漂浮式潮流電站載體水動力性能分析
2014-05-15 02:29:32陳浩張亮
應用科技 2014年1期
關鍵詞:分析
陳浩,張亮
哈爾濱工程大學 船舶工程學院, 黑龍江 哈爾濱 150001
漂浮式潮流電站載體水動力性能分析
陳浩,張亮
哈爾濱工程大學 船舶工程學院, 黑龍江 哈爾濱 150001
基于三維勢流理論,在頻域范圍內,采用DNV船級社的SESAM軟件系統,對某漂浮式潮流電站進行了水動力性能分析。通過分析,得出了橫搖、縱搖、垂蕩等響應變量的傳遞函數;結合載體實際工作時所處的海況,得出響應譜,并對其耐波性進行短期預報。計算結果表明,載體在橫浪下垂蕩和橫搖較劇烈,各個浪向角下縱搖較接近。
漂浮式潮流電站;水動力性能;傳遞函數;響應譜;短期預報
潮流電站載體可分為漂浮式、樁柱式和座底式。漂浮式潮流電站載體相較于樁柱式和座底式甲板面積較大,便于人員作業,并且可以直接拖回岸上維修,適應深水海況;若水深大于40 m,海底為巖石,座海底式或樁柱式載體則無法滿足要求[3]。
水動力分析的目的是研究載體在海浪中的動態響應。按照St.Denis和Pierson理論[4],載體在海浪中的響應是線性的,可用譜密度來描述其隨機性。所以,載體在隨機不規則波中的響應譜可由單位波幅波中的響應(傳遞函數)和海浪譜來確定。由此可知,載體在規則波中響應的分析是它在隨機不規則海浪中響應分析的基礎。文中基于這一思想,利用勢流理論,采用SESAM軟件對某200 kW潮流電站載體的水動力性能進行計算,為潮流電站浮式載體的選型提供了參考。
1 理論基礎
文中首先通過水動力計算,得到載體六自由度運動變量的傳遞函數[5]。進而結合海浪譜,得到各變量的響應譜,對響應譜進行統計分析,得到響應值。
1.1 傳遞函數
通過水動力計算可以得到附加質量、附加阻尼、回復力以及波浪力等信息,將這些數值代入如下六自由度運動方程式中進行求解,可以得到載體在規則波中的運動響應。

式中:Mjk為廣義質量矩陣項,Ajk、Bjk、Cjk分別為由第k個自由度的運動引起的第j個自由度的附加質量系數、附加阻尼系數、回復力系數,統稱為水動力系數;Fj為船體在第j個自由度方向所受的波浪力,包括Froude-Krylov力和繞射力;kη、kη˙、kη˙˙分別為第k個自由度運動的位移、速度和加速度;eω為遭遇頻率,它與波浪頻率ω有如下關系:

式中:V為航速,g為重力加速度,β為浪向角,文中載體無航速,故eω=ω。
劍三官方小說《萬花六記》即將上市,后三記《裟欏記》、《刑天記》、《桃園記》將與各位讀者見面,獲取圖書上市詳情,請關注劍三官網及次元書館官方微博。
由載體在規則波中的運動響應可以得到載體與波浪之間的傳遞函數,傳遞函數又稱響應幅值算子[6](response amplitude operator, RAO),是用來描述載體在波浪中響應的一種重要數。傳遞函數均以無量綱形式給出。其中,平動(即縱蕩、橫蕩、垂蕩)傳遞函數以規則波波幅無因次化,轉動(即橫搖、縱搖、艏搖)傳遞函數以波陡無因次化。以垂蕩和橫搖為例,無因次化過程如下:

式中:f(RAOz)、f(RAO?)分別為垂蕩和橫搖的傳遞函數;z0、?0分別為垂蕩和橫搖的運動幅值;k為波數,ζ0為波幅。
1.2 波浪譜和響應譜
波浪譜密度函數是平穩隨機過程的頻率描述,它表示不規則波浪的能量相對于頻率的分布,所以又稱為能量譜[7]。目前在國際上廣泛采用的波浪譜有P-M譜和JONSWAP譜,其中JONSWAP譜形狀陡而尖,適用于風區受限海域;而P-M譜則適用于充分發展的海域。對海區波浪參數進行分析之后,決定采用IACS推薦的P-M雙參數(有義波高Hs,過零周期Tz)波浪譜。
對于電站載體等線性系統,其響應譜等于波浪譜乘以系統的傳遞函的模f2(RAO),即

2 建模
文中以某200 kW潮流電站載體為研究對象,使用DNV開發的軟件SESAM計算和分析其水動力性能。本次數值模擬用到的是其GeniE建模模塊及HydroD水動力計算模塊,在HydroD中調用WADAM程序計算,POSTRESP進行結果分析。GeniE用于建立載體的流體動力模型,生成輸入接口文件T1.FEM;WADAM基于三維勢流理論,調用T1.FEM文件,計算此船的運動響應;Postresp用于顯示計算結果、譜分析等[8]。
電站載體主尺度 :總長35 m,設計水線長5 m,寬度17 m,型深3 m,設計吃水1 m。
采用右手坐標系,X軸為中縱剖面與基平面交線且指向船首,Y軸指向左舷,Z軸向上,原點為中站面、中縱剖面和基平面的交點。利用船體的對稱性,采用二分之一模型(左舷),如圖l所示。
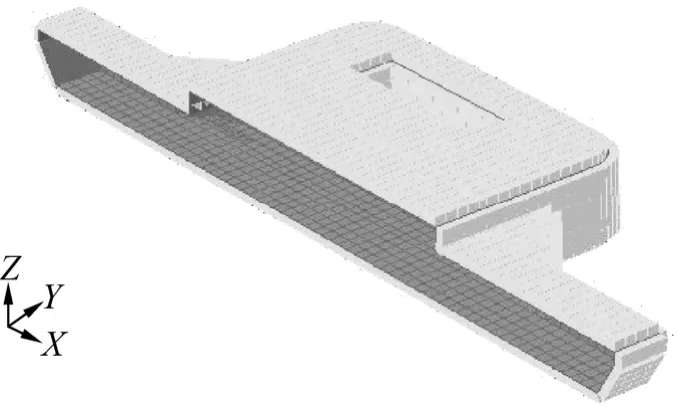
圖1 載體濕表面模型
將T1.FEM文件導入HydroD中,如圖2。HydroD設置水深為40 m,波浪頻率范圍取:0.1~2.0rad/s;由于船體左右對稱,浪向范圍取:0~180°,間隔45°。定義迎浪時β=180°,左舷橫浪時β=90°,隨浪時β=0°。

圖2 載體水動力模型
3 計算結果及分析
從POSTRESP中提取計算數據,得到理想流體中載體在單位規則波下水動力響應;載體工作海區典型有義波高Hs=2 m,Tz=5 s,使用PM譜模擬海況得到運動響應譜,并作短期預報。
3.1 運動響應傳遞函數
從圖3~5曲線可以看出:1)當ω無限小,即波長λ無限長時,載體近似認為是水中一質點,其運動可描述為“隨波逐流” ;當ω無限大,即波長λ無限短時,水面可近似認為不動,載體基本無運動響應;計算結果符合一般規律。2)波長與載體總長比(λ/L)對垂蕩和縱搖影響很大,一般其幅頻響應曲線峰值發生在1<λ/L<2.5范圍內;在零航速時峰值偏向低頻區,離載體固有周期較遠,相對安全。由圖3、4可以看出垂蕩峰值出現在0.3 rad/s<ω<0.7 rad/s范圍內,縱搖峰值在1 rad/s<ω<1.2 rad/s,都在低頻區;也與1<λ/L<2.5這一規律相吻合。各個浪向角下的縱搖響應相近,單位波幅下縱搖角不超過5°。3)對于橫搖運動,當1.5 rad/s<ω<1.7 rad/s時,橫搖幅值比較大;浪向角 90°時出現最大值,此時載體處于共振區。但浪向角在±45°范圍內,橫搖運動較平穩,單位波幅下橫搖角不超過8°。4)若拖航時控制載體和浪向的夾角范圍在±20°范圍內,各個響應值均比較小,運動趨于安全[9]。

圖3 垂蕩響應傳遞函數

圖4 縱搖響應傳遞函數

圖5橫搖響應傳遞函數
從以上分析可見,此載體運動響應符合一般船舶運動規律。故文中采用的研究方法可行,計算結果可信。現列出單位波幅下各個響應的最不利海況及最大幅值,如表l所示。

表1 載體最不利海況及傳遞函數最大幅值
3.2 運動響應統計特征
船舶運動響應譜曲線如圖6~8所示。
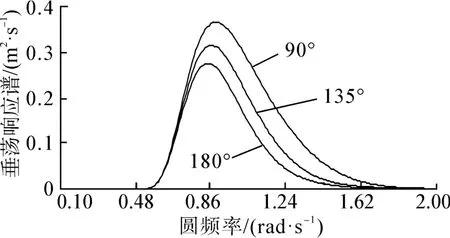
圖6 垂蕩響應譜

圖7 縱搖響應譜

圖8 橫搖響應譜
由響應譜統計值可得此海況(Hs=2 m,Tz=5 s)持續3 h短期預報,統計結果如表2所示。從表2可以看出:垂蕩和橫搖在橫浪時響應最大,可能最大幅值分別達3.392 m和0.434 rad,應盡量避開橫浪的情況。縱搖在各個浪向角下的有義值和可能最大值較相近,且數值較大,可見載體的縱搖是比較劇烈的。

表2 3h短期預報
3.3 長期預報
長期預報的時間通常為數年或全壽命周期,載荷和海況是變化的。根據微分思想,可以將許多短期預報有序組合起來做長期預報。用于長期預報的波浪散布圖選自《西北太平洋波浪統計集》[10]的Y1區塊(緯度:35°~37.5°~40°N,經度:119.2°~122°~127°E),如圖9所示。Y1區塊中每個短期海況用P-M譜模擬,長期分布應用兩參數Weibull模型擬合。

圖9 西北太平洋海域區塊劃分
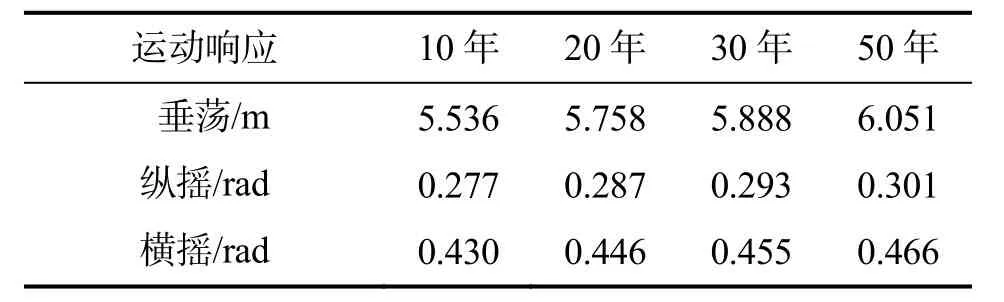
表3 載運動響應長期預報
表3給出了10年重現期,20年重現期,30年重現期及50年重現期預報極值。
4 結束語
文中基于三維勢流理論,對某潮流電站的垂蕩、縱搖和橫搖響應作了分析和短期預報。結果表明:載體在有義波高為2 m,跨零周期為5 s的海況下一旦遭遇橫浪作用,垂蕩和橫搖幅值比較大,此時非常危險,應加以防護。在設計時,應充分考慮載體的水動力響應特性,可使其6個自由度的運動向高頻和低頻偏移,避開波浪能量集中的頻率范圍,使駁船具有較小的波浪響應。
[1] 劉富鈾, 趙世明.我國海洋能研究與開發現狀分析[J]. 海洋技術, 2007, 26(3): 118-120.
[2] 王傳崑. 國內外潮流能開發利用現狀及中歐合作研究[C]∥中國第六屆光伏會議. 昆明, 中國, 2000: 295-295.
[3] 荊豐梅, 張亮. 漂浮式潮流電站總體設計[C]∥中國可再生能源學會海洋能專業委員會第三屆學術討論會. 溫嶺,中國, 2010: 116-124.
[4] St DENIS M,PIERSON W J Jr. On the motions of ships in confused seas[J].Trans SNAME, 1953(61): 280-358.
[5] 楊代盛, 桑國光, 李維揚, 等. 船舶強度的概率方法[M].哈爾濱: 哈爾濱工程大學出版社, 1994: 52-84.
[6] 李積德. 船舶耐波性[M]. 哈爾濱: 哈爾濱工程大學出版社, 2007: 53-60.
[7] 胡仁, 李典慶, 陳伯真. 船舶與海洋工程結構疲勞可靠性分析[M]. 哈爾濱: 哈爾濱工程大學出版社, 2010: 67-72.
[8] 張海彬,趙耕賢. 水動力分析在海洋結構物設計中的應用[J].中國海洋平臺, 2008, 23(1): 1-6 .
[9] 盛振邦, 劉應中. 船舶原理[M]. 上海: 上海交通大學出版社, 2008: 23-24.
[10] 方鐘圣. 西北太平洋波浪統計集[M]. 北京: 國防工業出版社, 1996: 103-105.
Hydrodynamic performance analysis of floating current power station
CHEN Hao,ZHANG Liang
College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China
The hydrodynamic performance analysis of a floating current power station is presented with the DNV/SESAM in this paper. The analysis is carried out in frequency domain based on the three-dimensional potential flow theory. Transfer functions of motions, such as roll, pitch and heave are obtained. Besides, the short-term prediction of the seakeeping has been done and the response spectrum of the power station is obtained related to the actual sea state that the power station works on. The calculation result shows that the heave and roll is relatively violent in a beam sea, and the pitch is close in each wave direction.
floating current power station; hydrodynamic performance; transfer function; response spectrum; short-term prediction
TV744
A
1009-671X(2014)01-0065-04
10.3969/j.issn.1009-671X.201305020
2013-05-23.
國家科技支撐計劃資助項目(2008BAA15B04).
陳浩(1986-), 男, 碩士研究生;張亮(1959-), 男, 教授, 博士.
陳浩, E-mail: 543481013.qq.com.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
