變后掠變展長飛行器動力學建模與動態響應分析
2014-06-27 05:41:20楊貫通唐勝景趙林東郭杰
兵工學報 2014年1期
關鍵詞:變形
楊貫通,唐勝景,趙林東,郭杰
(北京理工大學飛行器動力學與控制教育部重點實驗室,北京 100081)
變后掠變展長飛行器動力學建模與動態響應分析
楊貫通,唐勝景,趙林東,郭杰
(北京理工大學飛行器動力學與控制教育部重點實驗室,北京 100081)
飛行器機翼后掠角和展長動態變化時,氣動力、轉動慣量、壓力中心和質心等關鍵參數都發生劇烈變化。基于Newton-Euler方法建立了包含5個剛體的變后掠變展長飛行器的動力學模型,推導了由于變形所產生的附加氣動力和氣動力矩。在縱向上解耦簡化了動力學方程,基于準定常氣動力模型,分析了不同變形形式和變形速度下的縱向動態響應。研究結果表明,后掠角和展長的變化對動力學特性影響較大,但不同的變化速度對結果影響不大。通過合適的變形方式和變形速度的結合可以弱化變形過程中的動力學參數波動,減小控制系統的負擔。
應用力學;無人機;變后掠變展長;動力學建模;動態響應
0 引言
傳統的飛行器最優功能和性能往往只是體現在某些特定的飛行任務和飛行狀態上。變氣動外形飛行器能夠滿足大空域和大速域的飛行要求,可以在多種飛行狀態下保持最優飛行,使得該飛行器能夠執行常規飛行器所不能完成的任務[1-2]。William提煉出了在變形飛機概念設計階段最為關鍵的6個變量:推重比、翼載、翼厚度與弦長比、翼根梢比、翼后掠角、翼展弦比[3]。變后掠變展長無人飛行器綜合了翼后掠角和翼展弦比二種大尺度變形方式,是可變外形飛行器的一個重要研究方向。
對于變外形無人飛行器,氣動外形改變是一個關鍵的飛行過程,在變形過程中飛行器的質量特性、氣動特性都發生顯著變化,需要對該過程進行詳細的建模和分析,把握關鍵參數的變化規律,為控制系統設計提供依據。在變后掠變展長飛行器方面,已有一些氣動特性研究成果[4],動力學研究還比較少見;在變外形飛行器動力學建模和動態響應分析方面,已有對變后掠飛機以及折疊飛機等有意義的研究[5-8]。
1 變后掠變展長無人飛行器
在某原型無人機(如圖1所示)的基礎上,設計了后掠角和展長均可變的無人飛行器。特殊的氣動外形使其能夠實現偵察和打擊一機融合,實現自主空中偵察、戰場監視、戰場決策和打擊等任務。其3種典型的飛行狀態如圖2所示。

圖1 作為基準模型的小型無人機Fig.1 The referential UAV

圖2 3種典型飛行狀態Fig.2 Typical flight states
2 多體動力學建模
變外形飛行器是一個空間運動的多體系統,傳統的6自由度飛行器動力學模型不再適用,需要基于多體動力學建模方法重新推導動力學方程。
2.1 坐標系的建立
變外形飛行器一般有3個特征點可以選作坐標系原點:總質心、機體質心和飛機頭部。由于總質心是變化的,坐標系也會在飛行器上運動,增加了建模難度;飛機頭部作為原點,會直接增加力矩項,使建模過程變得復雜。而機體坐標系原點選在機身質心上,建模最為直觀和簡潔。在變形之前,即0°后掠角時,整個無人機的總質心與機身的質心重合。變形時,飛機質心位置和坐標系原點不再重合,并且隨后掠角和展長的變化在空間運動,將產生附加動力和力矩。為方便研究,將可變后掠翼和伸縮翼的質量集中于其質心。
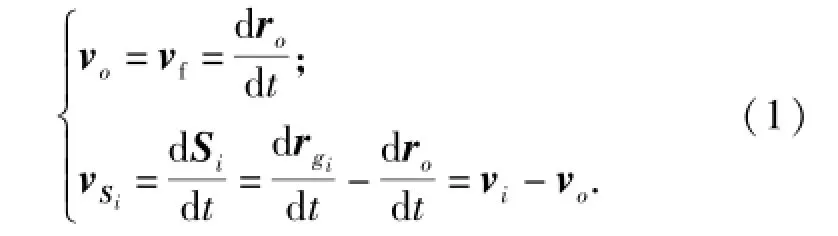
如圖3所示,OXYZ為機體坐標系,Oxyz為地面坐標系。地面坐標系到機體坐標系的矢徑為ro,gi點為單個可活動機翼的質心。機體坐標系原點到gi點的矢徑為Si,地面坐標系到gi點的矢徑為rgi.用下標f表示機身,下標1表示左后掠翼,2表示右后掠翼;3表示左伸縮翼,4表示右伸縮翼。對機身和機翼易得速度矢量(1)式。
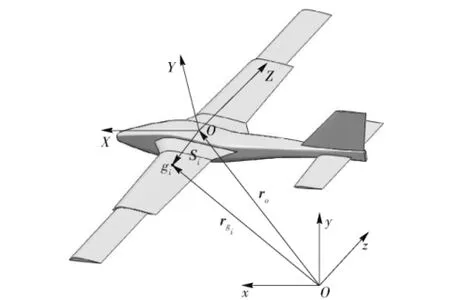
圖3 坐標系示意圖Fig.3 Coordinate system
2.2 平動動力學
對機身、4片機翼分別列寫動量定理
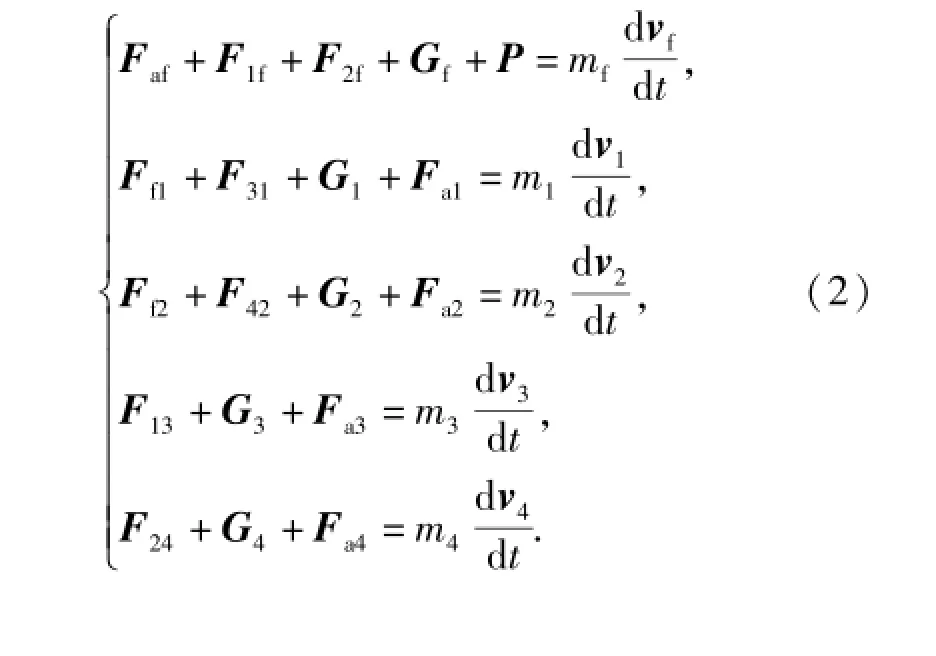
式中:Faf表示空氣動力對機身的作用力;F1f表示左側后掠翼對機身的作用力;G1代表左側后掠翼的重力;P代表發動機推力;其他類推。整理(2)式并根據(1)式得到

式中:m是總質量;G是總重力。可以發現與傳統飛行器6自由度方程相比,該方程多了等式右側機翼運動附加力。進一步推導得到
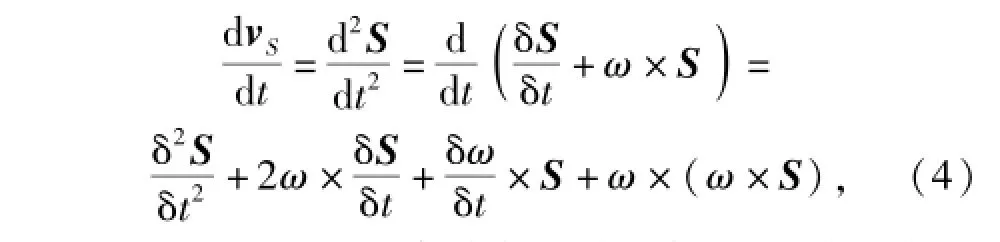
式中:ω為飛行器的旋轉角速度,將ω連同S表示成機體坐標系內的向量形式,帶入(4)式可得到附加力。需要注意,該力是表示在機體坐標系下的。
2.3 轉動動力學
對第i塊機翼,根據動量矩定義[9]知

式中:上標*表示機翼上的單位微元。
直接對兩側求導得到
整理之后得
(10)式等式左側除Ma為飛行器受到的氣動力矩,其余均是附加力矩項。
3 縱向動力學模型
3.1 縱向動力學模型
兩側對稱變形時,由于左右兩側具有運動的一致性和對稱性,易得

此時附加力和附加力矩可以按后掠翼和伸縮翼分為2組。根據(11)式對力和力矩方程進行簡化,得到由后掠翼引起的機體坐標系OX軸、OY軸上的附加力

由后掠翼引起的關于Z軸的附加力矩為
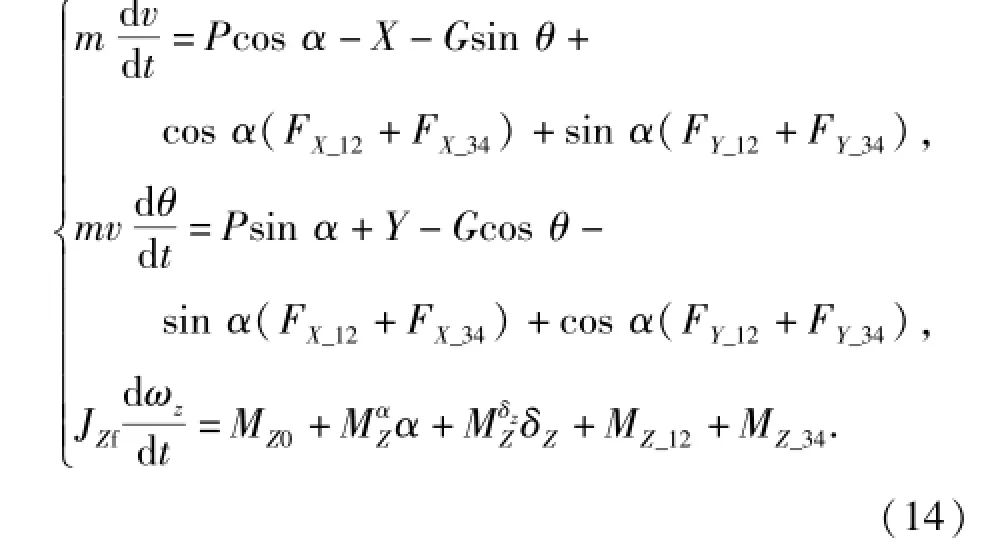
vX、vY為速度在機體坐標系上的投影。最終得到變后掠變展長飛行器縱向動力學方程
3.2 幾何關系
飛行器的幾何關系如圖4所示。
由圖4易知以下幾何關系

式中:a、b是與外形有關的定值;后掠角χ和伸縮展長l均是控制量。(12)式中所需的對時間一階和二階導數均易導出。
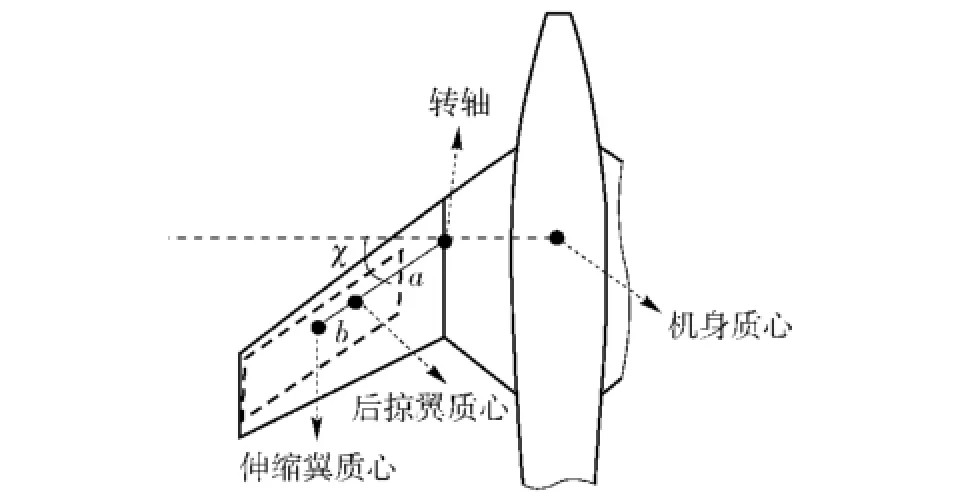
圖4 幾何關系示意圖Fig.4 The geometric relationship
4 動態響應仿真與分析
對變形過程進行動力學仿真,變形之前飛行器處于定直平飛狀態,主要參數列于表1.變形過程中采用準定常氣動力計算。
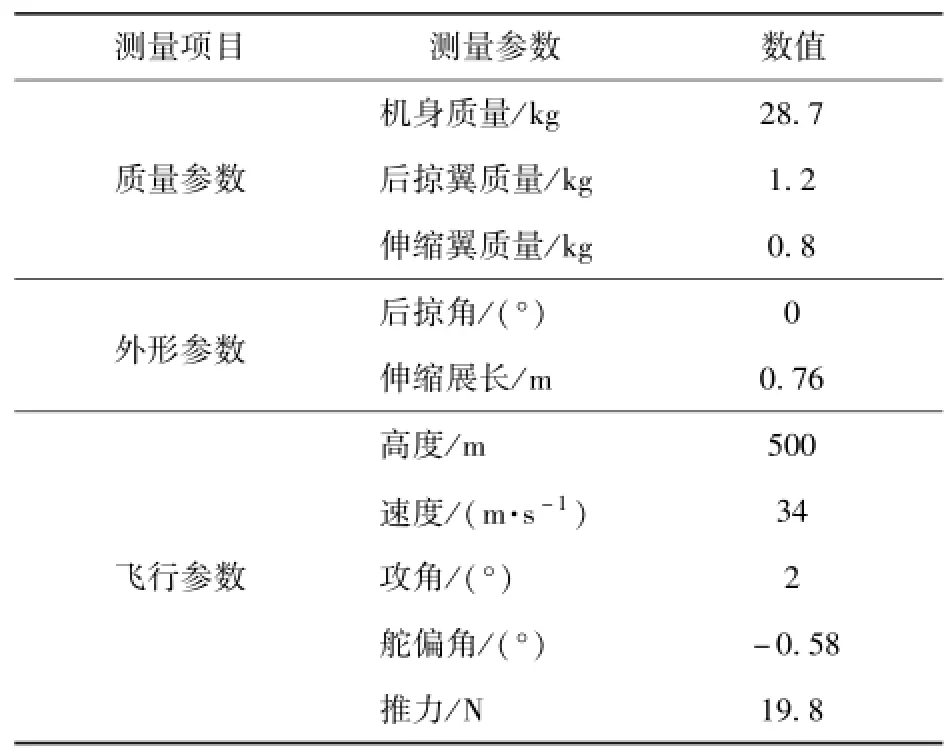
表1 平飛主要參數Tab.1 Parameters of straight flight
4.1 不同后掠角變化時的動態響應
保持飛行器的展長不變,后掠角分別以4°/s、8°/s、10°/s的速度變化,得到的后掠角、高度、速度、攻角和俯仰角速度等運動參數的動力學響應如圖5所示。
從圖5可以看出,由于后掠角的增加,導致氣動焦點、壓心均劇烈后移,使得氣動力產生的低頭力矩迅速增加,滾轉角速度增加,俯仰角減小,但彈道傾角變化相對緩慢,進而導致飛行器的攻角迅速降低。隨著后掠角的增加,展弦比減小,升力系數顯著降低,飛行器開始迅速掉高。注意到附加力矩是抬頭力矩,可知變形過程實際是氣動特性與質量特性的博弈,但氣動參數的變化更加劇烈,因此飛行器低頭趨勢占據了主導,同時需注意在設計時考慮放寬靜穩定性。從圖中還可以看出,后掠角變化速率快時,使得各參數的變化趨勢提前發生,但總體影響不顯著。
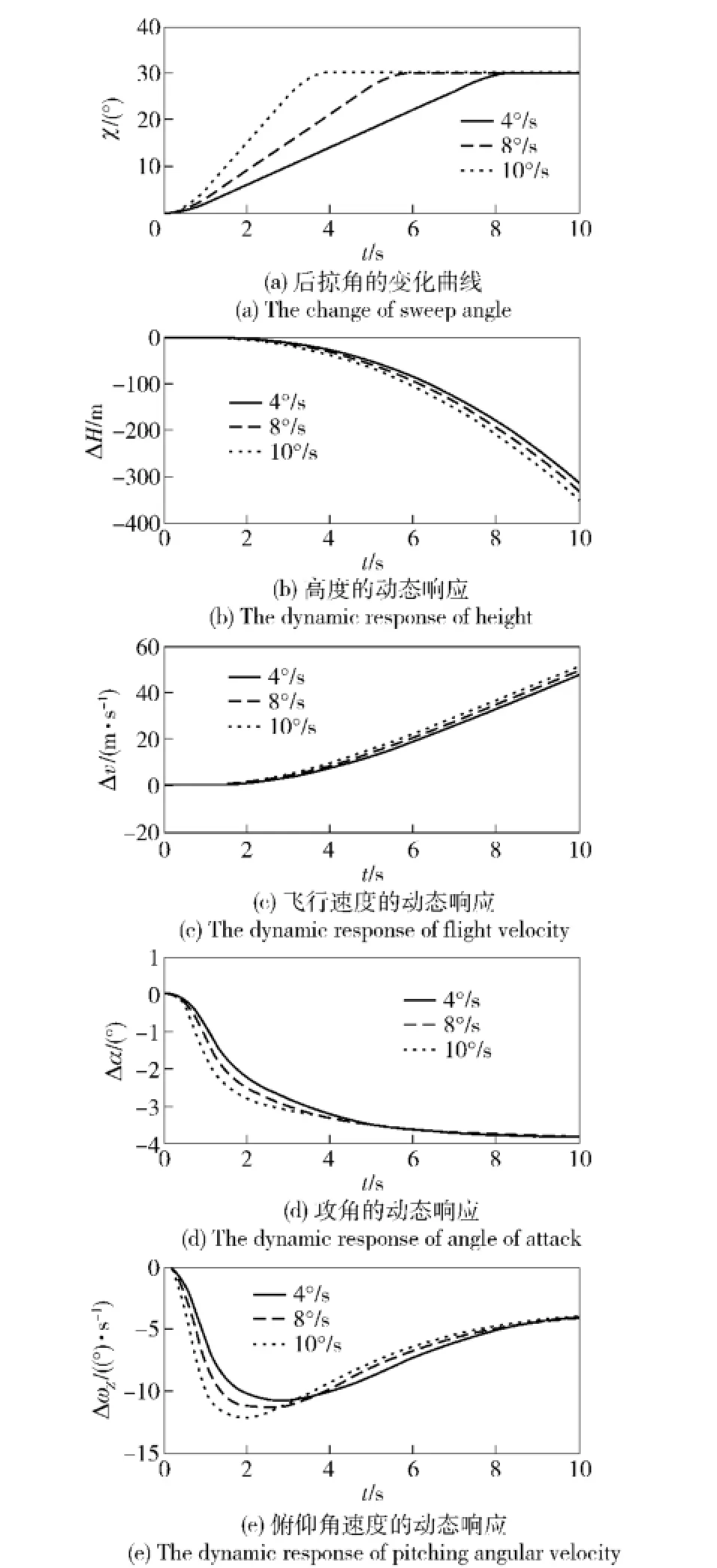
圖5 不同后掠角變化速率下的動態響應Fig.5 The dynamicre sponses at different morphingspeeds of sweep angle
4.2 不同展長變化時的動態響應
保持飛行器的后掠角不變,展長分別以0.2 m/s、0.3 m/s、0.5 m/s的速度變化,得到的伸縮翼展長、高度、速度、攻角和俯仰角速度等運動參數的動力學響應如圖6所示。
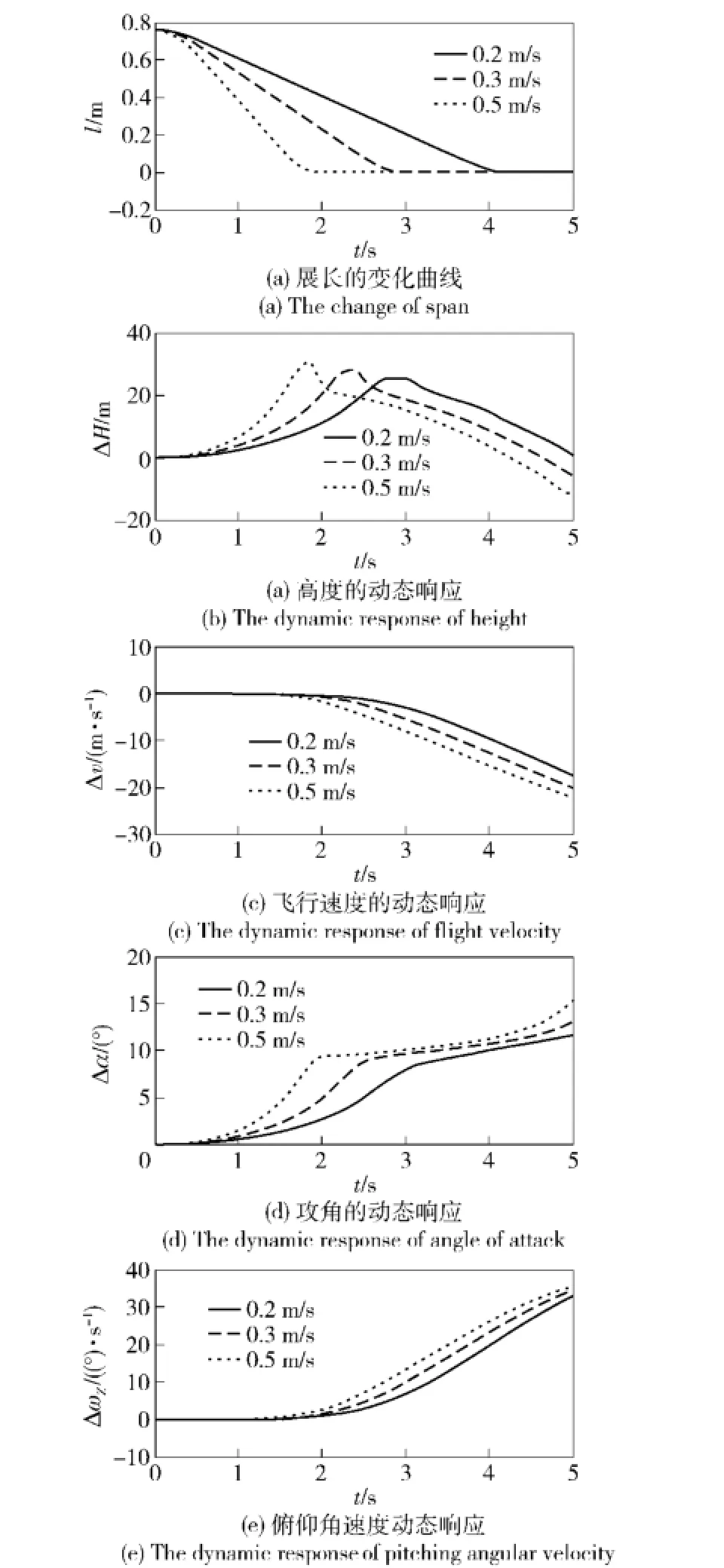
圖6 不同展長變化速率下的動態響應Fig.6 The dynamic responses at different morphingspeeds of span
從圖6可以看出,由于展長的減小,飛行器呈現先增高后掉高的過程。主要因為在0°后掠角狀態展長變化時,質心位置不發生改變,氣動作用中心變化也不顯著,但此時由于零升力矩系數的減小,導致飛行器呈現緩慢的抬頭趨勢,俯仰角速度緩慢增加,進而導致攻角增加。由于推力不夠,速度持續降低,升力減小,隨后飛行器開始掉高,飛行軌跡進入長周期的高度方向震蕩衰減過程。同時從圖中看出,相較于后掠角,動力學參數對展長的變化速率相對敏感。但增加展長的變化速率不會帶來惡劣影響,這對于使用展長的變化來控制飛行器姿態而言很有意義。
4.3 展長和后掠角同時變化時的響應
后掠角和展長同時改變,變化速度為4組,分別為:6°/s,0.3 m/s;6°/s,0.5 m/s;8°/s, 0.3 m/s;8°/s,0.5 m/s.得到的高度、速度、攻角和俯仰角速度等各運動參數的動力學響應如圖7所示。
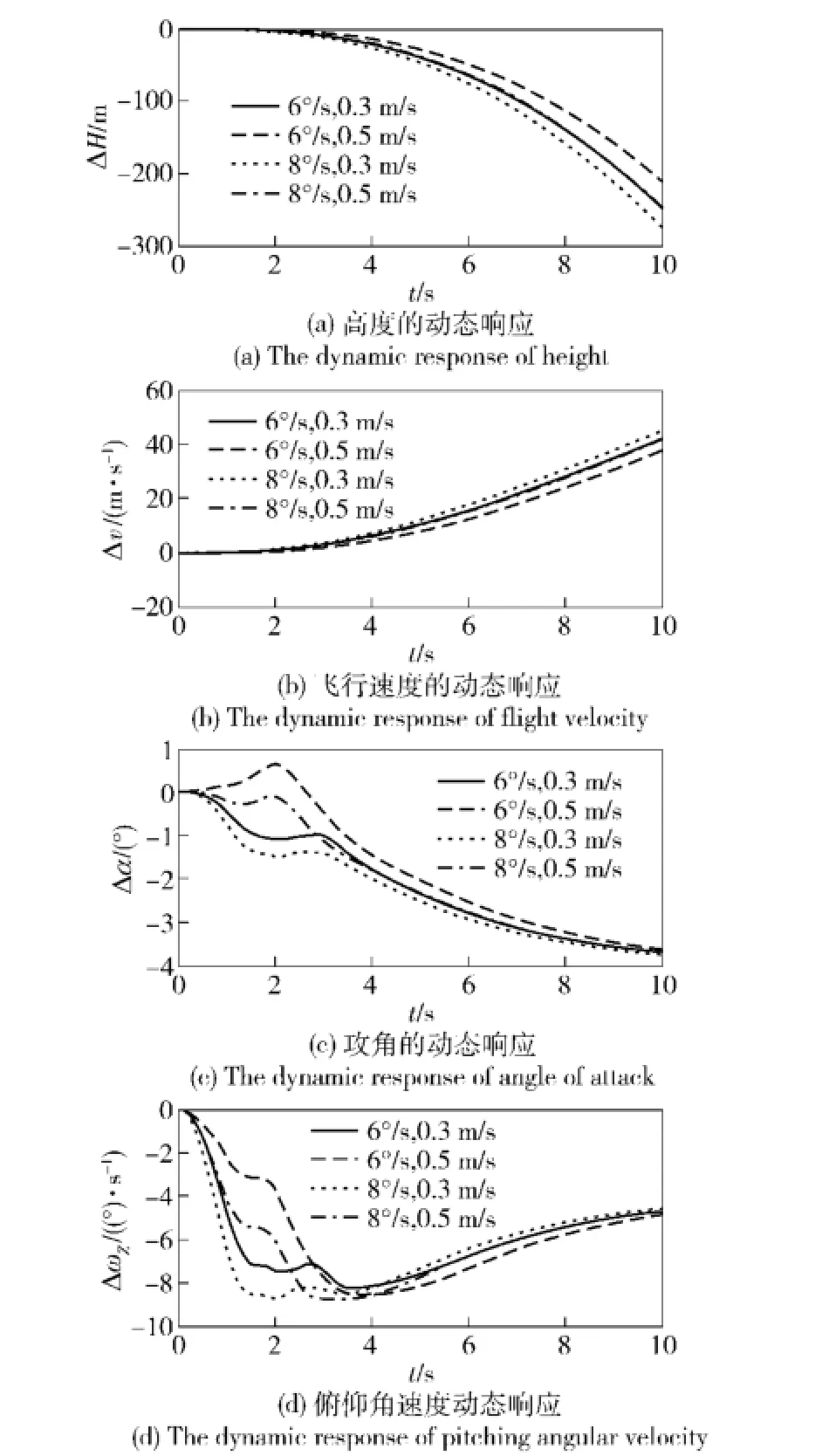
圖7 不同后掠角和展長變化速率下的動態響應Fig.7 The dynamicre sponses at different morphing speeds of sweep and span
從圖7可以看出,當后掠角和展長同時變化時,后掠角對動態特性的影響占據主導,但是展長的變化對結果起到了平衡和緩和的作用,進而可知通過合適的變形方式和變形速度的結合可以弱化變形過程中的動力學參數波動。
5 結論
本文基于Newton-Euler方法建立了變后掠變展長無人飛行器的多體動力學模型,推導了由變展長和變后掠角所產生的附加力和力矩項。在縱向上解耦簡化了動力學方程,基于準定常氣動力模型,分析了不同變形形式和變形速率下的飛行器縱向動態響應。仿真結果表明,后掠角和展長的變化對動力學特性影響較大,但變化速度對結果影響不大。通過合適的變形方式和變形速度的結合可以弱化變形過程中的動力學參數波動,進而減小控制系統的負擔。
References)
[1] Vasista S,Tong L Y,Wong K C.Realization of morphing wings: a multidisciplinary challenge[J].Journal of Aircraft,2012, 49(1):11-28.
[2] Smith K,Butt J,Von Spakovsky M R.A study of the benefits of using morphing wing technology in fighter aircraft systems[C]∥Proceedings of the 39th AIAA Thermophysics Conference.Miami, Florilia,US:AIAA,2007:25-28.
[3] William A.Crossley.Morphing aircraft sizing using design optimization[J].Journal of Aircraft.2011,48(2):612-622.
[4] 陳錢,尹維龍,白鵬,等.變后掠變展長翼身組合體系統設計與特性分析[J].航空學報,2010,31(3):506-513.
CHEN Qian,YIN Wei-long,BAI Peng,et al.System design and characteristics analysis of a variable-sweep and variable-span wingbody[J].Acta Aeronautica ET Astronautica Sinica,2010, 31(3):506-513.(in Chinese)
[5] Mestrinho J,Gamboa P,Santos P.Design optimization of a variable-span morphing wing for a small UAV[C]∥52nd AIAA/ ASME/AHS/ASC Structures,Structural Dynamics and Materials Conference.Denver,Colorado:AIAA,ASME,ASCE,AHS, ASC,2011:4-7.
[6] An J G,Yan M,Zhou W B,et al.Aircraft dynamic response to variable wing sweep geometry[J].Journal of Aircraft,1988, 25(3):216-221.
[7] 樂挺,王立新,艾俊強.Z型翼變體飛機的縱向多體動力學特性[J].航空學報,2010,31(4):679-686.
YUE Ting,WANG Li-xin,AI Jun-qiang.Longitudinal multibody dynamic characteristics of Z-wing morphing Aircraft[J]Acta Aeronautica ET Astronautica Sinica,2010,31(4):679-686. (in Chinese)
[8] Henry J J,Pines D J.A mathematical model for roll dynamics by use of a morphing-Span Wing[C]∥48th AIAA/ASME/AHS/ ASC Structures,Soructural Dynamics,and Materials Conference. Honolulu,Hawaii:AIAA,ASME,ASCE,AHS,ASC,2007:23-26.
[9] Fossen T I.Guidance and control of ocean vehicles[M].US: John Wiley&Sons Inc,1994:25-28.
Dynamic Modeling and Response of a Morphing UAV with Variable Sweep and Variable Span
YANG Guan-tong,TANG Sheng-jing,ZHAO Lin-dong,GUO Jie
(Key Laboratory of Dynamic and Control of Flight Vehicle,Ministry of Education,Beijing Institute of Technology,Beijing 100081,China)
For morphing flight vehicles,the changes of sweep angle and span have great influence on key parameters such as aerodynamic forces,inertial moments,pressure center and gravity center.A dynamic model of morphing vehicle with variable sweep and span is established based on Newton-Euler method. The additional force and moment generalized by morphing are deduced.The dynamic response aroused by morphing is studied using decoupled longitudinal equations and quasi-steady aerodynamic model.The results indicate that the changes of sweep and span influence the dynamic characteristics severely;however,the effect of different morphing speed is not remarkable.Appropriate strategy of morphing could weaken the fluctuation of dynamic parameters and relieve the burden of control system.
applied mechanics;UAV;variable sweep and variable span;dynamic modeling;dynamic response
V212.1
:A
1000-1093(2014)01-0102-06
10.3969/j.issn.1000-1093.2014.01.015
2013-04-22
航空科學基金項目(2012ZA72002)
楊貫通(1986—),男,博士研究生。E-mail:ygt@bit.edu.cn;
唐勝景(1959—),男,教授,博士生導師。E-mail:tangsj@bit.edu.cn
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
