機載雷達目標跟蹤與航跡信息提取
2014-03-24 02:38:32程繼紅
海軍航空大學學報 2014年3期
蘭 天,程繼紅
(1.海軍裝備部西安軍事代表局,太原030006;2.海軍航空工程學院科研部,山東煙臺264001)
機載雷達航跡信息提取是當前信息化綜合作戰、傳感器組網作戰和多平臺一體化聯合作戰的重要研究課題[1]。在對這一問題的研究中,航跡信息提取的關鍵在于如何實現目標的精確跟蹤。針對這一情況,文獻[2]基于幾何學的原理設計了多傳感器目標協同跟蹤模型,并通過對目標速度精度的分析,有效提高了遠距離目標跟蹤的精度;文獻[3]依據自動特征尺度提取理論,通過目標特征點尺度的變化對目標的跟蹤精度做出了進一步的提高;文獻[4]借助隨機集理論,不僅在一定程度上避免了數據關聯步驟的困擾,還使目標數未知的多目標跟蹤精度得到了有效的提高。然而上述文獻的研究并沒有對多目標情況下目標機動[5]時的情況加以充分考慮。在現代戰場環境下,目標數目并不單一、且不可能始終以編隊直線的方式運動。因此,復雜多變的目標運動軌跡不可避免地會對目標跟蹤帶來較大的影響,進而嚴重干擾目標航跡信息的提取。
本文提出一種ECEF坐標系下基于交互多模型的多機協同跟蹤算法。通過對ECEF坐標系下多目標跟蹤模型的協同交互,目標機動時的跟蹤精度和航跡信息提取精度得到了有效的提高。
1 機載雷達目標跟蹤
1.1 跟蹤坐標系的選取
機載雷達的初始量測數據是在載體坐標系下得到的,具體包括載體坐標系下的距離、方位角、俯仰角和徑向速度等。而機載雷達的跟蹤坐標系一般選用大地直角(ECEF)坐標系[6-7],因而在對目標跟蹤濾波前,要將載體坐標系下的量測數據轉換到跟蹤坐標系,其坐標轉換示意圖如圖1所示。

圖1 機載雷達目標跟蹤坐標系轉換示意圖Fig.1 Coordinate system change schematic diagram of airborne radar target tracking
1.2 ECEF坐標系下的目標量測
假設機載雷達的量測為距離r(k)、方位角θ(k)和俯仰角ε(k)。那么,載體坐標系下的測量方程為
式中:vr(k)、vθ(k)和vε(k)分別為具有0 均值、恒定方差的高斯量測噪聲。
為有效實現對目標的精確跟蹤,NED坐標系[8-9]下的目標無偏轉換量測為
式中:λθ=λφ=。
進而ECEF坐標系下的目標量測為

式中:M(k)表示NED坐標到ECEF坐標的旋轉矩陣;ZO(k)為ECEF坐標系下機載雷達的位置量測。
1.3 交互多模型目標跟蹤
在獲得目標量測模型的基礎上,擬采用交互多模型[10-12]的方法來實現對目標的精確跟蹤,其具體步驟如下。
步驟1:狀態估計的交互。
假設共有N個濾波器模型,且對于第j個模型濾波器,計算其混合的目標狀態估計X0j(k|k)和混合的協方差矩陣P0j(k|k):
式(4)、(5)中:

其中,pij為從模型i 到模型j的轉移概率。
[13]胡志丁、曹原、劉玉立、葛岳靜:《我國政治地理學研究的新發展:地緣環境探索》,《人文地理》2013年第5期。
步驟2:條件模型更新。
式(8)~(14)中:Xj(k+1|k)是在模型j 下的預測狀態估計;相應的預測協方差矩陣為Pj(k+1|k);vj(k+1)是新息;Sj(k+1)是新息協方差矩陣;Kj(k+1)是濾波增益;Xj(k+1|k+1)是在模型Mj(k+1)下的狀態更新估計;P(k+1|k+1)是得到更新的協方差矩陣。
步驟3:各模型的似然函數的計算。
步驟4:模型概率更新。
模型j的概率更新計算為

式中,歸一化因子

1.4 航跡融合
在獲得各載機對目標狀態估計的基礎上,假設不同機載雷達對目標的狀態估計和協方差分別為、P1(k|k)和P2(k|k),那么融合后的結果為

式中,

2 機載雷達航跡信息提取
由于各種測量噪聲以及飛機自身運動噪聲的影響,機載雷達測量對目標狀態的估計值通常起伏很大。針對這一情況,擬采用2次濾波的技術來實現目標航跡信息的提取,其具體步驟如下。
1)從當前時刻開始往前取N個測量值(N為奇數,根據需要可以取3、5、7、9等)。
2)對這N個測量值按從小到大的順序進行排序。
3)取排序后的第(N+1) 2個數值(大小位于中間的值)作為估計值。
在第N次測量之前,所有測量值按奇次測量時刻和偶次測量時刻分別采用如下方法處理。
①對奇數測量時刻,則按上述方法取中值作為估計值。
②對偶數測量時刻,取不出中值,此時取中間兩個值的平均值作為估計值。
3 仿真分析與結論
假設3 部機載雷達對5個目標進行協同跟蹤,并以ECEF坐標系為融合中心進行數據處理。目標以編隊的形式做轉彎運動。機載雷達的測距誤差為15 m,方位和俯仰測量誤差為0.1°,跟蹤時間100 s。在上述條件下,進行了100次Monte-Carlo仿真,本文提出的基于交互多模型的航跡信息提取結果與文獻[2]所提算法的分析比較如圖2~7所示。
圖2為目標量測圖,圖3為ECEF坐標系下各機載雷達對目標的融合跟蹤誤差圖。由圖2、圖3可以看出:機載雷達對目標實現了較為穩定的融合跟蹤,跟蹤誤差可以收斂到50 m 以下,且本文所提出的ECEF坐標系下基于IMM的融合跟蹤算法相對于文獻[2]中的方法有著較好的跟蹤效果。
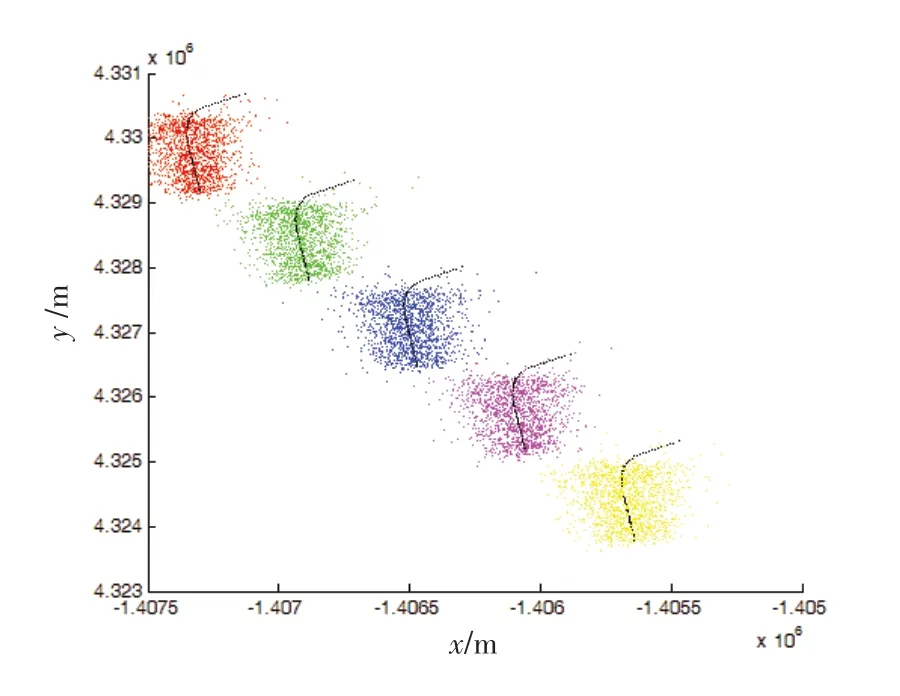
圖2 目標量測圖Fig.2 Target measurements
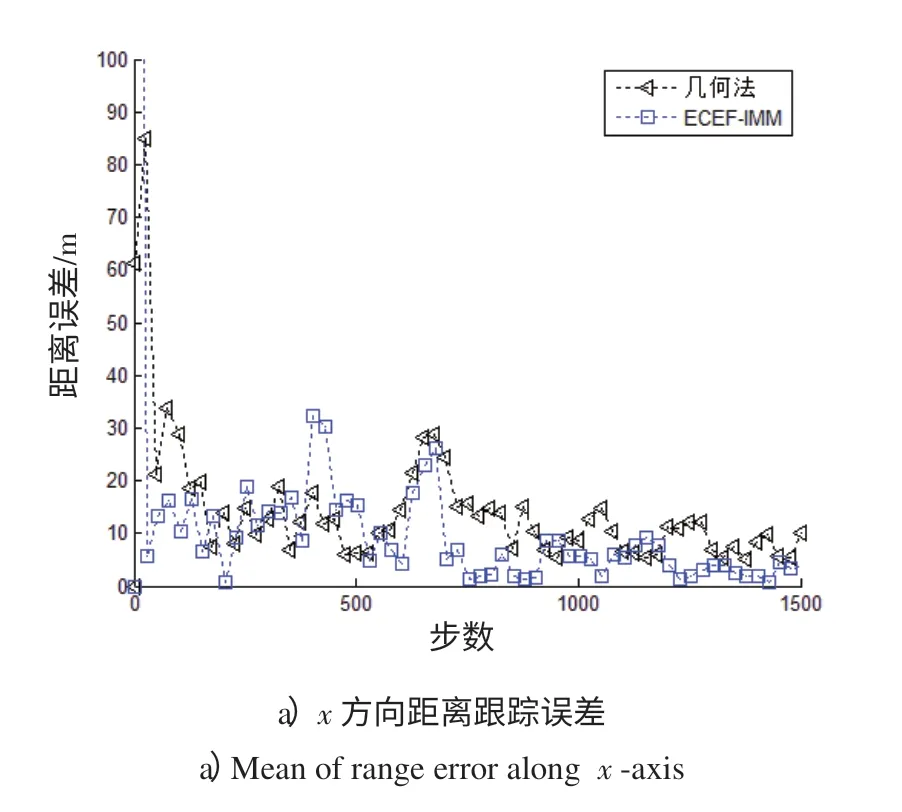

圖3 目標狀態估計均值Fig.3 Means of target state estimate errors
圖4~7分別為目標的航速信息、航向信息、角速度信息和角加速度信息提取圖。可以看出:采用本文提出的基于交互多模型的航跡信息提取算法可得到較為精確的目標航跡信息;3 部機載雷達對目標的融合航跡信息相對于各機載雷達要相對較好,且相對于文獻[2]中的方法具有更加穩定的提取結果。
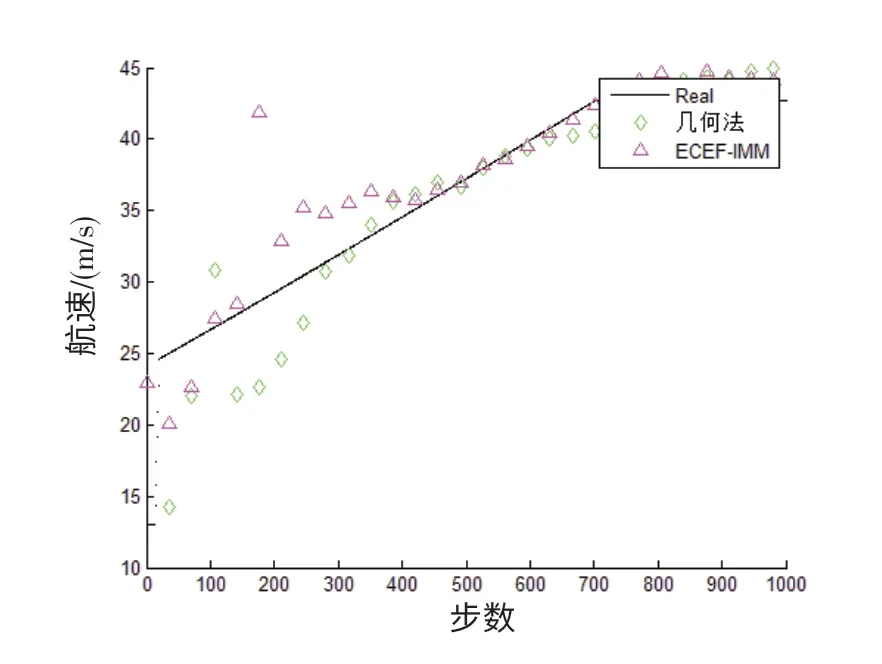
圖4 航速均方根誤差Fig.4 Velocity RMSE
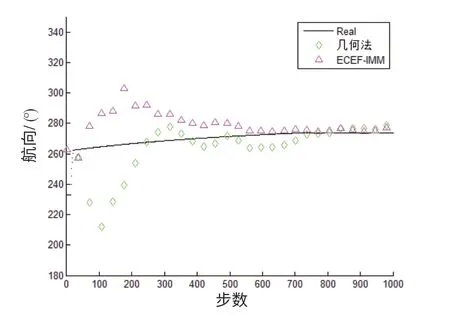
圖5 航向均方根誤差Fig.5 Course RMSE
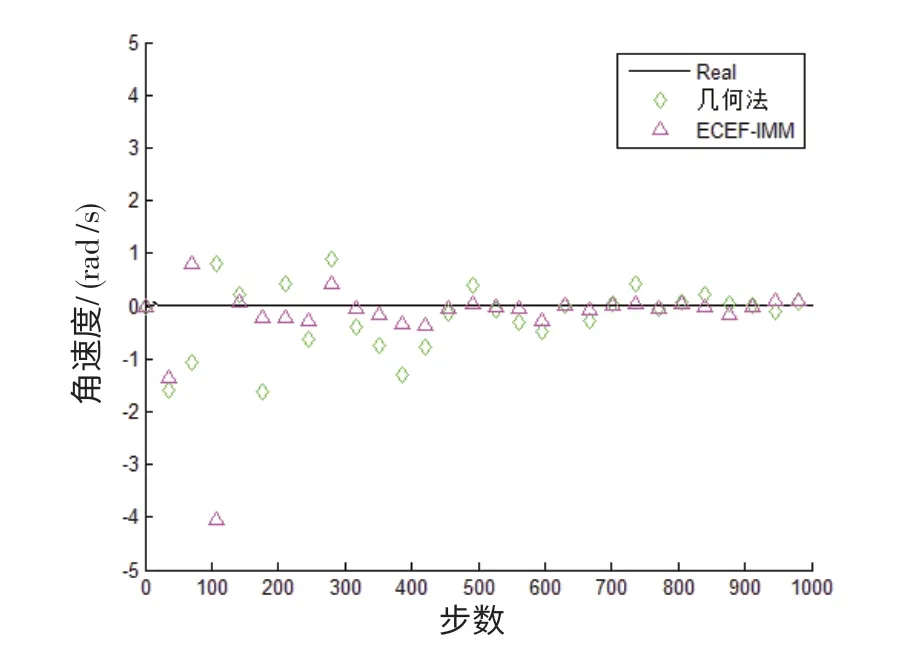
圖6 角速度均方根誤差Fig.6 Angular speed RMSE

圖7 角加速度均方根誤差Fig.7 Angular acceleration RMSE
4 結束語
本文就遠距離機動目標跟蹤的問題進行了深入的研究,提出了一種ECEF坐標系下基于交互多模型的多機協同跟蹤算法,并同單個機載雷達的跟蹤結果相比進行了仿真分析。仿真結果表明,本文所提的ECEF坐標系下基于交互多模型的多機協同跟蹤算法有著較高的目標跟蹤精度和航跡信息提取精度。因此,研究ECEF坐標系下基于交互多模型的多機協同跟蹤有著重要的意義。
[1]HE Y,WANG G H,LU D J,et al.Multisensor information fusion with applications[M].Beijing:Publishing House of Electronics Industry,2007:167-194.
[2]葉繼坤,雷虎民,薛東風,等.基于幾何關系的多彈協同跟蹤算法[J].系統工程理論與實踐,2012,32(10):2332-2334.
YE JIKUN,LEI HUMIN,XUE DONGFENG,et al.Multiple missiles cooperative tracking algorithm base on geometric relation[J].Systems Engineering Theory and Practice,2012,32(10):2332-2334.(in Chinese)
[3]董蓉,李勃,陳啟美.基于局部不變特征點數據集的目標跟蹤算法[J].儀器儀表學報,2012,33(9):2053-2055.
DONG RONG,LI BO,CHEN QIMEI.Object tracking algorithm based on dataset of local invariant feature points[J].Chinese Journal of Science Instrument,2012,33(9):2053-2055.(in Chinese)
[4]陳金廣,馬麗麗.基于隨機集理論的多目標跟蹤研究進展[J].光電工程,2012,39(10):16-18.
CHEN JINGUANG,MA LILI.Development of multi-target tracking methods based on random finite set[J].Opto-Electronic Engineering,2012,39(10):16-18.(in Chinese)
[5]劉欽,劉錚,劉俊.一種多機動目標協同跟蹤的博弈論算法[J].西安電子科技大學學報,2012,39(6):50-54.
LIU QIN,LIU ZHENG,LIU JUN.Collaborative tracking algorithm for multiple maneuvering targets based on the game theory[J].Journal of Xidian University,2012,39(6):50-54.(in Chinese)
[6]崔亞齊,熊偉,何友.基于MLR的動平臺傳感器誤差配準算法[J].航空學報,2012,33(1):118-128.
CUI YAQI,XIONG WEI,HE YOU.Mobile platform sensor registration algorithm based on MLR[J].Acta Aeronautica et Astronautica Sinica,2012,33(1):118-128.(in Chinese)
[7]CHEN L,WANG G H,JIA SY,et al.Attitude bias conversion model for mobile radar error registration[J].Journal of Navigation,2012,65(4):651-670.
[8]JENKINS K L,CASTANON D A.Information-based Adaptive Sensor Management for Sensor Networks[C]//Proceedings of American Control Conference.2011:4934-4940.
[9]THURAIAPPAH S,TAT J C,SANJEEV A,et al.A multiple hypothesis tracker for multitarget tracking with multiple simultaneous measurements[J].IEEE Journal of Selected Topics in Signal Processing,2013,7(3):448-459.
[10]彭冬亮,郭云飛,薛安克.三維高速機動目標跟蹤交互式多模型算法[J].控制理論與應用,2008,25(5):831-836.
PENG DONGLIANG,GUO YUNFEI,XUE ANKE.An interacting multiple model algorithm for a 3D high maneuvering target tracking[J].Control Theory and Applications,2008,25(5):831-836.(in Chinese)
[11]HE X F,THARMARASA R,KIRUBARAJAN T.Modified murty’s algorithm for diverse multitarget top hypothesis extraction[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(1):603-609.
[12]XU Z H,LI Y,RIZOS C,et al.Novel hybrid of LS-SVM and Kalman filter for GPS/INS integration[J].Journal of Navigation,2010,63(2):289-299.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
