Smith-RBF-PID控制算法在工業平縫機腳踏板調速模塊中的應用
2014-05-25 02:52:00鄧先智
西南科技大學學報 2014年1期
關鍵詞:系統
鄧先智
(綿陽職業技術學院機電工程系 四川綿陽 621000)
在工業平縫機發展中,縫制效率是一個重要的課題。而縫制效率主要是由縫紉機的縫紉速度所決定。在縫制過程中,通過人工踩踏腳踏板控制縫紉機的啟動、調速和結束縫制。高速工業平縫機控制系統對縫紉機的啟動、停止和縫紉速度的技術要求非常嚴格。要求起動輕柔、迅速,升速從0 rpm到4 500 rpm的時間要小于100 ms;停針要迅速準確,速度從4 500 rpm減到0 rpm的時間小于120 ms。同時在調速過程中要求無級調速,速度變化要平穩。一般的系統在調速模塊中采用的是PI[1]或改進的PID控制算法[2],此類算法雖然采取了高速和低速分段控制方法,但是當PID參數整定后,在這之間的控制過程都是固定不變的。而平縫機調速模塊的伺服系統是一個多變量、非線性、強藕合、大滯后系統。在負載變化或者出現擾動時的滯后時間范圍內,被控的參數是無法進行調整的,使得系統不能及時反應,立即補償。致使產生較明顯的超調量和需要較長的調節時間,無法滿足系統要求。
Smith預估補償控制是克服純滯后的一個有效控制方法[3]。設計的原理是與PID控制器并聯一個補償環節,用來補償被控對象中的純滯后部分。
RBF神經網絡有很強的非線性擬合能力,可映射任意復制的非線性關系,而且具有學習算法簡單、運算量小、收斂快等優點。利用RBF神經網絡在線自學習整定PID參數,構成一個具有自調節能力、穩定的控制器。
為了滿足系統的抗擾性、快速性、穩定性,提高控制質量,本文提出了一種基于Smith預估補償與RBF神經網絡模糊PID控制算法。
1 Smith預估補償控制原理
針對純滯后系統閉環特征方程含有影響系統控制品質的純滯后問題,1957年Smith提出了一種預估補償控制方案,即在PID反饋控制基礎上引入一個預估補償環節,使閉環特征方程不含有純滯后項,以提高控制質量[4]。
在圖1所示的單回路控制系統中,控制器的傳遞函數為D(s),被控對象傳遞函數為Gp(s)e-τs,被控對象中不包含純滯后部分的傳遞函數為Gp(s),被控對象純滯后部分的傳遞函數為e-τs。
圖1所示系統的閉環傳遞函數為:

由式(1)可以看出,系統特征方程中含有純滯后環節,它會降低系統的穩定性。如果能把圖1中假想的變量N測量出來,那么就可以按照圖2所示那樣把N點信號反饋到控制器,這樣就把純滯后環節移到控制回路外邊。
理想閉環系統結構示意圖如圖2所示。由圖2可以得出閉環傳遞函數為:

由上式可見,由于反饋信號N沒有延遲,閉環特征方程中不含有純滯后項,所以系統的響應將會大大改善。但是在實際情況中,腳踏板調速系統是大滯后系統,在N點將會出現負荷擾動,所以這種方案是無法實現的。

圖1 純滯后系統結構示意圖Fig.1 Pure lag system structure diagram
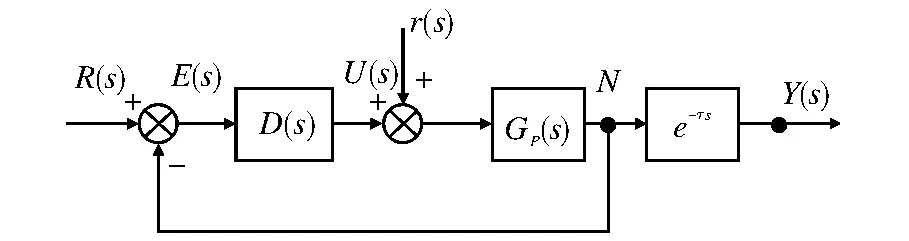
圖2 理想閉環系統結構示意圖Fig.2 Ideal closed - loop system structure diagram
實際工程上設計Smith預估器是在PID控制器中引入預估補償器DC(s),其原理是將其并聯在控制器D(s)上。如圖3所示。其傳遞函數為:


圖3 Sm ith預估補償控制系統框圖Fig.3 Smith forecast compensation control system block diagram
圖中虛線部分是帶純滯后補償控制的控制器,其傳遞函數為:

如果模型精確,可令GC(s)=GP(s),τm=τ且不存在負荷擾動,r(s)=0.
經過純滯后補償控制后系統的閉環傳遞函數為:

由式(3)可見,帶純滯后補償的閉環系統與圖2所示的理想結構是一致的,其特征方程為:1+D(s)Gp(s)=0。經補償后 ,實現了將純滯后環節移到閉環控制回路之外,純滯后環節e-τs已經不出現在分母中,從而有效消除了純滯后對控制系統的影響。由此可知,使用Smith控制方法建立精確的預估模型需要知道被控對象的數學模型[4]。
2 RBF神經網絡的PID整定
神經網絡有很強的非線性擬合能力,可映射任意復雜的非線性關系,而且學習規則簡單,便于實現。可以克服Smith控制方法必須確切地知道被控對象的數學模型的缺點。本文采用的RBF神經網絡的PID算法,是一種魯棒性強、控制精度高的控制方法。它主要包括兩個部分:一是采用增量式PID的控制算法;二是利用神經網絡對Jacobian矩陣(信息)進行辨識[5]。
2.1 RBF神經網絡算法
RBF神經網絡是一種性能優良的三層前饋型神經網絡,由輸入到輸出的映射是非線性的,而隱含層空間到輸出空間的映射是非線性的,從而大大加快了學習速度并避免局部極小值問題。RBF網絡結構如圖4所示。

圖4 RBF神經網絡結構示意圖Fig.4 RBF neural network structure diagram
在 RBF 網絡結構中,X=[x1,x2,…,xn]T為網絡的輸入向量。設RBF網絡的徑向基向量H=[h1,h2,…,hj,…,hm]T,其中hj為高斯基函數:

網絡的第j個結點的中心矢量為Cj=[cj1,cj2,…,cji,…,cjn],其中,i=1,2,…,n。
設網絡的基寬向量為:B=[b1,b2,…,bn]T,bj為節點j的基寬度參數且大于零。網絡的權向量為:

辨識網絡的輸出為:

辨識器的性能指標函數為:

根據梯度下降法,輸出權、節點中心及節點基寬參數的迭代算法如下:

其中,η為學習速率,α為動量因子。
Jacobian矩陣(即為對象的輸出對控制輸入變化的靈敏度信息)算法為:

式中,x1=Δu(k)。
2.2 RBF網絡PID整定原理
RBF網整定PID控制參數采用增量式PID控制器,控制誤差為:

神經元PID控制器的三項輸入為:

控制算法為:

神經網絡整定指標為:

kp,ki,kd的調整采用梯度下降法:
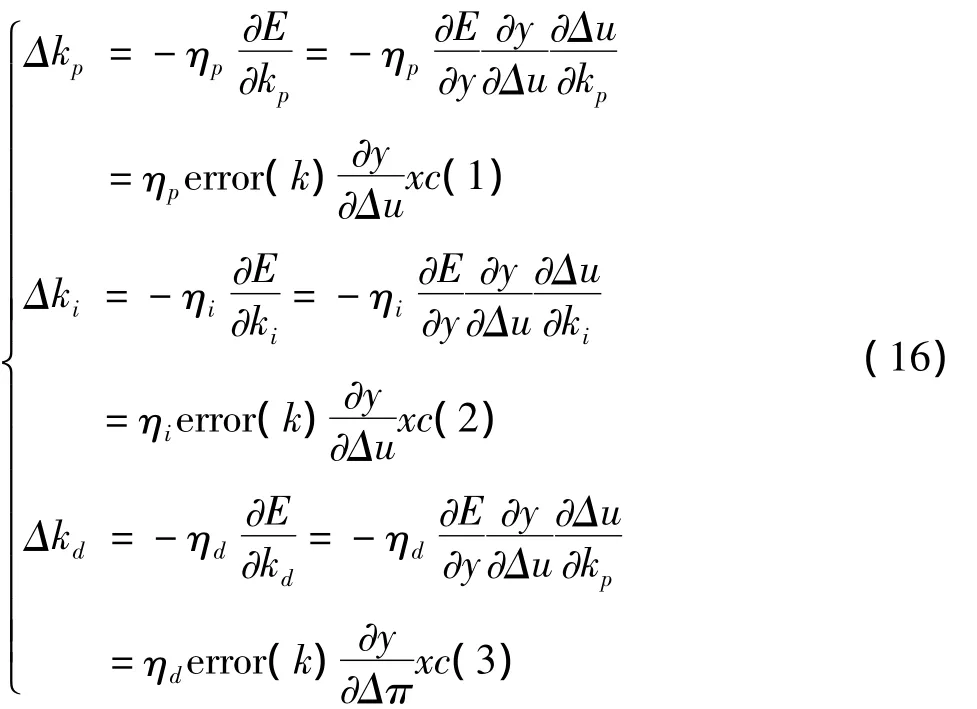
式中,ηp,ηi,ηd分別為比例、積分、微分的學習速率為被控對象的Jacobian信息,可通過神經網絡的辨識而得[6]。
RBF整定PID控制系統結構圖如圖5所示。

圖5 RBF網絡整定PID控制框圖Fig.5 RBF network setting PID control block diagram
3 基于Smith預估補償與RBF神經網絡PID控制算法及仿真結果
3.1 Smith預估補償與RBF神經網絡PID控制算法
Smith預估補償與RBF神經網絡PID控制結構圖如圖6所示。利用RBF神經網絡不依賴于控制對象的精確模型的優點和在線學習方法,利用Smith預估補償器對純滯后系統的良好控制,以及利用PID控制能在小偏差范圍內實現精確控制,達到優勢互補的作用。

圖6 Sm ith預估補償與RBF神經網絡模糊PID控制框圖Fig.6 Smith forecast compensation and fuzzy RBF neural network PID control block diagram
3.2 仿真研究
本文研究的對象是平縫機調速模塊的伺服系統,該系統可以用帶有純滯后的一階模型模擬,控制對象為:Gp(s)=,采樣時間為20 s,輸入信號為方波響應。RBF的結構為3-6-1,網絡辨識的3個輸入為 rinm(k)=[Δu(k),yout(k),yout(k-1)],輸出youtm(k)。用MATLAB 7.0進行仿真,控制器的仿真結果分別如圖7-圖10所示。

圖7 PID控制的方波響應Fig.7 Square wave response of PID control

圖8 精確模型Sm ith-PID控制的方波響應Fig.8 Precise Smith - square wave response of the PID controlmodel
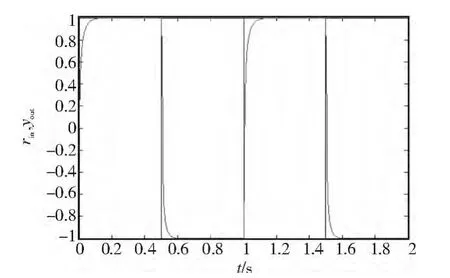
圖9 RBF-Sm ith-PID控制的方波響應Fig.9 RBF-Smith-PID control square wave response
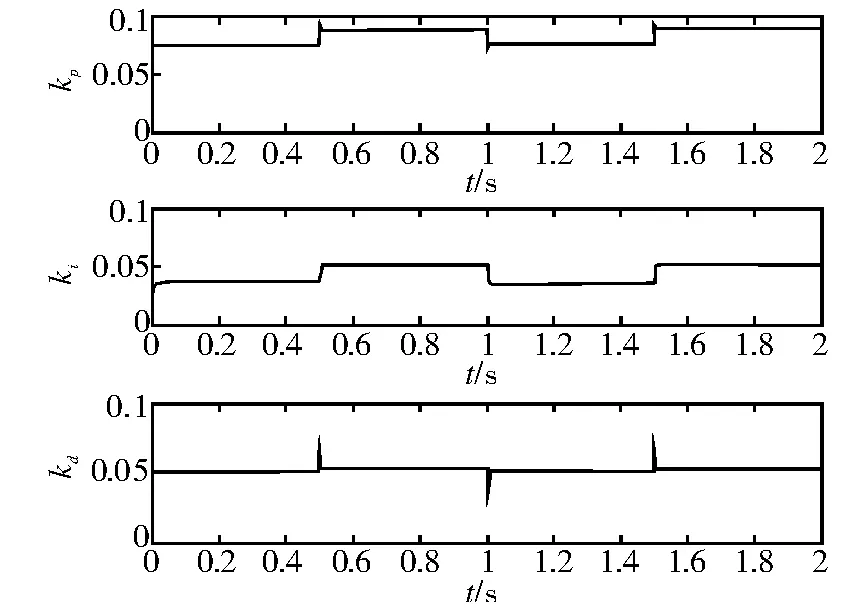
圖10 RBF-Sm ith-PID控制參數自適應整定曲線Fig.10 RBF-Smith-adaptive PID control parameters setting curve
3.3 仿真結果分析
根據仿真結果可見,采用純PID控制,當外界存在擾動時,系統具有較大的超調量,平縫機調速模塊的控制精度變差,現場試驗時會出現抖動現象;當采用精確模型Smith-PID控制時,系統超調量減小,控制效果顯著增強;當采用RBF-Smith-PID控制時,從圖10可知控制參數可以在線整定,系統穩定度和精度高,在進行無級調速時,速度變化平滑,停針和啟針的精度都在要求范圍之類,控制系統更加優越。
4 結論
本文針對平縫機調速模塊的伺服系統是一個多變量、非線性、強藕合、大滯后系統,提出了基于Smith預估補償與RBF神經網絡PID控制算法。該算法利用各算法的優點和互補性,經過理論分析和仿真表明,該算法很好改善了傳統PID在控制過程中不能克服非線性因素的影響、對調節對象的參數不能在線整定等缺點,使該系統調速平滑,具有良好速度跟隨性。
[1]姜建奎.工業平縫機控制器的研究[D],中南大學,2009.
[2]樓彥華.基于DSP的全自動直驅工業縫紉機控制系統研究[D].浙江大學,2010.
[3]唐彪.基于模糊PID的Smith預估控制器[D].中南大學,2010.
[4]王寶忠,宋東鋒.基于Smith預估補償與RBF神經網絡的改進PID控制[J],現代電子技術,2011,34(5):161-165.
[5]飛思科技產品研發中心.神經網絡理論與MATLAB7實現[M].北京:電子工業出版社,2002.18-23.
[6]劉金琨.先進 PID控制及其MATLAB仿真[M].北京:電子工業出版社,2003.104 -111.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
