed H2/H∞control[J]. Journal of Guidance,Control and Dynamics,1999,22(1):103-114.
[7] 高冰,李鵬,張學,等.基于自適應模糊控制的飛機自動著陸系統[J].電氣傳動,2011,41(8):24-27.
GAO BING,LI PENG,ZHANG XUE,et al.Airplane automatic landing system based on adaptive fuzzy conrtol[J].Electric Drive,2011,41(8):24-27.(in Chinese)
[8] 袁鎖中,陶德桂.自動著陸系統μ綜合控制研究[J].南京航空航天大學學報,2003,35(2):184-188.
YUAN SUOZHONG,TAO DEGUI. μ synthesis control in automatic landing system[J]. Journal of Nanjing University of Aeronautics &Astronautics,2003,35(2):184-188.(in Chinese)
[9] 劉冰,艾劍良.基于LQG/LTR方法的飛機自動著陸系統設計[J].動力學與控制學報,2010,8(1):92-96.
LIU BING,AI JIANLIANG. Design of an aircraft autolanding system based on the LQG/LTR method[J]. Journal of Dynamicsand Control,2010,8(1):92-96.(in Chinese)
[10]蘇希爾·古普塔.控制系統基礎[M].北京:機械工業出版社,2004:248-291.
SUDHIR GUPTA. Elements of control systems[M]. Beijing:China Machine Press,2004:248-291.
[11]侯博涵.航空飛行自動控制系統性能分析[J].現代電子技術,2003,26(9):38-39.
HOU BOHAN.Performance analysis of aviation flight automatic control system[J]. Modern Electronics Technique,2003,26(9):38-39.(in Chinese)
[12]程繼紅,曲東才.某型飛機角位移自動駕駛儀比例式控制規律設計與仿真[J].海軍航空工程學院學報,2011,26(3):241-245.
CHENG JIHONG,QU DONGCAI. Design and simulation of the proportional control law for aircraft angular displacement autopilot[J]. Journal of Naval Aeronautical and Astronautical University,2011,26(3):241-245.(in Chinese)
[13]趙廣元.Matlab與控制系統仿真實踐[M].北京:北京航空航天大學出版社,2009:199-203.
ZHAO GUAGNYUAN. Emulation study of Matlab and control system[M]. Beijing:Beihang University Press,2009:199-203.(in Chinese)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
裝備制造技術(2019年12期)2019-12-25 03:06:46
當代陜西(2019年11期)2019-06-24 03:40:28
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
