基于雙重卡爾曼濾波器電池荷電狀態(tài)的估計
2014-06-27 05:46:35商高高朱晨陽
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2014年6期
商高高,朱晨陽
(江蘇大學(xué)汽車與交通工程學(xué)院,江蘇鎮(zhèn)江 212013)
基于雙重卡爾曼濾波器電池荷電狀態(tài)的估計
商高高,朱晨陽
(江蘇大學(xué)汽車與交通工程學(xué)院,江蘇鎮(zhèn)江 212013)
為了有效估計車用蓄電池的荷電狀態(tài)(SOC),建立了包含遲滯因素和松弛因素的鋰電池的精確模型,以自適應(yīng)無跡卡爾曼濾波器算法為基礎(chǔ),設(shè)計了能夠?qū)崿F(xiàn)模型參數(shù)和狀態(tài)同時在線估計的雙重卡爾曼濾波器。通過實驗和仿真結(jié)果的比較表明:該方法能夠有效抑制噪聲的干擾,快速修正SOC的誤差,取得精確的SOC估計值,同時通過時變參數(shù)的估計為判斷蓄電池的健康狀態(tài)提供依據(jù)。
荷電狀態(tài);卡爾曼濾波器;自適應(yīng)
電池的荷電狀態(tài)(state of charge,SOC)是蓄電池的重要性能指標(biāo)。它表示蓄電池可充放電的能力,其準(zhǔn)確估計對于電動汽車能量的合理分配和再生利用有著重大意義。
目前,普遍使用的SOC估計方法有安時計量(Ah)結(jié)合開路電壓(OCV)的方法[1]、支持向量機法[2]和卡爾曼濾波法[3,4]。其中,安時法易受SOC初始誤差的影響而產(chǎn)生累積誤差;開路電壓法不能滿足汽車行駛工況的實時性要求;支持向量機法對硬件的要求較高且受訓(xùn)練數(shù)據(jù)的影響較大;傳統(tǒng)的卡爾曼濾波法無法保證在整個電池壽命期間SOC的估計精度。本文在建立精確的電池模型的基礎(chǔ)上,設(shè)計了能夠同時在線估計電池模型參數(shù)和SOC的雙重卡爾曼濾波器,從而在電池整個壽命期間均能穩(wěn)定、精確地估計電池SOC。
1 蓄電池模型的建立
卡爾曼濾波器是以狀態(tài)空間方程為基礎(chǔ),通過遞推算法實現(xiàn)狀態(tài)的最小方差估計。因此,建立一個精確的電池模型是實現(xiàn)卡爾曼濾波器在線估計電池SOC的前提。該模型要求既能反映電池的各種特性,又能兼顧處理器的運算速度。
目前,常用的電池建模方法有電化學(xué)模型、電阻抗模型、等效電路模型。每種方法都有自身的適用范圍。由于本文是針對電池在電動汽車的特殊環(huán)境下的SOC估計,所以必須滿足一些特殊的要求,主要包括:較高的充放電電流、較大的電流變化速率、溫度變化范圍大(從-30℃到+50℃)、充放電交替出現(xiàn)的可能等。另外,在電動汽車中,能夠直接測量的電池信號很少,只有電流、電壓、溫度等,并且電池的性能受電池的電化學(xué)結(jié)構(gòu)的限制。綜合考慮,本文最終使用基于等效電路的模型,但不同的是,文中將SOC作為系統(tǒng)狀態(tài)而不是開路電壓(OCV),然后通過合理設(shè)計卡爾曼濾波器直接得到SOC的估計值[5]。電池模型如式(1)所示。
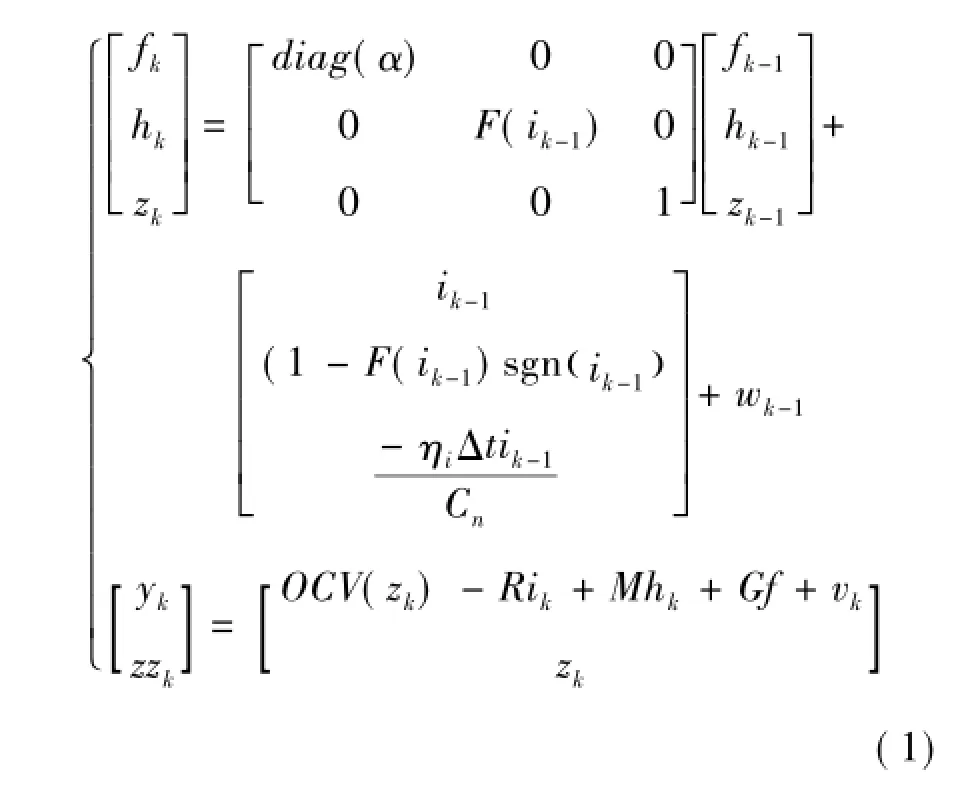

式(1)中的fk為低通濾波器,用來表示電池中的松弛因素。松弛因素是指如果一個電池經(jīng)歷的是脈沖電流,那么只有在一定時間后它才會收斂到穩(wěn)定狀態(tài)的點,并且這些時間常數(shù)可以通過電流ik的低通濾波器表示出來;Δt為采樣時間間隔;α為低通濾波器的極點;diag(α)為低通濾波器極點組成的對角線矩陣;ik為kΔt時刻電流(放電時為正,充電時為負(fù));hk為電池的遲滯因素,遲滯是指輸入信號周期性變化的時候,輸出為非周期變化,在電池中的表現(xiàn)為利用極小的電流對電池進(jìn)行充放電時電池的端電壓并不能完全重合;η為電池庫侖效率;r為正數(shù),用來調(diào)整衰減的速率; Cn為電池的標(biāo)稱容量;zk為kΔt時刻的SOC值;wk為系統(tǒng)過程噪聲;yk為電池端電壓;OCV(zk)為電池開路電壓;R為電池歐姆內(nèi)阻;M為由遲滯引起的最大極化值;G表示低通濾波器的輸出矩陣;vk為系統(tǒng)的測量噪聲;zzk為SOC的粗略估計值,它可以通過測量電池的電壓、電流和估計得到內(nèi)阻,利用OCV-SOC曲線,通過查表的方式得到。為了保證在SOC估計過程中所有的參數(shù)具有真實的物理意義,zk表達(dá)式為

為了使得等式在充、放電過程中都能保持穩(wěn)定,sgn(ik)表達(dá)式為
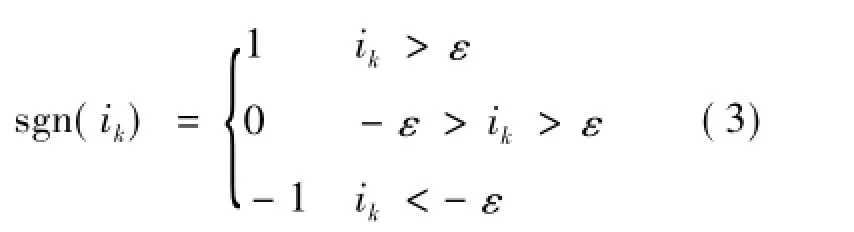
式(3)中,ε指非常小的正實數(shù)。
2 雙重卡爾曼濾波器的設(shè)計
2.1 卡爾曼濾波器簡介
1960 年,美籍匈牙利數(shù)學(xué)家卡爾曼將狀態(tài)空間分析方法引入到濾波理論中,對狀態(tài)和噪聲進(jìn)行了統(tǒng)一的描述,得到時域上的遞推濾波算法,即卡爾曼濾波,相應(yīng)的算法稱為卡爾曼濾波器[6]。經(jīng)典的卡爾曼濾波器(KF)在初始化完成后,只需不斷重復(fù)時間更新和測量更新就能完成狀態(tài)值的不斷更新。圖1表示卡爾曼濾波器的工作原理。
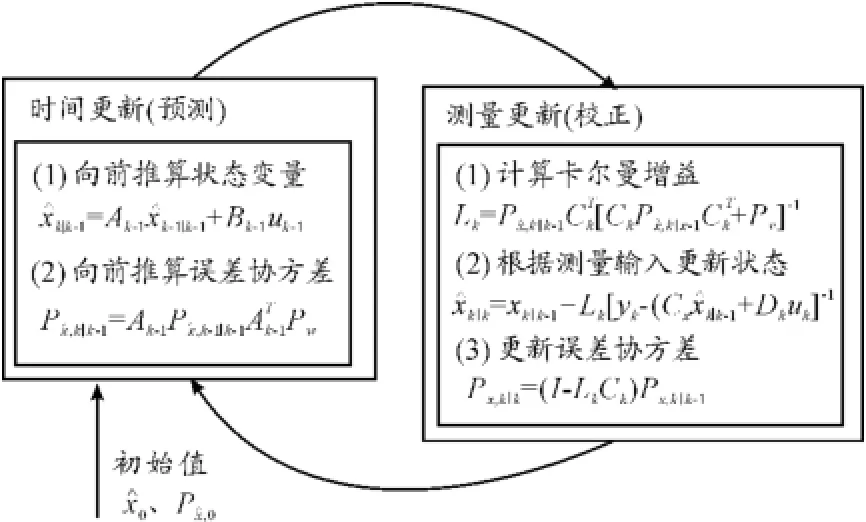
圖1 卡爾曼濾波器的工作原理
由于在實際應(yīng)用時,多數(shù)情況下需要處理的系統(tǒng)為非線性的(如電池SOC估計模型),所以卡爾曼濾波器又衍生出了針對非線性系統(tǒng)的算法,主要有擴展卡爾曼濾波器(EKF)和基于統(tǒng)計線性回歸的非線性卡爾曼濾波器(SPKF)。
EKF是指將非線性模型在狀態(tài)估計值附近做一階泰勒級數(shù)展開,從而實現(xiàn)非線性系統(tǒng)的線性化,然后采用KF算法對線性化后的系統(tǒng)進(jìn)行狀態(tài)估計。這種方法只能得到一階近似值,所以僅適合于弱非線性系統(tǒng),并且在計算過程中需要計算Jacobian矩陣及其冪。
SPKF是依據(jù)一種被稱為UT變換的方法來實現(xiàn)非線性系統(tǒng)的狀態(tài)估計。UT變換采用具有確定性的點集——Sigma點來表征輸入狀態(tài)的分布,然后對每個Sigma點分別進(jìn)行非線性的變換,通過加權(quán)計算捕捉到變換后的統(tǒng)計特性。在這個過程中不涉及求導(dǎo)和雅可比矩陣的計算,所以較適用于強非線性系統(tǒng),計算精度能達(dá)到2階。SPKF有2種比較常用的方法:無跡卡爾曼濾波法(UKF)和中心差分卡爾曼濾波法(CDKF)。這2種方法的差別僅在于權(quán)重常數(shù)的取值不同,其本質(zhì)是一樣的。
另外,傳統(tǒng)的卡爾曼濾波器是將過程和測量噪聲當(dāng)作互不相關(guān)的零均值、協(xié)方差為常數(shù)的高斯白噪聲處理的。但在實際應(yīng)用中需要大量的實驗才能確定合適的協(xié)方差常數(shù)。即使能合理確定該常數(shù),還是會因為這個常數(shù)產(chǎn)生的誤差對估計結(jié)果產(chǎn)生負(fù)面的影響。因此,本文在卡爾曼濾波器中增加了自適應(yīng)過程對系統(tǒng)的過程和測量噪聲協(xié)方差進(jìn)行在線的修正[7]。
2.2 基于自適應(yīng)UKF的雙重卡爾曼濾波器
電池中所有的參數(shù)大體可分為2類:一類類似電池的SOC,特點是變化較快,在整個充放電期間變化范圍為5%~95%,這些參數(shù)統(tǒng)稱為系統(tǒng)“狀態(tài)”;另一類類似電池的電阻,特點是變化較為緩慢,在電池整個充放電期間的變化可能都不超過20%,這些參數(shù)稱為系統(tǒng)的“時變參數(shù)”。
傳統(tǒng)的做法是先對模型中的參數(shù)進(jìn)行離線辨識,然后利用卡爾曼濾波器進(jìn)行SOC的在線估計。這種方法的缺點主要有:1)默認(rèn)了模型中的參數(shù)為常數(shù),而電池中的參數(shù)并不是常數(shù);2)如果模型參數(shù)為非線性的,那么離線參數(shù)估計較難實現(xiàn)。雙重卡爾曼濾波器通過2個獨立的卡爾曼濾波器分別估計系統(tǒng)的狀態(tài)和時變參數(shù),實現(xiàn)電池的特性參數(shù)和SOC同時在線估計,從而提高電池的估計精度。同時,由于UKF適合解決非線性問題,所以該方法能克服非線性參數(shù)估計難以實現(xiàn)的缺點。
在雙重卡爾曼濾波器設(shè)計過程中需要對上述的電池模型做適當(dāng)?shù)男薷模员隳芘c參數(shù)估計模型聯(lián)系起來。同時,為了敘述方便將電池模型簡寫為
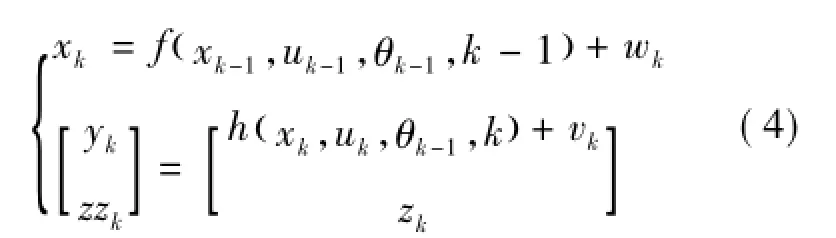
式(4)中:xk為系統(tǒng)狀態(tài)向量[fk,hk,zk]T;uk為系統(tǒng)輸入電流ik;θk為模型參數(shù)向量。有關(guān)文獻(xiàn)說明,通過增加低通濾波器的階nf能夠有效提高模型的性能,但是當(dāng)nf大于4后增加的效果不是很明顯,而且會增加計算量。因此,本文將采用4階的模型。另外,根據(jù)濾波器的設(shè)計特性可知g4是通過下式得到的:

故時變參數(shù)向量為

利用卡爾曼濾波器實現(xiàn)時變參數(shù)的估計,首先需要建立能夠描述系統(tǒng)模型參數(shù)θ的動態(tài)特性的狀態(tài)空間方程式。電池中的參數(shù)總會緩慢地變化,所以在建模時認(rèn)為這些參數(shù)是具有微小擾動的常數(shù),通過在狀態(tài)方程中引入一個虛擬的白噪聲rk來表示。輸出等式必須包含一個可測量的系統(tǒng)參數(shù),這里為電池端電壓dk;同時,使參數(shù)辨識模型明確包含狀態(tài)等式的影響。因此,參數(shù)估計模型為

式(7)中:ek為測量噪聲。
有了上述2個模型就可以利用雙重卡爾曼實現(xiàn)同時在線估計系統(tǒng)的狀態(tài)和時變參數(shù)。以自適應(yīng)的無跡卡爾曼濾波算法為基礎(chǔ)設(shè)計得到的雙重卡爾曼濾波器可簡稱為ADUKF。算法中用到的各個符號的意義分別為:上標(biāo)“^”表示對應(yīng)量的估計值;下標(biāo)k|k-1表示某個向量k時刻根據(jù)上一個采樣時間k-1得到的時間更新值;下標(biāo)k|k-1表示某個向量k時刻的測量更新值;P表示協(xié)方差,包含了狀態(tài)的誤差協(xié)方差和各種噪聲的協(xié)方差;上標(biāo)“~”表示真實值與估計值的差,在卡爾曼濾波器中也被稱為“新息”。自適應(yīng)雙重?zé)o跡卡爾曼濾波器的原理見圖2。
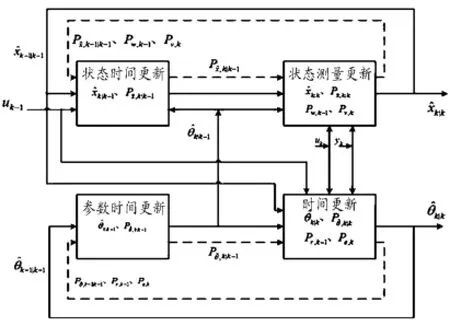
圖2 自適應(yīng)雙重?zé)o跡卡爾曼濾波器原理
算法的具體過程如下[8,9]:
1)確定無跡卡爾曼濾波器中各個權(quán)重的取值方法,如表1所示。
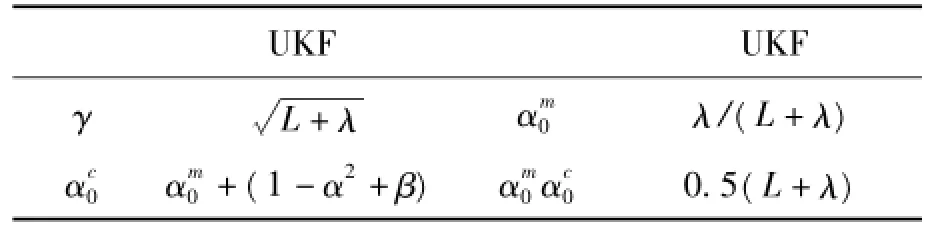
表1 UKF中常數(shù)的取值公式
表1中:L為狀態(tài)向量的維數(shù);α為決定狀態(tài)向量的平均值周圍的sigma點的散播范圍的常數(shù),一般取值范圍為0.000 1<α< 1;β為包含先驗信息的參數(shù),高斯白噪聲的取值為 2;λ為第一個標(biāo)定參數(shù),其計算公式為式(8)中:κ為第2個標(biāo)定參數(shù),通常取值為3-L或0。但當(dāng)L>3時,κ為負(fù)數(shù),會導(dǎo)致計算過程中誤差協(xié)方差矩陣為負(fù)定矩陣,不能進(jìn)行Cholesky分解,所以當(dāng)L>3時,通常取κ的值為0。

2)初始化。由于卡爾曼濾波器對初值具有較好的魯棒性,所以^x0,P~x,0,θ^0,P~θ,0的初值的選取無需很精確。然而,雖然噪聲協(xié)方差進(jìn)行了自適應(yīng)的修正,但實驗證明該修正過程只能在一定的范圍內(nèi)有效,所以Pw,Pv,Pr和Pe的初值仍需根據(jù)實驗結(jié)果進(jìn)行較為精確的估計。
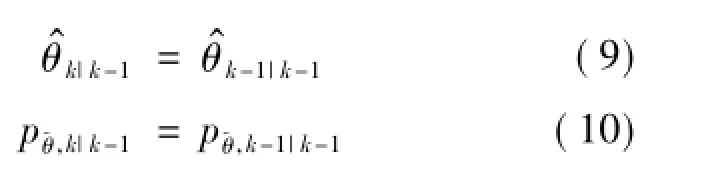
3)時變參數(shù)的時間更新。
4)構(gòu)建狀態(tài)的sigma點向量χk-1|k-1,并完成狀態(tài)和sigma點向量的時間更新。

5)構(gòu)建時變參數(shù)的Sigma點向量。
式(16)中:N為時變參數(shù)向量的維數(shù)。
6)計算時變參數(shù)的輸出估計。
7)計算狀態(tài)的輸出估計。
8)計算狀態(tài)的卡爾曼增益。
9)計算時變參數(shù)的卡爾曼增益。
10)分別完成狀態(tài)和時變參數(shù)的測量更新。

時變參數(shù)的測量更新的計算方法與狀態(tài)一致,這里不再列出。
11)完成狀態(tài)和時變參數(shù)中噪聲的協(xié)方差的自適應(yīng)更新。其中,Un(k)為k時刻的殘差。Pr,k-1,Pe,k和Pw,k-1,Pv,k計算方法一致。
3 仿真分析
3.1 實驗結(jié)果
為了驗證雙重卡爾曼濾波器算法的有效性,需要先對電池進(jìn)行實驗。本文中主要進(jìn)行的實驗為恒流充放電實驗和變電流的脈沖充放電實驗。使用的鋰電池特性參數(shù)為:標(biāo)稱容量為7.5 Ah,標(biāo)稱電壓為3.9 V,充電截止電壓為4.5 V,放電截止電壓為3.4 V。實驗結(jié)果如下:
1)以極小電流進(jìn)行恒流充放電實驗,可以盡量減小電池中遲滯、電池內(nèi)阻等動態(tài)因素對電池充放電實驗的影響,然后求取充放電曲線的平均值,所得到的曲線即為OCV-SOC的關(guān)系曲線,如圖3所示。
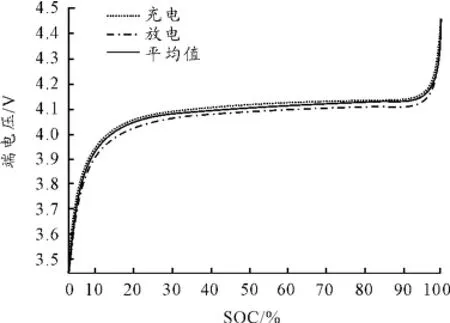
圖3 電池端電壓與SOC的關(guān)系曲線
2)變電流脈沖實驗可以檢驗電池在不同電流大小下的性能,實驗結(jié)果如圖4所示。
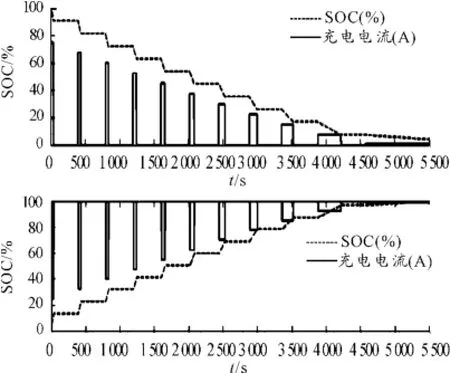
圖4 充放電電流、SOC與時間的關(guān)系
3.2 仿真結(jié)果
為了保證濾波器的穩(wěn)定性,需要使濾波器所有的極點均屬于-1~1。所以本文在進(jìn)行參數(shù)估計時不對αj直接進(jìn)行估計,而是定義βj=tan(π× αj/2)。在進(jìn)行估計時無論β取何值,得到的αj均屬于-1~1。
電池模型的ADUKF算法中需要設(shè)定的初始值分別為:設(shè)置SOC為精確值,那么狀態(tài)向量=[f0,1,f0,2,f0,3,f0,4,h0]T=[-77-85-78-80 0.001 0.95]T。其中:f0,i表示4階的低通濾波器中的各個狀態(tài);狀態(tài)誤差協(xié)方差為0.02×I(6);狀態(tài)方程中的噪聲協(xié)方差分別為Pw,0=0.02×I(6)和Pv,0=0. 001;時變參數(shù)=[R,g1,g2,g3,β1,β2,β3,β4,M,r]T=[0.005-0.52-1.3-0.18 0.74 0.70 0.75 0.76 0.005 2]T;時變參數(shù)誤差協(xié)方差=0.02×I(10);時變參數(shù)方程中的噪聲協(xié)方差分別為Pr,0=0.02×I(10)和Pe,0=0. 001;殘差序列Un的維數(shù)n=10。根據(jù)這些初始值計算出的結(jié)果見圖5。
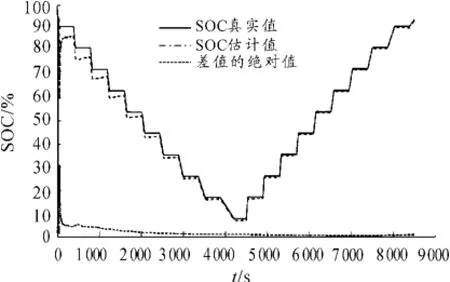
圖5 ADUKF估算的SOC值與實際值的比較
從圖5可以看出:雙重卡爾曼濾波器的收斂速度很快,估計精度較高。
為了證明ADUKF算法具有很好的對初值的修正作用,這里重新設(shè)置狀態(tài)向量的初值為[-20 -20-20-20 0.001 0.5]T,時變參數(shù)向量的初值為=[0.02-0.4-1-.2 0.7 0.7 0.7 0.7 0.002 2]T,其他參數(shù)值保持不變,SOC估計結(jié)果如圖6所示。其中,小圖為大圖的局部放大。從圖6可以看出:大約在35 s內(nèi)就能消除不同初值導(dǎo)致的估計結(jié)果的誤差。
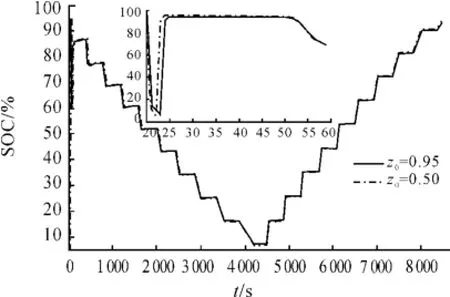
圖6 不同初值的SOC估計結(jié)果的比較
下面以電池內(nèi)阻為例來說明時變參數(shù)的變化情況。電池內(nèi)阻的在線辨識結(jié)果見圖7。從圖7可以看出:電池內(nèi)阻是一個變化范圍較大的量,而不是一個趨于恒定的量。另外,從圖7還可以看出:隨著充放電的深入,電池的內(nèi)阻會隨著時間逐漸變大,說明在電池充放電的末端,電池的使用效率會變低。這也是限制電池SOC使用范圍的一個原因。
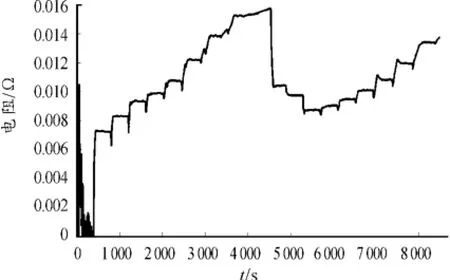
圖7 電池內(nèi)阻R隨時間的變化
4 結(jié)束語
本文運用自適應(yīng)的無跡雙重卡爾曼濾波算法實現(xiàn)了對鋰電池的SOC及其模型參數(shù)的同時在線估計,從而保證電池有效期內(nèi)電池SOC的估計精度。仿真與實驗對比的結(jié)果表明:該方法能夠?qū)崿F(xiàn)SOC的精確估計,并且能夠在較短的時間內(nèi)有效修正初值誤差的影響和噪聲干擾。另外,在線估計的電池內(nèi)阻等參數(shù)能為實時判斷電池的健康狀態(tài)提供一定的依據(jù),提高了電池的可監(jiān)控性,為電動汽車能量的合理分配和再生利用提供準(zhǔn)確的蓄電池狀態(tài)信息。
[1]Zhu C B,Coleman M,Hurley W G.State of charge determination in a lead-acid battery:combined EMF estimation and Ah-balance approach[C]//Power Electronics Specialists Conference.[S.l.],IEEE,2004:1908-1914.
[2]陳艷,趙明富,興仁龍,等.基于SVM的光纖鉛酸蓄電池容量在線智能檢測技術(shù)研究[J].壓電與聲光,2008,30(3):304-307.
[3]戴海峰,魏學(xué)哲,孫澤昌.基于擴展卡爾曼濾波算法的燃料電池車用鋰離子動力電池荷電狀態(tài)估計[J].機械工程學(xué)報,2007(2):92-95.
[4]Plett G.Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs Part1. Background[J].Journal Of Power Sources,2004,134 (2):252-261.
[5]Plett G.Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs Part2. Modeling andidentification[J].JournalOfPower Sources,2004,134(2):262-276.
[6]夏超英,張術(shù),孫宏濤.基于推廣卡爾曼濾波算法的SOC估算策略[J].電源技術(shù),2007(5):414-417.
[7]Sun F,Hu X,Zou Y,et al.Adaptive unscented Kalman filtering for state of charge estimation of a lithiumion battery for electric vehicles[J].Energy,2011,36(5):3531 -3540.
[8]Plett G L.Sigma-point Kalman filtering for battery management systems of LiPB-base HEV battery packs Part1: Introduction and state estimation[J].Journal of power Sources,2006,161:1356-1368.
[9]Plett G L.Sigma-point Kalman filtering for battery management systems of LiPB-base HEV battery packs Part2: Introduction and state estimation[J].2006,161:1356 -1368.
(責(zé)任編輯 劉舸)
States of Charge Estimation of Battery Based on the Dual Kalman Filter
SHANG Gao-gao,ZHU Chen-yang
(School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
In order to estimate battery state-of-charge effectively,an accurate battery model was built which contained the hysteresis effect and relaxation effect.Then,on the basis of adaptive unscented Kalman filter,the dual Kalman filter was designed which could estimate the parameter and state online at the same time.Finally,the comparison results between test and simulation show that this method can effectively suppress noise,reduce the SOC estimate error and achieve the precise SOC estimated value.And,the estimated value of parameter can provide evidence for the judging of state-ofhealth of battery.
state of charge;Kalman filter;adaptive
U469.72
A
1674-8425(2014)06-0001-07
10.3969/j.issn.1674-8425(z).2014.06.001
2013-11-28
商高高(1962—),男,博士,副教授,主要從事汽車機電一體化技術(shù)方面的研究;通信作者朱晨陽(1989—),男,碩士研究生,主要從事汽車機電一體化技術(shù)方面的研究。
商高高,朱晨陽.基于雙重卡爾曼濾波器電池荷電狀態(tài)的估計[J].重慶理工大學(xué)學(xué)報:自然科學(xué)版,2014 (6):1-7.
format:SHANG Gao-gao,ZHU Chen-yang.States of Charge Estimation of Battery Based on the Dual Kalman Filter[J].Journal of Chongqing University of Technology:Natural Science,2014(6):1-7.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36