基于顯著點提取的紅外弱小目標檢測
2014-03-27 02:02:38薛雅麗
云南民族大學學報(自然科學版) 2014年3期
李 莉,薛雅麗,楊 欣
(南京航空航天大學 自動化學院, 江蘇 南京 210016)
紅外弱小目標檢測與跟蹤是空間監視、早期預警、紅外精確跟蹤制導等領域涉及的一項關鍵技術.現有的紅外檢測跟蹤算法有很多,一個好的紅外檢測跟蹤算法或系統,需要有較高的正向檢測率和較低的虛警率,以及較小的計算復雜度以實現信息的實時處理[1].
視覺注意機制是人類的一項重要的心理調節機制[2].在分析復雜圖像時,視覺的信息處理方式是串行的,即采用了選擇性注意機制.選擇性表現為舍棄不突出的信息,從而更高效地處理重要信息.也就是說人們在觀察一個場景時,總是有選擇性地將注意力轉移到場景中最具吸引力的內容上,并鎖定該區域,然后通過快速的眼動掃描,將該區域轉移到更高分辨率的視網膜中央,進行更細致的分析.由此可見,選擇性注意機制在人類視覺完成復雜信息的處理任務時發揮著關鍵性的作用.近年來,國內外很多學者試圖采用計算模型來描述視覺注意機制,并希望通過以此來解決計算機視覺中的一些問題,如自動目標識別中的目標檢測.
本文將視覺注意機制用于紅外弱小目標的檢測.檢測過程分為2個階段,第1階段為快速的bottom-up模式處理階段,輸入圖像按照圖像內容分割成若干個子區域,通過分析目標的顯著性特點,計算圖像中初始視覺特征,從而快速提取各個子區域中最具顯著性的潛在目標點.在接下來的第2階段進行與任務相關的、更為細致的top-down模式目標識別過程,采用改進的雙滑窗算法進一步確認真實目標,剔除假目標,從而實現小目標檢測.
1 快速的bottom-up預注意機制
選擇性注意機制的第1階段為bottom-up預注意模式處理,即通過掃描輸入圖像,在若干空間尺度上提取出相應的圖像特征(顏色、灰度、方位),不同特征顯著性描述的線性組合則為顯著性圖.顯著性圖決定和引導注意的焦點區域[3].在紅外目標識別系統中,考慮到系統成本、運算速度等實際因素,通常使用僅提供灰度信息的單一傳感器,不考慮多傳感器的情形,因此文中僅考慮灰度特征,通過對圖像中對象的灰度顯著性分析,快速地搜索整個輸入圖像以得到感興趣的候選目標點集合.這個集合中既包含了要檢測的目標,同時也包含了一些偽目標點,且這個集合是輸入圖像的子集,它的數據量比原始數據量要小得多.
就目標檢測而言,紅外弱小目標的灰度值較周圍高,目標表現為孤立的亮斑,即目標區域與背景區域存在灰度差,但是由于紅外目標本身較小,加上背景噪聲的影響,使得這個差值較小而難以檢測,因此我們把目標放在某一個恰當小的局部區域內,在該區域內,目標具有灰度顯著性,抽取區域內灰度值最大的1個或幾個點作為候選目標點.
因此預注意模式階段處理過程可以按圖1進行.

1.1 圖像的非均勻區域分割
基于以上分析,考慮到目標灰度值在局部區域內具有顯著性,首先將輸入圖像分割成不同區域,求取所有區域內灰度值最大的一個或幾個點來獲得候選目標集合.進行區域分割時,姚訊、李德華等[4]采取等分的方式對輸入圖像進行分割,區域的大小與形狀都是一致的,實際上,分割得到的區域大小和形狀應該與該區域對象的分布相適應,對于灰度值變化平緩的區域,可將區域分割得大一些,而對于含有較多高頻信號和變化復雜的區域,分割應該更為細致一些.因此為了提高算法的效率和效果,本文創新性地采用非均勻區域分割方法,使得分割后的區域大小與形狀與該區域對象的分布趨于一致,從而更加符合實際情況.
常用的區域分割方法有2種基本形式:區域生長和分裂合并.區域生長需要人工交互以獲得種子點,種子點的選擇往往需要一定的先驗知識[5].分裂與合并方法[6]雖然對分割復雜圖像來說效果很好,但該方法的算法較復雜,不滿足實時性的要求.因此本文中采用區域合并的方法來進行區域分割,即首先用某種方法把圖像分割成許多小區域,再按照所定義的某些準則合并相鄰區域,直到再無可合并的區域塊為止.具體操作如下:
1) 將輸入圖像按水平和垂直方向分割成大小相等的區域.輸入圖像以Ω表示,將其長等分為n格,寬等分為m格,可得m×n個互不相交的區域Ωi,j,其中i=1,2,…,m;j=1,2,…,m;
2) 根據灰度統計特性對區域進行描述,如果相鄰區域的屬性值相似,例如灰度均值相似,則將該2個子區域進行合并;
3) 如果某區域不能與它周圍的所有區域合并,則被標記為終結,當所有區域終結時,合并過程結束.
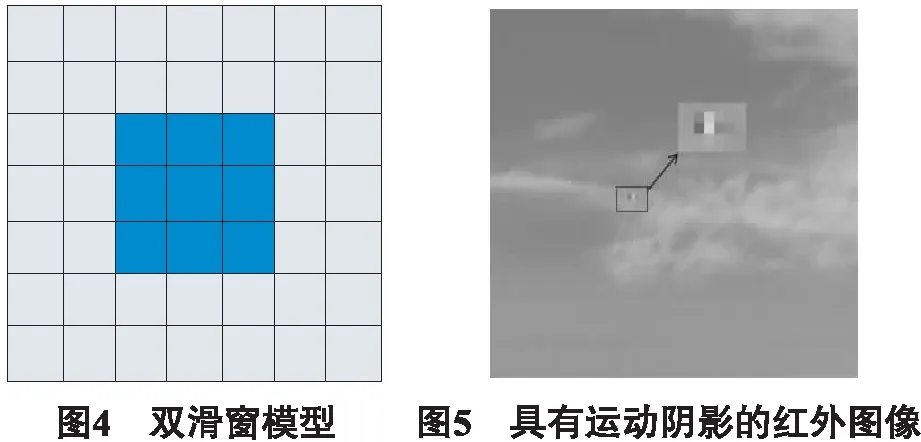
如用U(i,j)表示區域Ωi,j的灰度均值,選取閾值U,若|U(i,j)-U(i,j+1)| 圖2為2幅包含弱小目標的紅外圖像Img1、Img2及采用上述方法得到區域分割圖.其中圖像Img1的分辨率為160×160像素,將圖像等分為5×5小塊,取閾值U為0.03進行區域合并;圖像Img2的分辨率為28×128像素,將圖像等分為3×3小塊,取閾值U為0.05進行區域合并. 對于進行圖像分割時已經標記為終結的區域,可以進行該區域內顯著點的提取.從圖2中可以看出,由于分割采用的是非均勻分割方法,使得每個區域的大小和形狀都各不相同,要對區域分割得到的每個區域進行顯著點提取必須先進行區域定位.我們可以通過區域的2個顯著特點來進行區域定位: 1) 在區域分割好的圖像上,屬于同一區域的子塊具有相同的灰度均值; 2) 同一區域內子塊與子塊之間形成一個連通域. 因此,具體進行區域定位的方法如下: 1) 對U(i,j)(i=1,2,…,m;j=1,2,…,m)按從大到小進行排序,均值不同的子塊必然屬于不同的區域. 2) 對于均值相同的子塊,按照連通性的原則,判斷所有子塊是否屬于同一區域. 實現區域定位后,由于目標灰度值在區域內具有一定的顯著性,即目標灰度值應該是區域內灰度值最大的1個或幾個,且目標灰度值應該大于區域灰度均值.因此對區域內大于區域均值的所有像素點按灰度值大小排序,得到一個順序統計量,取這個順序統計量的最大的若干個,可得到每個區域內的顯著點.對于包含r個像素值的區域Ωi,j,ξi,j(k)表示Ωi,j中灰度值大于灰度均值U(i,j)的像素點,其中k=1,2,…,r.對這k個像素點進行從小到大的排序得到順序統計量ξi,j(k),即有:ξi,j(1)≤ξi,j(2)≤…≤ξi,j(k).從ξi,j(k)中抽取最大的s個即可得到區域Ωi,j中的顯著點的灰度值集合Zi,j={ξi,j(2)|m=k,k-1,…,k-s-1}. 圖3為圖像Img1、Img2進行顯著點提取(s=3)后得到的顯著點分布圖.從圖中可以看出通過bottom-up階段處理后的圖像中候選目標數比原始數據量小得多,這樣可以有效地減少算法運行的時間,從而提高了算法的執行效率. 這一階段根據具體的任務,調整選擇準則,對已經提取的候選對象進行再次識別,再次識別成功的對象則被認為是目標對象.一般來說,檢測的任務是判斷目標是否出現在某個區域內.在此階段,一些已有的空域算法和數學形態學的方法[7]可稍作修改應用于此.考慮到傳統雙滑窗算法[8]簡單,易于實現,因此本文將傳統雙滑窗算法的思想應用于top-down處理階段,并在傳統算法的基礎上稍作改動,使其對于復雜背景中的紅外小目標也能具有較好的檢測效果.在每一個候選目標點位置擴展2個大小窗口,如圖4所示,圖中小窗口可看做包含目標的區域,用表示該區域中所有的像素點的集合,Θmax表示該區域中像素的灰度最大值,Θm表示該區域所有像素的灰度均值. 大窗口區域用P表示,P中所有像素的灰度均值用Pm表示.假設當前候選目標點為真實目標,Θ為真實目標區域,由于P中包含了一部分背景,因此區域P的灰度均值Pm一般小于目標區域Θ的灰度均值Θm,由此得到傳統雙滑窗算法的原理:以像素點為中心開內、外2個窗口,內窗包含了當前像素點在內的n×n個像素,且內窗所有像素灰度均值為T1,外窗包含了當前像素在內的m×m個像素(其中m>n),且外窗所有像素灰度均值為T2,設定閾值T,判斷當前像素點是否為紅外小目標點的準則為:若T1-T2≥T,則認為該點為小目標點;反之,則認為該點屬于背景. 傳統雙滑窗算法對大部分紅外圖像均具有良好的檢測效果,但對于目標區域帶有運動陰影的紅外圖像會造成誤檢.圖5為一幅目標區域具有運動陰影的紅外圖像,圖中箭頭所指向的區域為放大的目標區域,從放大圖中可以清楚地看到在目標臨近位置有一些較暗的區域,暗區域的灰度值甚至低于其領域背景的灰度值,在這種情況下,采用傳統的雙滑窗檢測算法勢必會造成誤檢. 針對這種情況,我們對傳統雙滑窗算法進行改進,考慮到陰影的存在使得小窗口的灰度均值急劇下降,引入灰度最大值Θmax和最大值因子α(0<α<1)來削弱陰影的影響,設置內窗的灰度特征量T1=α·Θmax+(1-α)·Θm,外窗灰度特征量依然為外窗灰度均值Pm.選取灰度閾值T,對中心像素是否為小目標點的判斷準則為:若T1-T2≥T,則認為該點屬于小目標點;反之,則認為該點屬于背景點. 基于以上分析,可以得出本文紅外弱小目標算法: Step1 將輸入圖像按水平和垂直方向分割成大小相等的區域Ωi,j,用U(i,j)表示區域Ωi,j的灰度均值,其中i=1,2,…,m;j=1,2,…,m; Step2 選取閾值U,若|U(i,j)-U(i,j+1)| Step3 對非均勻分割圖進行區域定位,對各個區域大于區域均值的所有像素點按灰度值大小排序,得到一個順序統計量,取這個順序統計量的最大的s個,得到每個區域內的顯著點作為候選目標點; Step4 采用改進的雙滑窗算法對每個候選目標點進行再次識別,去除偽目標點; Step5 輸出再次識別成功的目標點位置. 實驗采用美國空軍實驗室實測紅外圖像進行仿真實驗,并列出與傳統的雙滑窗算法以及比較有代表性的基于數學形態學的Top-Hat算法的檢測結果做比較,以此來驗證本文算法的有效性.所有實驗都對運行時間進行統計以驗證算法的實時性.實驗平臺為Intel Pentium 4,1 GB內存的PC機,通過Matlab 2 009a軟件平臺完成仿真實驗. 傳統雙滑窗算法對于目標區域帶有運動陰影的紅外圖像會造成錯誤的檢測結果.對于圖5中具有運動陰影的紅外圖像,采用本文提出的方法對其進行檢測,檢測結果見圖6. 采用本文算法對圖6的檢測時耗為 0.373 581 s,而傳統的雙滑窗算法進行檢測的時耗為 2.788 641 s.由此可見本文算法在實時性與準確性上均優于傳統的雙滑窗算法. 先采用Top-Hat算法對圖像Img3~Img6進行檢測,該算法應用Top-Hat算子對背景進行預測,并將背景與原圖進行比較,通過設置閾值判別目標,檢測結果見表1. 從表1可以看出,對于紅外圖像Img3~Img6,Top-Hat算法沒有有效處理背景區域,使得在進行閾值分割時,造成了較高的虛警,這些虛警可以通過后續的幀間處理方法消除,但是會增加額外的運算開銷. 表1 Top-Hat算法與本文算法目標檢測結果對比 從檢測結果來看,對于圖像Img3~Img6采用本文算法均能實現正確檢測,而且由于本文算法無需進行背景預測,檢測耗時相比Top-Hat算法要少.綜合以上分析可知本文提出的算法魯棒性強,既適用于目標區域帶有運動陰影的紅外圖像,也適用于信噪比低的復雜紅外圖像.本文算法對于這2種紅外圖像均能實現正確檢測,且檢測所需時間也基本滿足實時性要求. 本文的研究從人類視覺感知情況出發,將視覺注意機制引入到紅外圖像弱小目標檢測應用中,提出了一個新的串行處理方法,該方法通過抽取輸入圖像的相關信息并對這些信息進行分析識別,在保持其他性能的前提下,大幅提高了運算效能. 參考文獻: [1] JESMIN F K,MOHAMMAD S A. Target detection in cluttered forward-looking infrared imagery[J].Optical Engineering, 2005, 44(7):076-404. [2] OLSHAUSEN B A, ANDERSON C H, VAN ESSEN D C. A neurobiological model of visual attention and invariant pattern recognition based on dynamic routing of information[J].The Journal of Neuroscience, 1993, 13(11) : 4700-4719. [3] ITTI L, KOCH C.A model of saliency-based visual attention for rapid scene analysis[J].Pattern Analysis and Machine Intelligence,IEEE Transactions on, 1998,20(11):12-54. [4] 姚迅, 李德華, 黃飛, 等. 基于視覺注意機制的紅外圖像小目標檢測方法[J].武漢大學學報: 工學版, 2006, 39(6):108-112. [5] 王蒙, 呂建平. 基于邊緣檢測和自動種子區域生長的圖像分割算法[J].西安郵電學院學報,2011,16(6):16-19. [6] HOROWITZ S L. Picture segmentation by a tree traversal algorithm[J].Journal of the ACM,1976, 23(2):368-388. [7] BARNETT J. Statistical analysis of median subtraction filtering with application to point target detection in infrared backgrounds[C]//International Society for Optics and Photonics.Los Angeles,1989, 1050:10-18. [8] 劉興淼, 王仕成, 趙靜,等. 基于改進雙滑窗的紅外小目標檢測算法[J].計算機應用,2011,31(5):1217-1220. [9] KITTLER J, ILLINGWORTH J, FOGLEIN J. Threshold selection based on a simple image statistic[J].Computer Vision, Graphics and Image Process, 1985,30(2):381-387. [10] 葉斌, 彭嘉雄. 基于形態學 Top-Hat 算子的小目標檢測方法[J].中國圖象圖形學報: A 輯,2002, 7(7): 638-642.
1.2 提取區域內的顯著點

2 top-down注意模式處理階段
3 算法
4 實驗與結果分析



5 結語
 猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58發明與創新·小學生(2021年3期)2021-03-25 11:48:49中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46海峽科技與產業(2016年3期)2016-05-17 04:32:12中國科技博覽(2016年2期)2016-04-25 20:32:39小學生導刊(2016年34期)2016-04-11 00:49:44
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58發明與創新·小學生(2021年3期)2021-03-25 11:48:49中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46海峽科技與產業(2016年3期)2016-05-17 04:32:12中國科技博覽(2016年2期)2016-04-25 20:32:39小學生導刊(2016年34期)2016-04-11 00:49:44