一種多關節輕量化離散驅動機械臂的設計與研究
2014-04-26 08:23:30朱曉龍頓向明山磊頓向勇
機床與液壓 2014年21期
關鍵詞:機械
朱曉龍,頓向明,山磊,頓向勇
(1.上海交通大學機器人研究所,上海 200240;2.常州遠量機器人技術有限公司,江蘇常州 213100)
0 前言
隨著空間技術的飛速發展,特別是空間站、航天飛機、空間機器人等的誕生及成功應用,空間機械臂作為在軌支持、服務的一項關鍵性技術已經進入太空,并越來越受到人們的關注[1]。
通常,空間機械臂的各個關節都由一個獨立的電機進行驅動,如日本的工程技術衛星ETS-VII[2-3]的機器人臂有6個自由度,每一個關節由無刷直流電機和諧波減速器驅動;德國宇航中心DLR研制的六自由度空間機器人系統ROTEX[4]以及兩關節機械臂ROKVISS[5]。但是,這種關節驅動方式需要的電機和減速器的數量較多,從而導致機械臂的體積和自重很大一部分來自于驅動電機及減速器,增大了發射費用和發射難度,并且降低了機械臂的驅動能力。因此,有必要采用新的結構設計理念研制出更加輕量化、更加經濟高效、更加可靠的空間機械臂。
單馬達驅動技術是一種新型的機械臂設計技術。與傳統的機械臂設計方式不同,單馬達驅動式機械臂多個關節由同一電機提供動力。這種設計方式使得電機和減速器的數量大大減少,進而使得機械臂的總質量和體積減小,結構更加緊湊。目前,已經有一些研究者對這面進行了相關研究,如加拿大的KARBASI[6]博士設計了一臺單電機兩自由度柔性機器人,并采用高速離合器進行關節調速;新加坡南洋理工大學研制的20自由度蛇形機器人[7]以及金剛機器人[8-9],采用一個馬達驅動多個串聯關節;華中科技大學的李世其教授和劉洋博士等人采用模塊化設計理念,設計出了具有扭轉、彎曲兩個關節的運動模塊,并利用該運動模塊研制出了一臺利用直流電機進行驅動的6自由度輕型機械臂XN-600-1[10];上海交通大學的馬培蓀教授[11]也研制出了一個由單電機離散驅動的7自由度蛇形柔體機械臂,電機的動力通過一種特殊的萬向節傳遞到各個關節,并利用離合器和蝸輪蝸桿傳動驅動關節動作。
作者基于單馬達驅動技術,研制了一臺5自由度的多關節輕量化離散驅動機械臂。該機械臂利用錐齒輪傳動、直齒輪傳動以及帶傳動將驅動電機的動力傳遞到各個關節及手爪,并利用離合器、蝸輪蝸桿傳動、直齒輪傳動驅動各個關節動作。該機械臂未采用模塊化設計理念[6],具有關節設計靈活、齒輪總數量少、質量輕、體積小等優點。文中首先對該機械臂的機械機構、工作原理、關節耦合特性進行了介紹,并利用ANSYS對其進行了模態分析,找出了固有頻率。然后,通過對機械臂進行運動學求解以及仿真驗證了機構的可行性。
1 機械臂總體介紹
所設計的機械臂具有5個自由度,關節類型分別為:扭轉關節—彎曲關節—彎曲關節—扭轉關節—彎曲關節。對于單電機驅動的4個關節其動力流傳輸主要分為兩個部分:一條主動力鏈,4條支路動力鏈。各個關節通過離合器從主動力鏈獲取動力,并通過減速后作為支路動力驅動各個關節,機械臂三維模型如圖1所示。
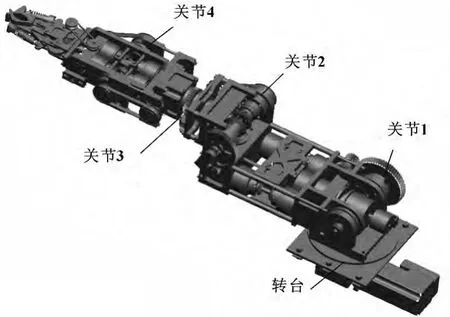
圖1 機械臂3D模型
該機械臂運動學模型與傳統機械臂類似,5個關節的角度決定了末端手爪的位姿。通過合理地運動規劃可以實現復雜的末端軌跡。
2 機械臂結構及運動特性
2.1 設計思路
傳統機械臂各個關節由各自的驅動電機獨立提供動力,關節之間相互獨立。為了減小機械臂的質量和體積,可以采用單電機驅動的方式。文中采用動力分流的設計理念實現單電機驅動,將機械臂的驅動力分為主動力鏈和關節支路動力鏈,主動力鏈將驅動電機的動力傳遞到各個關節位置,各個動力支路則利用離合器從主動力鏈獲取動力以驅動對應關節。從主動力鏈角度來說,該設計方式能夠方便地利用簡單的齒輪傳動實現,具有結構簡單、傳動精度高、組成零件少的優點;從支路動力鏈角度來說,各個關節通過離合器從主動力鏈獲取動力,能夠最大程度地減小關節動力耦合,使這種單電機驅動機械臂能夠同傳統機械臂一樣實現靈活的末端軌跡。動力流示意圖如圖2所示。
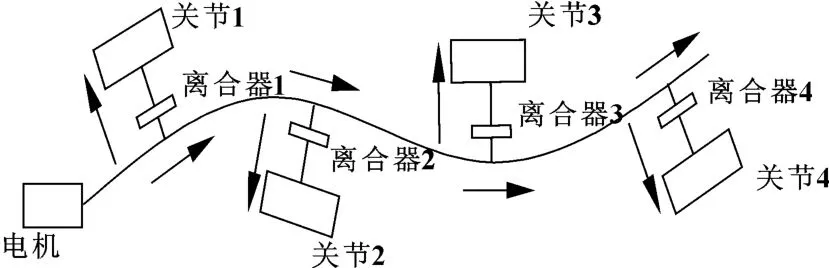
圖2 驅動力流示意圖
2.2 機械結構
對于動力主傳動鏈,其動力流由關節驅動電機流出,經過錐齒輪傳動以及帶傳動流向各個關節。而對于動力支路傳動鏈,由離合器從動力主傳動鏈獲取動力,并經過蝸輪蝸桿以及齒輪或帶輪的減速后驅動各個關節。機械臂關節1、關節2、關節3的簡化結構以及動力流傳動鏈如圖3所示,其中實線箭頭為主動力流路徑,虛線箭頭為支路動力流路徑。
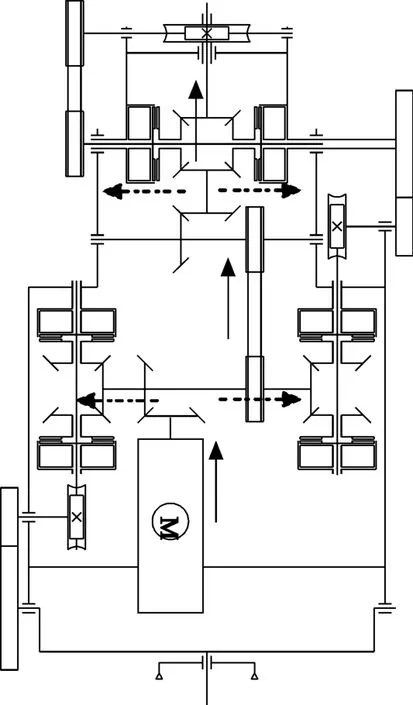
圖3 機械臂動力傳動鏈示意圖
2.3 關節驅動原理
各個關節通過由離合器、蝸輪蝸桿、帶輪和齒輪組成的動力支路從機械臂的主動力傳動鏈上獲取動力,以實現自身的運動。其中,關節一驅動原理圖如圖4所示,以其為例進行分析。
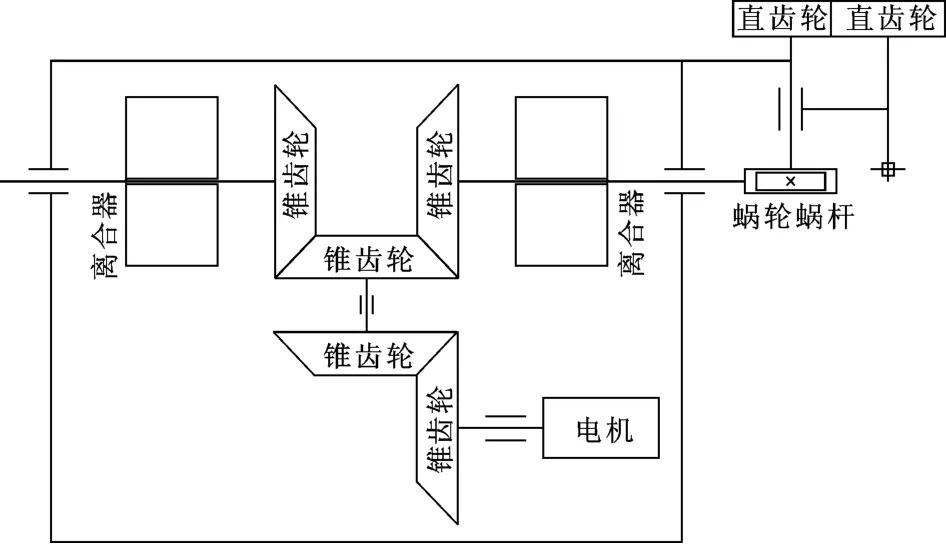
圖4 關節驅動原理圖
從圖中可以看出,電機的輸出經過兩組錐齒輪傳動傳遞到左右兩個離合器的輸入軸,兩個離合器的接合可以實現關節的正反向運動。同時,每個關節的驅動支路都有蝸輪蝸桿傳動機構,既提供了減速和放大力矩的功能,同時也能夠實現關節掉電時候的自鎖。
2.4 關節運動耦合
對于這類采用離散驅動方式的單電機機械臂,由于一般機械臂關節在傳動鏈輪系中起行星架的作用,因此主傳動鏈的速度會隨關節運動狀態的變化而發生改變,從而造成關節相互之間的運動耦合。例如,所設計機械臂的由同一電機提供動力的4個關節中,有3處存在耦合現象,對應輪系如圖5所示。
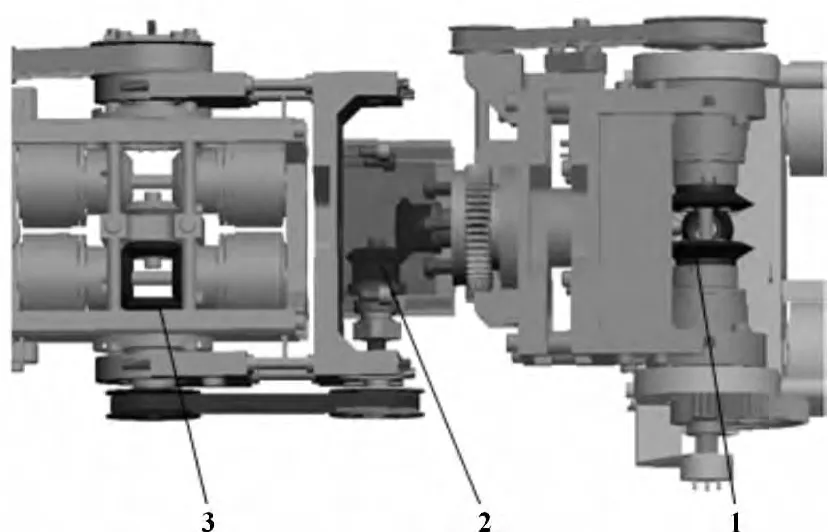
圖5 耦合關節分布
為了分析不同關節速度下主傳動鏈速度的差別,以圖5中2耦合關節為例將關節輪系進行簡化,如圖6所示。
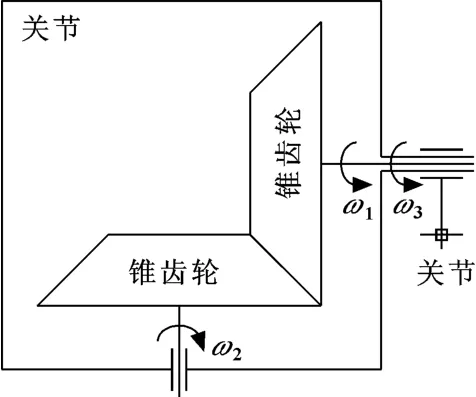
圖6 耦合特性示意圖
其中:ω1為右側齒輪相對于其所在關節的轉速;ω2為下側齒輪相對于其所在關節的轉速;ω3為下側齒輪所在關節相對于右側齒輪所在關節的關節轉速,轉速方向如圖6所示,且兩個錐齒輪齒數相同。當ω3為零時,即左側關節不運動時,兩個錐齒輪組成定軸輪系,傳動比為1∶1。當ω3不為零時,即左側關節轉動時,該輪系變為周轉輪系,利用周轉輪系傳動比的計算公式計算得出其傳動比為:

從而可以得出ω2=ω1-ω3,保持輪系輸入ω1不變,則在不同關節轉速ω3下該輪系輸出速度之差為:

其中,ω'3為變化后的關節速度。當ω3轉向相反時,Δω2=Δω3,即當存在耦合特性的關節其關節速度發生改變時,輪系輸出速度之差為Δω2=±Δω3。同理,對耦合關節1處進行分析得出Δω2=±2Δω3。
從上述分析可以看出,這類存在耦合特性的關節在不同關節轉速下輪系輸出速度之差為Δω=±kΔω0,其中k為輪系傳動比,ω0為作為行星架的關節的轉速大小。由于這種耦合特性的存在,導致當這類關節運動狀態變化時該關節后面的主傳動鏈速度發生改變,從而影響后面的關節運動。因此在多關節聯動時,需要通過實時對離合器占空比等控制量進行相應的調整,以保證其關節速度維持在期望值。
3 機械臂的模態分析
對于機械臂,其工作狀態一般為懸臂梁結構,如果在其工作過程中出現共振現象則會很大程度地影響末端手爪的運動精度,導致機械臂無法完成目標任務。因此,為了避免共振的發生,對機械臂進行了模態分析以找到其固有頻率。
為了分析機械臂的模態,采用ANSYS作為分析工具。為了使仿真能夠進行,對完整的機械臂模型進行了簡化。同時,由于機械臂處于不同的工作狀態其模態會有所不同,因此對3種典型工作狀態進行模態分析,以此得到其共振頻率大概范圍。3種工作狀態下的有限元模型如圖7(a),7(b),7(c)所示,分析結果如表1所示,每種狀態列出其前5階固有頻率。
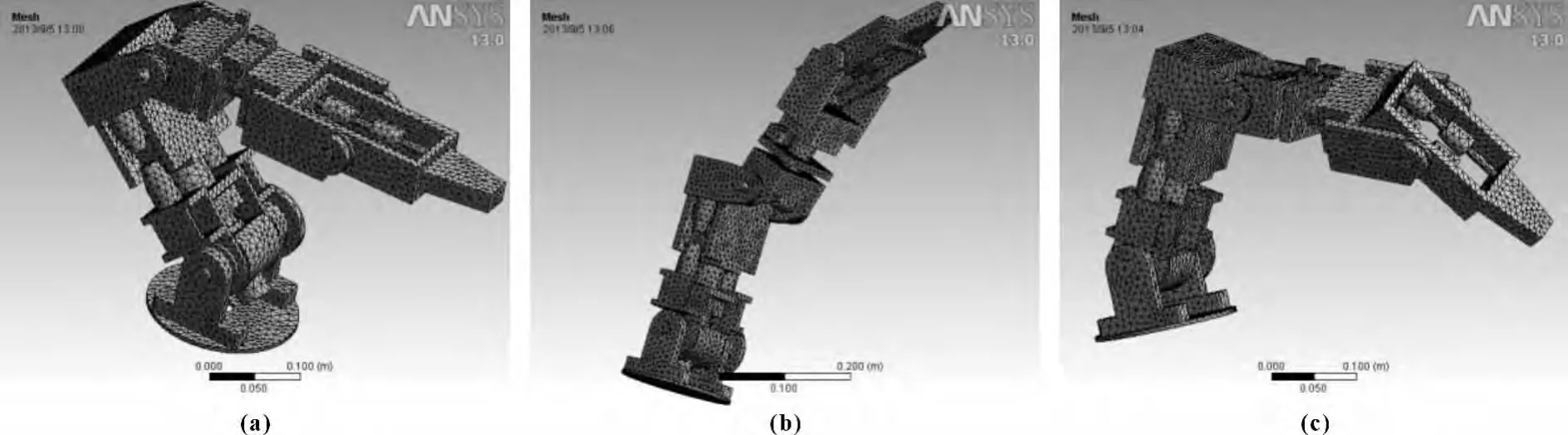
圖7 機械臂有限元模型
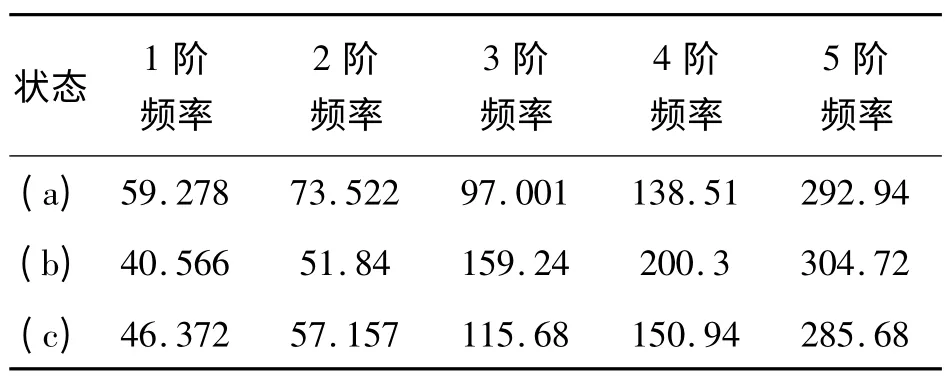
表1 模態分析結果Hz
從表1的分析結果可以看出機械臂最低固有頻率在40 Hz左右,因此機械臂的激勵應小于該值。對于該機械臂來說,主要震動來源為電機和離合器。該機械臂底座驅動電機正常輸出轉速為800 r/min,手臂關節驅動電機輸出轉速為1 500 r/min,轉化為頻率分別為13.3 Hz,25 Hz;同時離合器PWM調速頻率為20 Hz左右。因此該機械臂的激勵頻率遠離最低共振頻率,從而保證機械臂在正常工作狀態下不會發生共振現象。
4 機械臂的運動學分析
4.1 坐標系統及運動學求解
為了對機械臂進行運動學求解,首先建立其坐標系統。為方便機械臂幾何法逆解的計算,坐標系建立情況未完全按照D-H法進行,具體坐標系建立情況如圖8所示。
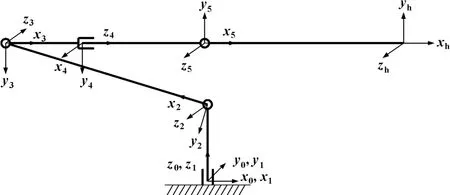
圖8 機械臂坐標系統
圖8中,從基礎坐標系附近開始,5個連桿的長度分別為89 mm、245.9 mm、85 mm、147 mm、231.7 mm。根據相鄰坐標系之間的空間相對位置關系,可得到相鄰關節之間的位姿變化矩陣:
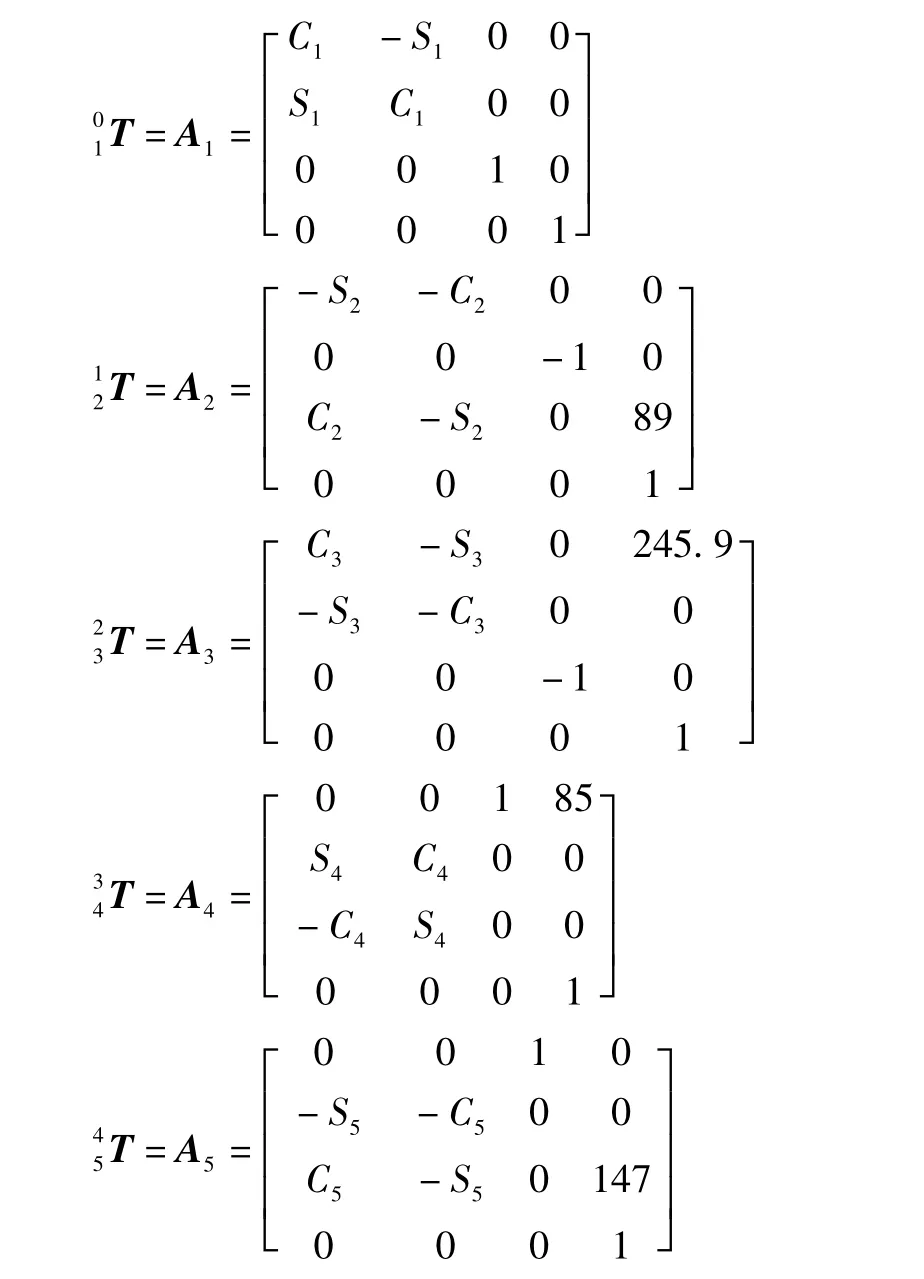
其中Ci(i=1,2,…,5)代表cosθi,Si(i=1,2,…,5)代表sinθi。將各個關節變換矩陣順序相乘,即可得到末端關節的位姿矩陣:
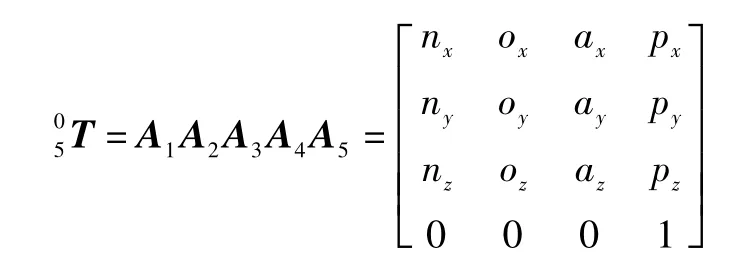
其中:n,o,a 3個向量描述了機械臂末端連桿的姿態,p向量描述了末端連桿的位置。
4.2 運動仿真
為了驗證機械臂機構的可行性,采用MATLAB對其進行追蹤直線軌跡的運動仿真,空間直線為從點(354,173,403)運動到點(343,286,453)。將運動過程分為20段,采用MATLAB計算各節點處的關節空間解。其中,機械臂對位置、姿態的追蹤效果如圖9,圖10所示,關節角度位移曲線如圖11所示。
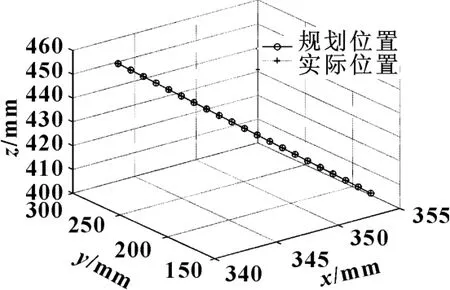
圖9 位置追蹤效果
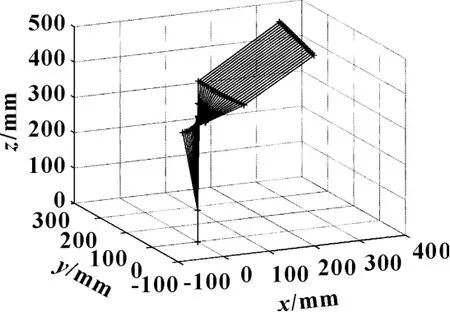
圖10 姿態追蹤效果
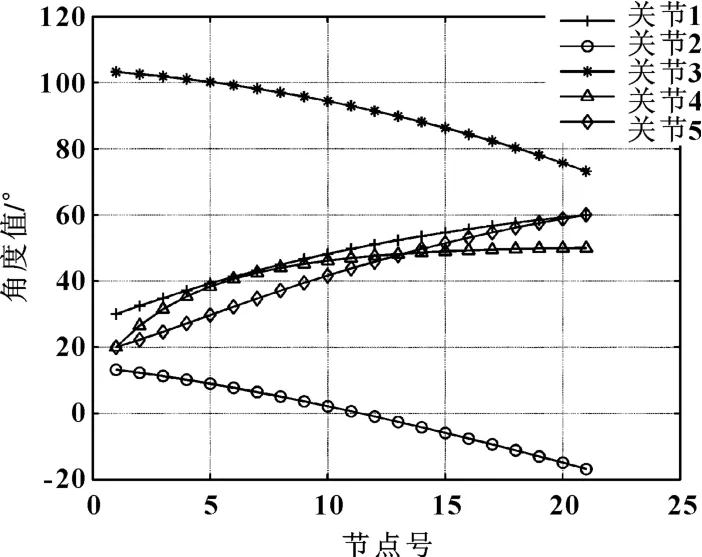
圖11 關節位移曲線
從圖中可以看出,該機械臂能夠實現直線軌跡的追蹤,且各關節運動較為柔順,仿真證明該機械臂的機械結構可行。
5 樣機及總結
機械臂樣機的驅動電機采用BMP6224-Y系列的空心杯無刷直流電機,離合器采用BO-3.5神鋼離合器,機械臂完全伸展總長750 mm,質量為22 kg。底座運動范圍0°~360°,從底座向外4個活動關節運動范圍依次為0°~180°,0°~180°,-170°~170°,-90°~90°,樣機模型如圖12所示。
該機械臂實現了單電機驅動,通過仿真分析,表明該機械臂可以實現復雜運動軌跡。與傳統機械臂相比,該機械臂所需電機和離合器數目較少,因此更輕,更緊湊,在航天應用這種對發射負載質量限制高的情況下,理論上比傳統機械臂更適宜作為空間機械臂完成空間加注、在軌維修等任務。對當前機械臂來說,離合器調速性能還有待高,如何實現這種類型機械臂的高精度、快響應離合器調速是隨后需要研究的問題。
[1]于登云,孫京,馬興瑞.空間機械臂技術及發展建議[J].航天器工程,2007,16(4):1-9.
[2]ODA M,KIBE K,YAMAGATA F,ETS-VII.Space Robot in-orbit Experiment satellite[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,1996:739-744.
[3]ODA M.Space Robot Experiments on NASDA's ETS-VII Satellite-Preliminary Overview of the Experiment Results[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,1999:1390-1395.
[4]HIRZINGER G,BRUNNER B.ROTEX-the First Remotely Controlled Robot in Space[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,1994:2604-2611.
[5]HIRZINGER G,LANDZETTEL K,REINTSEMA D,et al.Rokviss-robotics Component Verification on Iss[C]//The 8thInternational Symposium on Artificial Intelligence,Robotics and Automation in Space-Isairas.Munich,Germany,2005:3879-3885.
[6]KARBASI H,HUISSOON J P,KHAJEPOUR A.Uni-drive Modular Robots:Theory,Design,and Experiments[J].Mechanism and Machine Theory,2004,39(2):183-200.
[7]XIE M.Fundamental of Robotics:Linking Perception to Action[M].Singapore:World Scientific,2003.
[8]ZHU H H,XIE M,LIM M K.Modular Robot Manipulator Apparatus[P].PCT/SG00/0002,January 2000.
[9]LI M J.Toward Single Motor Driven Biped Robot[D].Singapore:School of Mechanical and Aerospace Engineering Nanyang Technology University,2005.
[10]李世其,劉洋,朱文革,等.多關節輕型機械臂的設計研究[J].航天器工程,2009,18(3):48-52.
[11]馬培蓀,朱海鴻,王建濱,等.一種蛇形柔性臂的系統及結構[J].上海交通大學學報,2001,35(1):72-75.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
