異步電動機直接轉矩控制系統仿真對比研究
2014-05-11 03:09:30盧秉娟黃會營姬宣德
制造業自動化 2014年10期
盧秉娟,黃會營,姬宣德
(洛陽理工學院 電氣工程與自動化系,洛陽 471023)
異步電動機直接轉矩控制系統仿真對比研究
盧秉娟,黃會營,姬宣德
(洛陽理工學院 電氣工程與自動化系,洛陽 471023)
0 引言
異步電動機直接轉矩控制技術是繼異步電動機矢量控制技術之后又一高性能的電動機控制方法,它很大程度上解決了矢量控制算法復雜、控制性能易受電機轉子參數變化影響等缺點,為感應電動機的高性能控制開辟了嶄新方向。但傳統直接轉矩控制(BASIC-DTC)系統[1]的轉矩脈動與磁鏈脈動一直制約著異步電動機直接轉矩控制系統的靜動態性能。為了降低轉矩脈動與磁鏈脈動,把空間電壓矢量調制(SVM)引入異步電動機直接轉矩控制系統,利用PI調節器代替滯環比較器,構成空間矢量調制直接轉矩控制(SVM-DTC)系統[2],實現轉矩和磁鏈的控制。本文利用MATLAB仿真工具建立了異步電動機BASIC-DTC系統仿真模型和SVM-DTC系統仿真模型,并對其進行仿真。仿真結果表明, 異步電動機SVM-DTC系統系統克服了BASIC-DTC系統的固有缺陷,同時獲得了與BASIC-DTC系統一樣的動態性能。
1 異步電動機BASIC-DTC系統和SVM-DTC系統的工作原理
1.1 異步電動機BASIC-DTC系統工作原理
異步電動機BASIC-DTC系統的工作原理就是利用速度調節器輸出的給定轉矩信號與轉矩模型計算出的反饋轉矩信號相比較生成轉矩偏差信號,再利用給定定子磁鏈幅值信號與幅值模型計算出的反饋定子磁鏈幅值信號相比較生成定子磁鏈幅值偏差信號,然后將轉矩偏差信號和定子磁鏈幅值偏差信號分別送入通過轉矩滯環比較器和磁鏈滯環比較器,最終產生轉矩開關信號和磁鏈開關信號,根據定子磁鏈矢量所在的區間,通過開關選擇表選取所需的電壓空間矢量,實現轉矩和磁鏈的控制,圖1是異步電動機BASIC-DTC系統框圖。
異步電動機的BASIC-DTC方法是傳統的控制策略,由于其轉矩和磁鏈采用雙位式控制器簡化了控制器的結構;選擇定子磁鏈作為被控量提高了控制系統的魯棒性,采用直接轉矩控制可以獲得快速的轉矩響應,因此,這種控制方法在交流調速領域得到廣泛應用。但是開關選擇表中電壓空間矢量的個數有限,使得轉矩和磁鏈往往不能同時得到最佳調節,最終導致轉矩和磁鏈脈動;轉矩滯環比較器和磁鏈滯環比較器的使用又導致了PWM逆變器中的器件開關頻率不固定。這些問題一直制約著異步電動機BASIC-DTC系統的發展。
1.2 異步電動機SVM-DTC系統工作原理
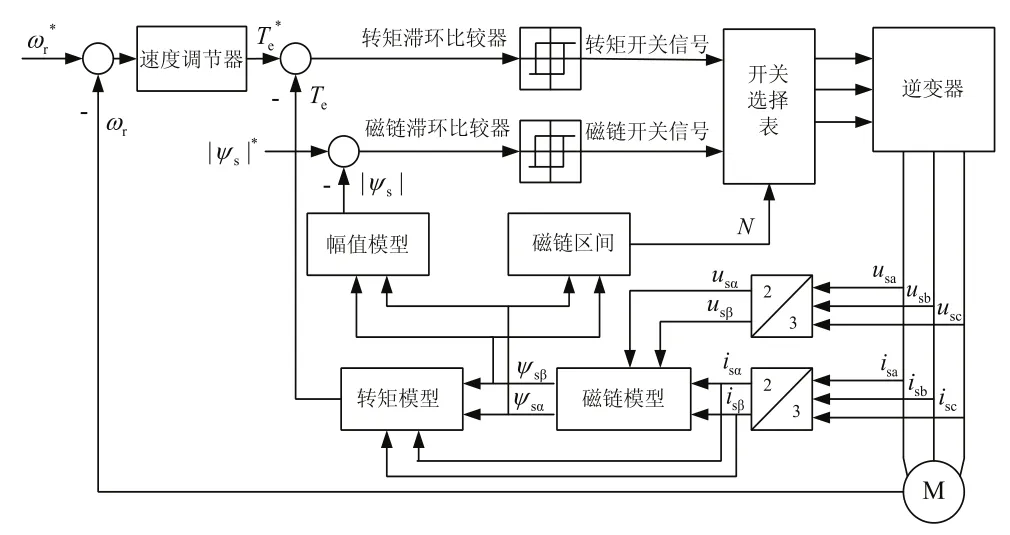
圖1 異步電動機BASIC-DTC系統框圖
為了解決異步電動機BASIC-DTC系統的轉矩脈動、磁鏈脈動和開關頻率不固定等問題,把空間矢量調制(SVM)引入異步電動機DTC系統,利用轉矩調節器(ATR)和磁鏈調節器(AψR)取代轉矩滯環比較器和磁鏈滯環比較器,利用空間矢量調制(SVM)取代電壓空間矢量開關選擇表,構成異步電動機SVM-DTC系統,實現對轉矩和磁鏈的控制。圖2是異步電動機SVM-DTC系統框圖。

圖2 異步電動機BASIC-DTC系統框圖
在圖2中,轉矩調節器(ATR)輸出控制轉矩需要的電壓空間矢量分量,磁鏈調節器(AR)輸出控制磁鏈需要的電壓空間矢量分量,然后利用旋轉逆變換把坐標系下的和變換到坐標系下的和,最后利用空間矢量調制(SVM)算法生成驅動PWM逆變器的PWM信號。由于轉矩調節器(ATR)和磁鏈調節器(AψR)可以實現連續平滑的調節輸出,由固定開關周期的空間矢量調制(SVM)算法合成任意復制和相位的電壓空間矢量,因而可以有效抑制轉矩和磁鏈脈動,而且使得PWM逆變器的開關頻率固定。如果說BASICDTC方法是實現了對異步電動機轉矩和磁鏈的“定性”控制,那么SVM-DTC方法是實現了對異步電動機轉矩和磁鏈的“定量”控制,因此異步電動機SVM-DTC系統在控制性能上優越于異步電動機BASIC-DTC系統。
2 異步電動機動態數學模型和磁鏈觀測器

式中:Pn為極對數。
運動方程為:


3 異步電動機BASIC-DTC系統和SVM-DTC系統仿真模型
3.1 異步電動機BASIC-DTC系統仿真模型
根據異步電動機BASIC-DTC系統框圖(如圖1所示),應用利用MATLAB中的Simulink仿真工具箱和SimPowerSystems模型庫建立異步電動機BASIC-DTC系統仿真模型,如圖3所示。仿真模型包括主電路和控制電路,主電路包含直流電源模塊、PWM逆變器模塊、異步電動機模塊,控制電路主要包含速度調節器、滯環比較器、磁鏈區間判斷模塊和電壓空間矢量開關選擇表。這些模塊在SimPowerSystems模型庫都有封裝好的模型,因此只要進行參數設置就可以應用,不要需要再進行建模,降低了仿真難度,極大地方便了模型仿真。

圖3 異步電動機BASIC-DTC系統仿真模型
3.2 異步電動機SVM-DTC系統仿真模型


圖4 異步電動機SVM-DTC系統仿真模型
4 系統仿真

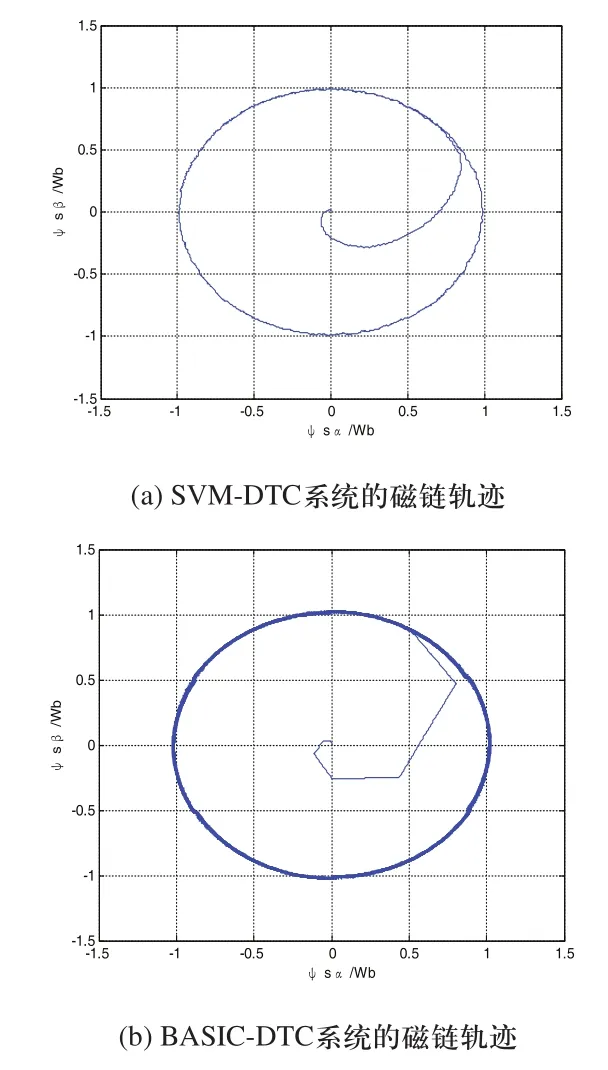
圖5 定子磁鏈軌跡
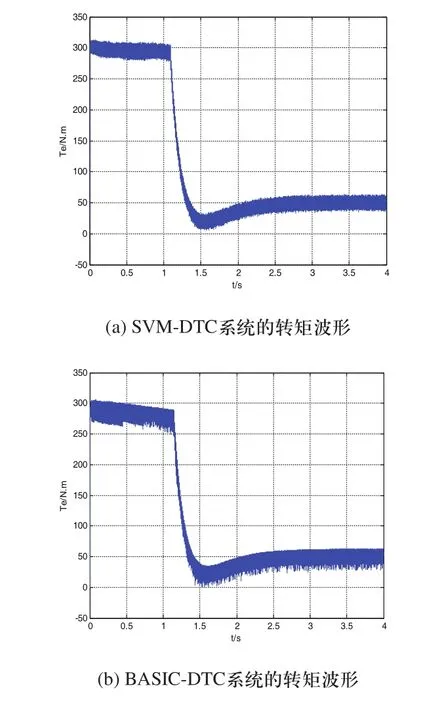
圖6 轉矩波形
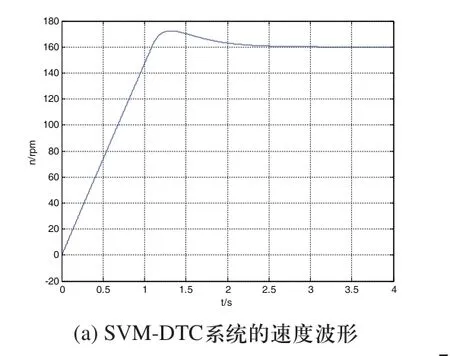

圖7 速度波形
從圖5可以看出:SVM-DTC的磁鏈脈動小于BASIC-DTC的磁鏈脈動。原因在于SVM-DTC中SVM算法可以產生任意幅值和相位的電壓空間矢量,而BASIC-DTC開關選擇表中的電壓空間矢量個數有限。
從圖6可以看出:由于SVM算法優越于開關選擇表的原因,SVM-DTC的轉矩脈動要小于BASICDTC的轉矩脈動。
從圖7可以看出:盡管SVM-DTC使用了轉矩和磁鏈PI調節器,比BASIC-DTC的轉矩和磁鏈滯環比較器反映慢,但是SVM-DTC系統的速度動態響應并不慢于BASIC-DTC系統的速度動態響應。
5 結束語
借助MATLAB仿真平臺,利用Simulink仿真工具箱和SimPowerSystems模型庫,建立了異步電動機BASIC-DTC系統仿真模型和SVM-DTC系統仿真模型,并進行了系統對比仿真。仿真結果表明:與異步電動機BASIC-DTC系統相比,異步電動機SVM-DTC系統有效地抑制了轉矩和磁鏈脈動,克服了開關頻率不固定的缺點,同時獲得了與BASIC-DTC系統一樣的動態響應。
[1]Depenbrock M. Direct self-control of inverter fed induction machine[J].IEEE Trans on Power Electronics,1988,3(4):420-429.
[2]Lascu, C.I.Boldea,and f.Blaabjerg. A modified direct torque control of induction motor sensorless drive[J]. IEEE Trans on Industry Applications,2000,36(1):122-130.
[3]Huang Wenxin,Li yong,Hu Yuwen. Direct Torque Control Strategy for Asynchronous Motor Based on Space Vector Modulation[J].Journal of Nanjing University of Aeronautics &Astronautic,2007,39(1):127-132.
[4]MarchesoniM,SegarichP,SoressiE.A simple approach to fl ux and speed observation in induction motor drives[J].IEEE Transaction Industrial Electronics,1997,4(4):528-535.
[5]ISAO TAKAHASHI.A New Quick Respouse and High Eff i ciency Control Strategy of an Induction Motor[J]. IEEE Transaction on Industry Applications,1986,22(5):820-827.
[6]黃文新,胡育文,李磊.一種新穎的空間電壓矢量調制逆變器的死區補償方法[J].南京航空航天大學學報,2002,34(2):143-147.
Comparative study of induction motor direct torque control system simulation
LU Bing-juan, HUANG Hui-ying, JI Xuan-de
在詳細分析異步電動機傳統直接轉矩控制(BASIC-DTC)系統和空間矢量調制直接轉矩控制(SVM-DTC)系統的基礎上,利用MATLAB仿真平臺分別建立了異步電動機BASIC-DTC系統仿真模型和SVM-DTC系統仿真模型,并對兩種仿真模型進行了對比仿真。仿真結果表明:與異步電動機BASIC-DTC系統相比,異步電動機SVM-DTC系統有效地抑制了轉矩和磁鏈脈動,克服了開關頻率不固定的缺陷,同時獲得了與BASIC-DTC系統一樣的動態響應。
交流調速系統;傳統直接轉矩控制;空間矢量調制直接轉矩控制;系統仿真
盧秉娟(1961 -),女,河南洛陽人,副教授,碩士,研究方向為電力電子與電力傳動。
TM343
A
1009-0134(2014)05(下)-0001-04
10.3969/j.issn.1009-0134.2014.05(下).01
2013-12-06
河南省教育廳自然科學研究計劃項目(2010B470009)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
