基于雙坐標系的采煤機截割路徑平整性控制方法
2014-06-07 05:55:03王忠賓劉新華
煤炭學報 2014年3期
關鍵詞:采煤機
周 信,王忠賓,譚 超,劉新華,季 瑞
(中國礦業大學機電工程學院,江蘇徐州 221116)
基于雙坐標系的采煤機截割路徑平整性控制方法
周 信,王忠賓,譚 超,劉新華,季 瑞
(中國礦業大學機電工程學院,江蘇徐州 221116)
針對當前綜采工作面采煤機截割路徑不平整問題,提出一種基于雙坐標系的采煤機截割路徑控制方法。通過對影響采煤機截割路徑平整性的主要因素進行分析,建立了雙坐標系下的采煤機滾筒高度控制模型;為滿足滾筒高度變化的連續性控制要求,設計了基于微分理論的搖臂傾角控制算法;以現場采樣數據為輸入,對采煤機截割路徑控制方法進行仿真,結果顯示:與未使用平整性控制方法之前相比,采煤機前、后滾筒截割路徑上的最大高度差分別減小了93.3%和97.6%,標準偏差分別減小了95.6%和97.2%。因此,提出的方法能夠有效改善采煤機截割路徑的平整性,可對綜采工作面自動化生產提供參考。
采煤機;截割路徑;雙坐標系;平整;微分控制
綜合機械化采煤過程中,采煤機、液壓支架和刮板輸送機等綜采設備隨著工作的推進處于不斷推移的狀態[1-2]。采煤機截割路徑不平整會導致刮板輸送機推移阻力增大、液壓支架支護不到位等問題,容易造成生產中斷,嚴重時還會造成設備損壞和人員傷亡[3-4]。因此,保證采煤機截割路徑的平整性對于提高煤礦生產效率、降低生產風險具有重要的意義[5-6]。
對于采煤機滾筒截割高度調整方法,相關科研人員進行了大量研究。張俊梅等[7-8]致力于開發新型傳感器和新的信息融合算法,以期精確識別煤巖界面,并以此為依據對采煤機滾筒進行實時調高;梁義維等[9-10]研究了基于歷史數據和智能控制算法的滾筒自動調高方法;劉春生等[11-13]對采煤機記憶截割的程控方法進行了控制策略和算法仿真研究;徐志鵬等[14-15]研究了基于模糊控制理論的采煤機滾筒自適應控制方法。雖然對于滾筒調高的研究有很多,但是專門針對采煤機截割路徑平整性控制的方法還不多見。
本文提出了一種基于雙坐標系的采煤機截割路徑平整性控制方法。首先,根據采煤機初始階段的運行參數建立靜態參考坐標系;然后,在采煤機運行過程中,以靜態參考坐標系為參照標準,分析不同動態坐標系下滾筒高度相對靜態參考坐標系的變化關系。最后,根據變化關系和微分理論的連續條件,研究動態運行坐標系中采煤機搖臂傾角的連續性控制方法,從而實現采煤機滾筒自動調高,以滿足采煤機截割路徑的平整性要求。
1 雙坐標系的建立
1.1 靜態參考坐標系
在采煤機動態運行過程中,對截割路徑進行平整性控制的困難之一在于缺少合適的參考標準,本文建立了靜態坐標系作為動態運行坐標系的參考坐標系。靜態參考坐標系傾角參數值的確定可以根據事先測得的煤層傾角確定[16],也可以根據采煤機機載傳感器采集到的數據進行計算,如使用極值法對靜態參考坐標系的傾角參數值θ進行計算:

其中,αi為傳感器采集到的機身傾角值,也可以結合現場實際情況選擇其他計算方法。設某一時刻靜態參考坐標系中的傾角參數值為θ,如圖1所示。
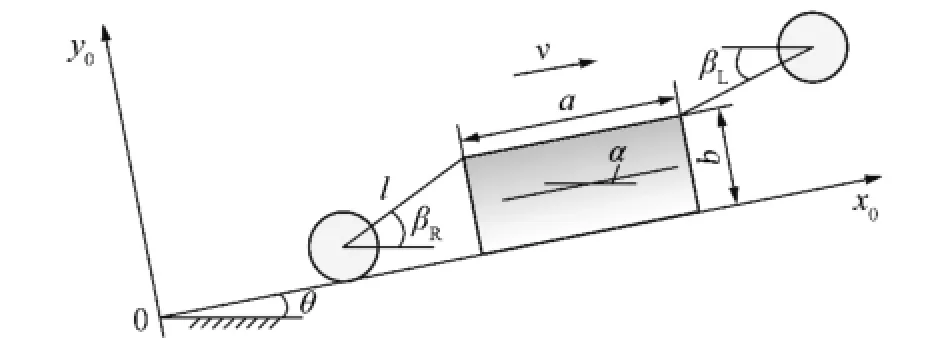
圖1 靜態參考坐標系Fig.1 Staic referential coordinate
如圖1所示,對采煤機幾何參數和傳感參數進行如下定義:a為采煤機機身長度,左、右搖臂與采煤機機身鉸接點中心之間的距離;b為采煤機機身高度,采煤機機身底部到搖臂與機身鉸接點中心之間的距離;l為左右搖臂長度,鉸接點中心和采煤機滾筒中心之間的距離;α為機身傾角,采煤機相對水平面的傾角;βL為左搖臂傾角,左搖臂相對水平面的傾角; βR為右搖臂傾角,右搖臂相對水平面的傾角。
1.2 動態運行坐標系
當機身傾角隨著綜采工作面底板起伏變化時,以采煤機機身傾角變化情況為依據,建立動態運行坐標系,動態運行坐標系的傾角參數值等于當前機身傾角參數值。由于綜采工作面起伏的不確定性,采煤機所在動態坐標系的變化趨勢也是不確定的[17-18]。根據微分控制條件要求,將采煤機所在動態坐標系的變化情況分為以下4種:
(1)動態運行坐標系傾角參數值在小于或等于靜態參考坐標系傾角參數值范圍內變化時,即|αi-1|, |αi|≤|θ|,如圖2(a)所示。
(2)動態運行坐標系傾角參數值在大于或等于靜態參考坐標系傾角參數值范圍內變化時,即|αi-1|, |αi|≥|θ|,如圖2(b)所示。
(3)動態運行坐標系傾角參數值變化前小于靜態參考坐標系傾角參數值,變化后大于靜態坐標系傾角參數值,即|αi-1|<|θ|,|αi|>|θ|,如圖2(c)所示。
(4)動態運行坐標系傾角參數值變化前大于靜態參考坐標系傾角參數值,變化后小于靜態坐標系傾角參數值,即|αi-1|>|θ|,|αi<|θ|,如圖2(d)所示。
圖2(a),(b)所示動態運行坐標系中,采煤機姿態的連續變化可以直接通過微分理論進行控制;圖2(c),(d)所示動態運行坐標系中,采煤機機身傾角的變化過程超出了靜態參考坐標系的傾角參數值范圍,需要將變化過程分成兩個子過程進行控制,分別與圖2(a),(b)所示變化過程相對應。
2 截割過程分析與動態控制方法
2.1 截割過程分析
采煤機截割過程中,機身傾角隨煤層傾角變化而改變,由于搖臂與機身之間存在鉸接關系,滾筒的截割高度也隨之發生改變[19]。下面以采煤機后滾筒為例,分析機身傾角變化對截割路徑的影響。
如圖3所示,采煤機機身傾角由α1變化為α2,采煤機搖臂傾角隨著機身傾角變化由βR1變化為βR2,采煤機滾筒中心位置高度隨著機身傾角變化由hR1變化為hR2。
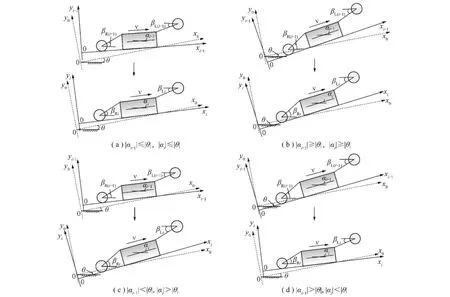
圖2 動態運行坐標系變化過程Fig.2 Changing process of the dynamic running coordinates
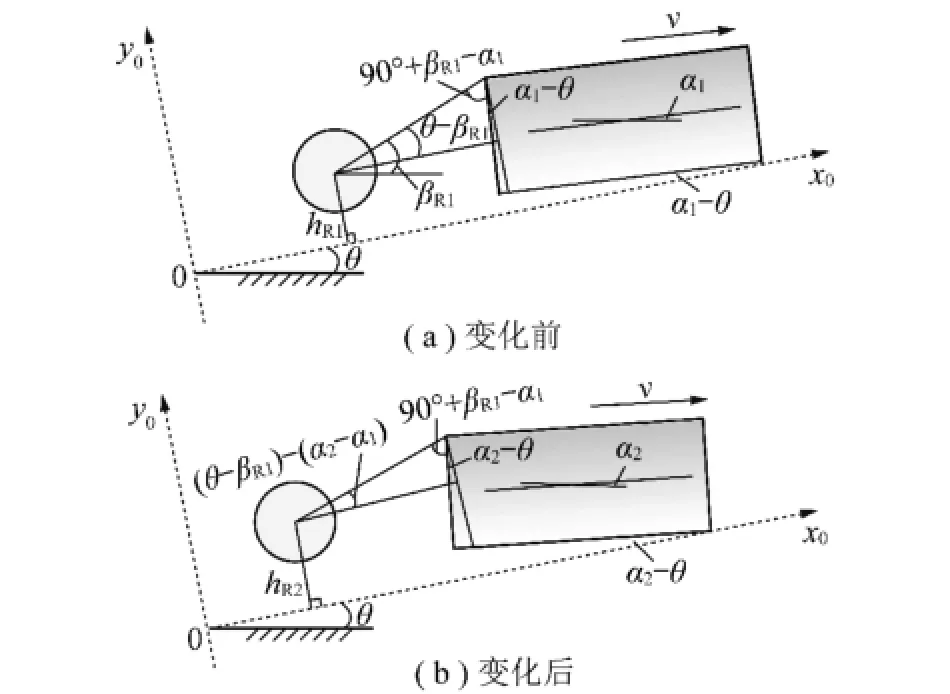
圖3 采煤機后滾筒高度變化過程Fig.3 Height variation process of shearer’s rear drum
圖3(a)中,采煤機后滾筒中心距地面的高度hR1為

圖3(b)中,采煤機機身傾角由α1變化為α2,搖臂與機身之間的夾角保持不變,為90°+βR1-α1。此時,采煤機后滾筒中心距地面的高度hR2為

當采煤機由圖3(a)狀態變化為圖3(b)狀態時,采煤機后滾筒中心距離地面的高度變化ΔhR1為

由圖3(a)和圖3(b)可知,對滾筒中心距離地面高度的計算都是在靜態參考坐標系中進行的,保證了計算結果的一致性。
2.2 連續性微分控制
機身傾角發生變化后,通過調節搖臂角度,使滾筒中心在靜態參考坐標系中的高度保持不變,即無論動態運行坐標系如何變化,都可以以靜態參考坐標系為參照坐標系對處于不同動態運行坐標系中的滾筒高度進行調節,滿足截割路徑平整性要求的目的。對于圖3(b)中因為機身傾角變化產生的高度變化ΔhR1,通過調節搖臂傾角,使得滾筒在靜態參考坐標系中的高度保持不變,如圖4所示。

圖4 調節搖臂傾角后的滾筒高度Fig.4 Height of the shearer’s rear drum with adjusting
當機身傾角由α1變化為α2時,采煤機搖臂傾角隨著機身傾角變化由βR1變化為βR2,調節右搖臂傾角由βR2變化為βTR2,滾筒中心高度隨著右搖臂傾角變化由hR2變化為hTR2。
圖4中,調節后的采煤機滾筒中心距地面高度hTR2為

調節搖臂傾角過程中,采煤機后滾筒中心距離地面的高度變化ΔhR2為

為了獲得較為平整的截割路徑,應滿足:ΔhR1= ΔhR2也即hR1=hTR2:

對于固定的靜態參考坐標系傾角參數值θ,sin θ, cos θ是確定的值,本文中,設sin θ=k1,cos θ=k2。
根據圖3中采煤機所處的位置關系,有:

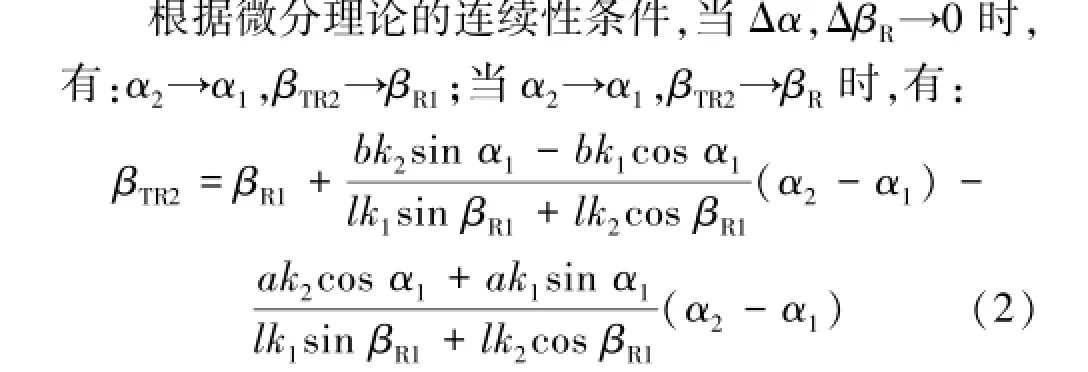
因此,當機身傾角在|α|≤|θ|范圍內變化時,可按照式(2)對搖臂傾角進行實時調節,調整采煤機滾筒截割高度,保持采煤機滾筒截割路徑基本平整。
2.3 動態調節方法
對應采煤機在不同傾角參數區間的變化,其動態調節方法也存在差別。采煤機截割路徑的平整性控制實現過程如圖5所示。

圖5 截割路徑平整性控制流程Fig.5 Dynamic planning flow for the cutting path
根據式(1)的結果計算方法,對處于不同區間變化的調節方法進行類似計算,得出前滾筒搖臂傾角計算方法:

3 實驗驗證
以中國平煤神馬集團股份六礦22210工作面為實驗場所,對現場數據進行采集和分析。在采煤機左、右搖臂和機身內部安裝傾角傳感器,分別測量采煤機左、右搖臂傾角和機身傾角,傾角傳感器安裝位置如圖6所示。
采煤機運行時,以1 Hz的采樣頻率采集采煤機左、右搖臂傾角值和機身傾角值,根據采煤機幾何參數和傳感參數計算出前、后滾筒高度值[20]。在此基礎上,采用本文提出的基于雙坐標系的截割路徑平整性控制方法進行仿真實驗。
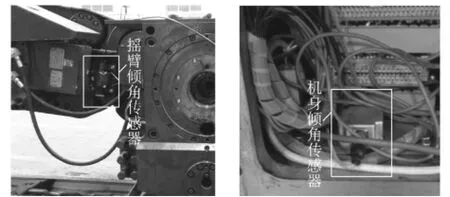
圖6 傾角傳感器安裝Fig.6 Installation of the angle sensors
仿真實驗通過控制采煤機搖臂傾角的變化,補償因機身傾角變化引起的滾筒高度變化,實現以平整性為目的的采煤機截割路徑控制。根據傾角傳感器采集到的機身傾角參數值,得出采樣區間內的機身傾角的最小值為-4.51°,選擇靜態參考坐標系的傾角參數為-4°。對提出的方法進行仿真驗證,采樣范圍內的仿真實驗輸出結果如圖7所示。
對仿真結果進行統計分析得出采煤機截割路徑平整性控制效果見表1。
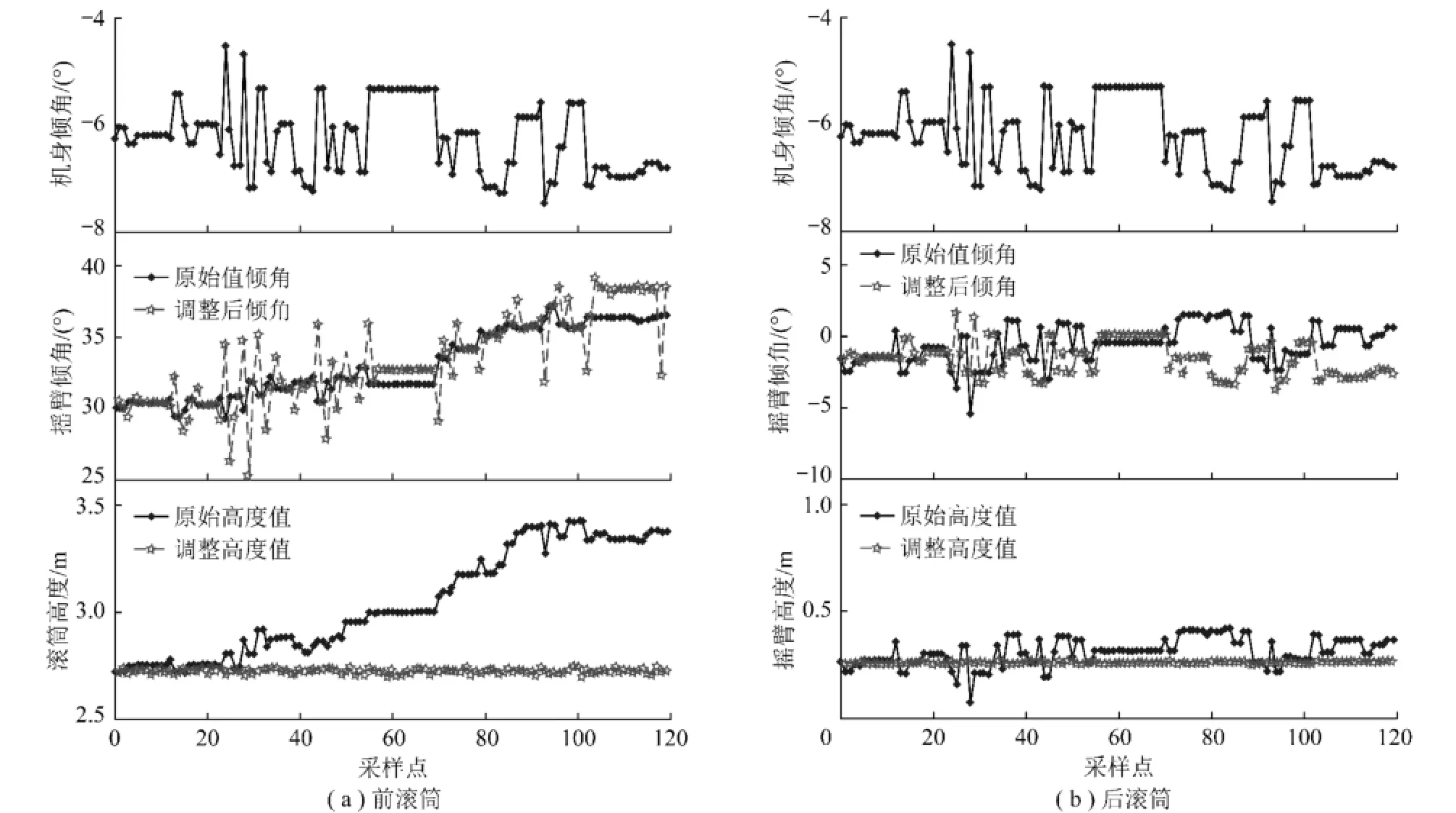
圖7 前、后滾筒仿真結果Fig.7 Simulation results of the front and rear drum

表1 前、后滾筒截割路徑規劃效果Table 1 Cutting path planning results of the frontand rear drum
由統計結果可以看出,使用控制方法前綜采工作面采煤機截割頂板的平整度較差,容易出現頂板支護不到位的情況;底板截割路徑起伏明顯,不利于刮板輸送機設備的推移和液壓支架拉架等動作的實現。使用本文提出的方法對滾筒截割高度進行實時控制后,前滾筒的截割路徑高度差由原來的0.704 m減小為0.047 m,減小了93.3%,標準偏差由原來的0.247 m減小為0.010 m,減小了95.6%;后滾筒的截割路徑高度差由原來的0.343 m減小為0.008 m,減小了97.7%,標準偏差由原來的0.065 m減小為0.002 m,減小了97.2%,有效改善了采煤機截割路徑的平整性。
4 結 論
(1)針對綜采工作面采煤機截割路徑的平整性需求,提出了靜態參考坐標系和動態運行坐標系的概念,并在此基礎上研究了采煤機滾筒高度的微分控制方法。
(2)對影響采煤機滾筒截割高度的因素進行了分析,得出了滾筒高度與采煤機幾何參數及傳感參數之間的關系。
(3)提出了一種截割路徑平整性控制方法,通過實時調節搖臂傾角,對由機身傾角變化引起的滾筒高度變化進行自動補償,并對提出的方法進行了仿真實驗研究。
(4)提出的方法能夠實時修正滾筒的截割路徑,使其保持在相對平緩的變化范圍內,有利于實現支架有效支護,并保證設備推移的順利進行,對于推進綜采自動化的發展具有積極意義。
[1] 徐 剛.綜采工作面配套技術研究[J].煤炭學報,2010,35 (11):1921-1924.
Xu Gang.Study on match technology for fully mechanized longwall coal mining face[J].Journal of China Coal Society,2010,35(11): 1921-1924.
[2] 孫繼平,宋秋爽,王國法.高效綜合機械化采煤成套裝備技術[M].徐州:中國礦業大學出版社,2008:35-45.
[3] Wang Guofa,Ren Huaiwei.New development of sets equipment technologies for coal mine long-wall face in China[J].Journal of Coal Science&Engineering(China),2012,18(3):1-9.
[4] 張世洪.我國綜采采煤機技術的創新研究[J].煤炭學報,2010, 35(11):1898-1902.
Zhang Shihong.Study on the innovation of fully mechanized coal shearer technology in China[J].Journal of China Coal Society, 2010,35(11):1898-1902.
[5] 權國通,譚 超,侯海潮,等.基于粒子群三次樣條優化的采煤機截割路徑規劃[J].煤炭科學技術,2011,39(3):77-79.
Quan Guotong,Tan Chao,Hou Haichao,et al.Cutting path planning of coal shearer based on particle swarm triple spline optimization [J].Coal Science and Technology,2011,39(3):77-79.
[6] Hu Suiyan.Present situation and developing trend of coal mine automation and communication technology[J].Journal of Coal Science and Engineering(China),2008,14(3):489-491.
[7] 張俊梅,范 迅,趙雪松.采煤機自動調高控制系統研究[J].中國礦業大學學報,2002,31(4):415-418.
Zhang Junmei,Fan Xun,Zhao Xuesong.Automatic horizon control system of coal mining machine[J].Journal of China University of Mining&Technology,2002,31(4):415-418.
[8] 任 芳.基于多傳感器數據融合技術的煤巖界面識別的理論與方法研究[D].太原:太原理工大學,2003.
[9] 梁義維.采煤機智能調高控制理論與技術[D].太原:太原理工大學,2005.
[10] 樊啟高,李 威,王禹橋,等.一種采用灰色馬爾科夫組合模型的采煤機記憶截割算法[J].中南大學學報(自然科學版), 2011,42(10):3054-3058.
Fan Qigao,Li Wei,Wang Yuqiao,et al.An algorithm of shearer memory cutting based on grey-Markovian model[J].Journal of Central South University(Science and Technology),2011,42 (10):3053-3058.
[11] 劉春生,荊 凱,楊 秋.采煤機滾筒截割記憶程控的灰關聯度計算新方法[J].煤炭學報2006,31(5):666-669.
Liu Chunsheng,Jing Kai,Yang Qiu.A new grey correlation degree computation method of shearer drum by cutting memory program controlling[J].Jouranl of China Coal Society,2006,31(5):666-669.
[12] 劉春生,荊 凱,楊 秋.采煤機滾筒調高截割記憶程控的控制策略[J].遼寧工程技術大學學報,2007,26(5):751-753.
Liu Chunsheng,Jing Kai,Yang Qiu.Control strategy of sample intervals of cutting memory program controlling for shearer drum[J].Journal of Liaoning Technical University,2007,26(5):751-753.
[13] 劉春生,楊 秋,李春華.采煤機滾筒記憶程控截割的模糊控制系統仿真[J].煤炭學報,2008,33(7):822-825.
Liu Chunsheng,Yang Qiu,Li Chunhua.Simulation of shearer drum cutting with memory program controlling by fuzzy control[J].Journal of China Coal Society,2008,33(7):822-825.
[14] 徐志鵬,王忠賓,米金鵬.采煤機自適應記憶切割[J].重慶大學學報,2011,34(4):134-140.
Xu Zhipeng,Wang Zhongbin,Mi Jinpeng.Shearer self-adaptive memory cutting[J].Journal of Chongqing University,2011, 34(4):134-140.
[15] 徐志鵬.采煤機自適應截割關鍵技術研究[D].徐州:中國礦業大學,2011.
Xu Zhipeng.Study on the key technologies of self-adaptive cutting for shearer[D].Xuzhou:China University of Mining and Technology,2011.
[16] 伍永平,員東風,張淼豐.大傾角煤層綜采基本問題研究[J].煤炭學報,2000,25(5):465-468.
Wu Yongping,Yuan Dongfeng,Zhang Miaofeng.Study on the elementary problems of full mechanized coal mining in greater pitching seam[J].Journal of China Coal Society,2000,25(5):465-468.
[17] 李曉豁,李燁鍵,劉述明,等.基于預測控制的采煤機滾筒自動調高系統[J].計算機系統應用,2012,21(4):36-40.
LiXiaohuo,Li Yejian,Liu Shuming,et al.Automatic adjusting height system of shearer drum based on predictive control[J].Computer System Application,2012,21(4):36-40.
[18] 石建軍,施皓宇,包壽勝,等.大傾角綜采工作面液壓支架參數設計及其與圍巖關系[J].煤炭學報,2012,37(2):313-318.Shi Jianjun,Shi Haoyu,Bao Shousheng,et al.The hydraulic support parameter design in lean coal seam and numerical simulation about the relation hydraulic support and surround rock[J].Journal of China Coal Society,2012,37(2):313-318.
[19] 王忠賓,徐志鵬,董曉軍.基于人工免疫和記憶截割的采煤機滾筒自適應調高[J].煤炭學報,2009,34(10):1405-1409.
Wang Zhongbin,Xu Zhipeng,Dong Xiaojun.Self-adaptive adjustment height of the drum in the shearer based on artificial immune and memory cutting[J].Journal of China Coal Society,2009, 34(10):1405-1409.
[20] 蘇秀平,李 威,樊啟高.采煤機滾筒調高滑模變結構控制策略[J].煤炭學報,2012,37(12):2107-2111.
Su Xiuping,Li Wei,Fan Qigao.A shearer drum height adjusting strategy using sliding-mode variable structure control[J].Journal of China Coal Society,2012,37(12):2107-2111.
A smoothness controlling method for the cutting path of the shearer based on the double-coordinators
ZHOU Xin,WANG Zhong-bin,TAN Chao,LIU Xin-hua,JI Rui
(School of Mechatronic Engineering,China University of Mining and Technology,Xuzhou 221116,China)
Aiming at the problem that the shearer cutting path was not smooth on the fully mechanized face,a smoothness controlling method based on double-coordinators was proposed.The main factors which affect the smoothness of the shearer cutting path were analyzed and the control model for the shearer drum height under double-coordinators was established.Moreover,a control algorithm for rocker inclination based on differential theory was designed in order to satisfy the continuous controlling requirement of the drum height.Finally,sample data from an experiment were provided as system input and the proposed method was simulated.The simulation results show that the largest gaps of the front drum height and the rear drum height reduced by 93.3%and 97.6%respectively compared with the gaps without the application of the smoothness controlling method.Accordingly,the standard deviation reduced by 95.6%and 97.2%.Thus,the smoothness of shearer cutting path can be improved effectively and the proposed method has important significance to promoting the development of fully mechanized automation.
shearer;cutting path;double-coordinators;smoothness;differential controlling
TD421.6;TP273
A
0253-9993(2014)03-0574-06
周 信,王忠賓,譚 超,等.基于雙坐標系的采煤機截割路徑平整性控制方法[J].煤炭學報,2014,39(3):574-579.
10.13225/j.cnki.jccs.2013.0429
Zhou Xin,Wang Zhongbin,Tan Chao,et al.A smoothness controlling method for the cutting path of the shearer based on the double-coordinators[J].Journal of China Coal Society,2014,39(3):574-579.doi:10.13225/j.cnki.jccs.2013.0429
2013-04-07 責任編輯:許書閣
國家高技術研究發展計劃(863)重點資助項目(2013AA06A411);國家自然科學基金資助項目(51005231);江蘇省青藍工程資助項目
周 信(1987—),男,江蘇揚州人,博士研究生。Tel:0516-83690758,E-mail:cumtzhouxin@gmail.com
猜你喜歡
防爆電機(2022年1期)2022-02-16 01:14:06
河北畫報(2021年2期)2021-05-25 02:07:50
機械管理開發(2020年4期)2020-06-10 13:40:40
煤礦機電(2019年6期)2020-01-13 05:12:44
電子技術與軟件工程(2019年15期)2019-12-03 07:04:37
山東煤炭科技(2018年2期)2018-12-06 03:55:04
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
機電信息(2015年27期)2015-02-27 15:57:16
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18
