DEM航線曝光點坐標計算方法
2014-06-27 05:47:18周桂初程新文李英成李英杰柳忠偉
測繪通報 2014年7期
周桂初,程新文,李英成,李英杰,柳忠偉
(1.中國地質大學(武漢),湖北武漢 430074;2.中測新圖(北京)遙感技術有限責任公司,北京 100039)
DEM航線曝光點坐標計算方法
周桂初1,2,程新文1,李英成2,李英杰2,柳忠偉1,2
(1.中國地質大學(武漢),湖北武漢 430074;2.中測新圖(北京)遙感技術有限責任公司,北京 100039)
提出一種基于全國DEM數據庫,根據飛機飛行高度、飛行方向、設計重疊度、當前曝光點坐標,自動快速計算下一曝光點坐標的計算方法,該方法不但能滿足直升飛機自由飛行路線的影像獲取,而且能顧及地形起伏對像片重疊度的影響。試驗表明,該方法設計的曝光點坐標更加科學、合理。
高斯正算;高斯反算;DEM動態分塊;DEM信息檢索;基線修改
一、引 言
傳統的航線設計方法是采用諸如ArcGIS、Auto-CAD等軟件,基于基本比例尺地形圖,粗略考慮地形起伏對平均基準面的影響,按照一定重疊度手工完成航線及像主點敷設工作,航線設計工作效率低、結果精度低、數據冗余量大[1]。
為提高設計工作效率與航線設計精度,國內外學者研究了一些專門的航線設計軟件,如美國的ASCOT、德國CCNS4、國內中測新圖研發的TOPPlan航線設計軟件等。這些軟件在進行航線設計前,必須明確知道測區范圍,然而在地震、泥石流等自然災害來臨時,無法知道災區范圍及損壞程度,相關部門需要直升飛機搭載便攜式航空攝影儀來第一時間獲得災區的航空影像數據,顯然無法設計直升飛機飛行的航線,這一系列軟件由于缺乏自適應性,無法滿足應急需要。本文提出基于全國DEM數據庫,直升飛機飛行高度、飛行方向、設計重疊度,實時自動根據當前曝光點坐標計算下一曝光點坐標的方法。
二、航線曝光點計算方法與原理
直升飛機進行應急救災時,在無準確的航線設計文件下,需要根據災區實際情況進行自適應飛行控制來進行影像拍攝。因此在已知相機參數(像元大小、旁向像片像素數、航向像片像素數、焦距)與航攝參數(航高、航攝比例尺、飛行方向、設計重疊度)后,根據當前曝光點坐標自動計算下一曝光點坐標,步驟為:①當前曝光點高斯正算;②預設下一曝光點;③高斯反算,求取當前曝光點及下一曝光點像片覆蓋的DEM實際范圍;④讀取相鄰兩張像片覆蓋區域DEM的高程信息;⑤根據地面起伏修正預設重疊度;⑥修改基線長度,直至重疊度滿足要求后計算曝光點坐標。
1.當前曝光點高斯正算
在不考慮攝站中心與GPS接收機相位中心偏移,且GPS接收機采用WGS-84坐標系時,可知曝光點坐標是大地坐標(B,L,H)或空間直角坐標(X,Y,Z)。由于像片覆蓋地面實際范圍比較小,因此為避免把飛機飛行方向改化為大地方位角及基線改化為大地線帶來的誤差,采用高斯-克呂格投影,將曝光點的橢球坐標正算為平面坐標。
2.預設下一曝光點

以真北方向為起始方向,飛機飛行方向為a,那么預設下一曝光點坐標為
3.計算像片覆蓋地面實際范圍
如果像片傾角小于3°,則忽略像片傾斜對像點位移的影響,近似為水平像片,那么可根據式(3)得到相鄰曝光點影像覆蓋區域
式中,m為航攝比例尺;(x0,y0)為曝光點的高斯平面坐標;(x1,y1)為以像片中心為原點對應的像點坐標。因此,已知當前曝光點及預測曝光點,結合式(3),可求得兩張像片覆蓋區域內所有拐點的高斯平面坐標。由于需要根據DEM高程信息實時糾正預測曝光點位置,而DEM采用的是WGS-84坐標系下的地理坐標,因此必須將像片覆蓋區域的高斯平面坐標反算成地理坐標,高斯反算公式可參考文獻[3]。當飛機飛行方向為偏真北方向30°,相鄰兩張像片在DEM覆蓋實際范圍如圖1所示。
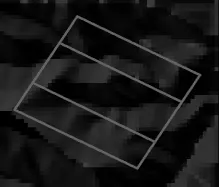
圖1 飛行方向為30°,相鄰像片覆蓋的DEM區域
4.DEM高程信息檢索
由于在航線設計軟件中,DEM是作為各種計算的基礎數據,如重疊度的調整、攝區的分區與像主點的敷設、基準面的計算等,可見DEM數據的組織在軟件運行效率方面扮演著舉足輕重的作用。本文提出了一種分塊動態提取DEM數據的方法,旨在提出DEM數據最佳吻合像片范圍下的高程數據。DEM數據分塊組織完成后,需要檢索出實際多邊形覆蓋區域DEM的高程信息(相機覆蓋范圍高程最值、統計信息等),因此本文采用基于掃描線的DEM高程信息檢索,旨在高效地檢索出DEM的高程信息。
(1)DEM數據組織
此方法的主要思想是:對航攝區域分塊組織,然后按塊循環與航攝區域求交,如果相交,就提取這塊DEM數據到內存參加航線設計的計算;如果不相交,則不提取這塊數據并賦空值,對其賦空值是為了方便后面的計算。最后把所有提取的DEM數據作為背景數據參與顯示與分析。
就如何分塊及分塊的大小如何確定,一般有兩種選擇:①根據國家標準航線敷設的要求以成圖圖幅的大小為塊的大小,這樣就不用建立航攝區域的外包矩形了;②根據攝區實際大小合理選擇塊的大小,如圖2所示,此算法的具體步驟為:
1)構造需要提取的格網結構體(struct grid),結構體的主要數據內容是:格網的左下角坐標(m_ LX,m_BY)、格網的寬(ΔL)和高(ΔB)、格網所代表的DEM數據(m_Data)。
2)根據輸入的航攝區域拐點坐標構造攝區的多邊形范圍。
3)尋找攝區多邊形在L、B方向上的最大值與最小值,形成攝區的最小外包矩形,然后根據格網大小(ΔL,ΔB)求得L、B方向上的格網數據及每個格網的左下角地理坐標。
4)建立格網多邊形,根據格網是否與攝區多邊形相交,依次提取所需要的DEM數據,并分別進行標記。
5)把所提取的與攝區相交的格網左下角地理坐標轉換為格網左上角像素坐標,并分塊循環讀取格網DEM數據,對于其他格網,對其存儲DEM數據的變量賦NULL值。
6)保存并輸出所提取的DEM數據。
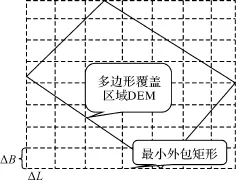
圖2 多邊形DEM分塊圖
(2)多邊形DEM高程信息檢索
本文選擇的算法是基于掃描線的DEM高程信息檢索,該算法的思想是:①根據DEM范圍的拐點建立外包矩形,選擇矩形的邊長較短邊,然后以一個像素大小的間隔依次建立直線,得到直線與多邊形的交點數與交點坐標;②依次取兩個交點之間的中點,并判斷此中點是否在多邊形內,如果是,則提取這兩個交點組成的線段內的像素值,如果不是則不提取;③統計所有提取出的像素值就是多邊形DEM的高程信息。
DEM數據分塊對此算法產生的影響主要是在提取像素值時需要作一個轉換,就是像素在外包矩形內的行列號與此像素在所屬分塊內的行列號的轉換。實現該轉換關系的主要程序流程如圖3所示。
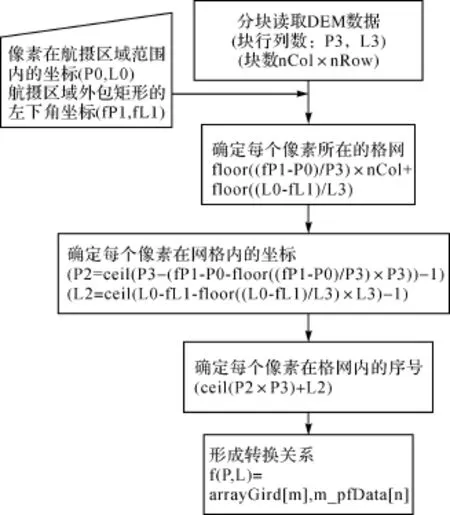
圖3 行列號轉換主要流程
5.根據地面起伏修正預設重疊度
地形起伏引起的航向重疊度誤差如圖4所示。
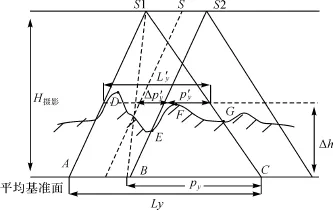
圖4 地形起伏引起的航向重疊度誤差
設py為規定重疊度在平均基準面上所對應的航向重疊長度;Δh為地面某點高出平均基準面的相對高差;p′y為比平均基準面高出Δh的地面實際航向重疊度;Ly為像幅的航向邊長相應于平均基準面上的長度;L′y為像幅的航向邊長在高出平均基準面Δh地面上的長度;Δp′y為地形起伏引起的航向重疊度寬度誤差。根據文獻[4]推導可得,已知計劃的平均基準面的航向重疊度py,那么地面某點高出平均基準面的實際航向重疊度p′y為

6.修改基線長度
根據多邊形DEM高程信息檢索法,可得相鄰像片覆蓋區域的公共區域的DEM高程最高點,以及兩張像片覆蓋DEM區域的平均高程(假設基準高程)。因此可得到Δh,代入式(4),可得實際重疊度,然后根據實際重疊度與預設重疊度調整基線,直至滿足實際所需要的重疊為止[5]。流程如圖5所示。
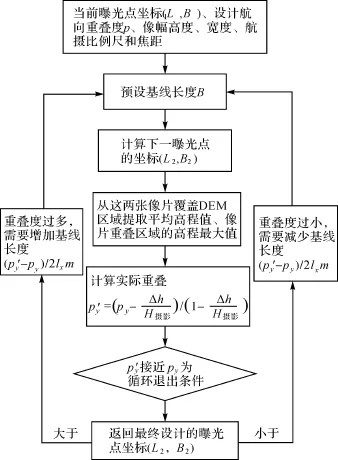
圖5 曝光點計算概略流程
三、試驗分析與驗證
筆者根據上述的理論分析與設計,利用C++和QT組件,研發基于分辨率為90 m的SRTM_DEM,根據當前曝光點實時精確解算下一曝光點的程序。
程序采用QT設計界面,輸入相關像片參數、航攝參數,如圖6所示;根據當前曝光點計算在3°帶,WGS-84橢球下的高斯正反算如圖7所示。

圖6 參數設置
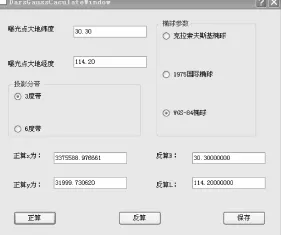
圖7 曝光點正反算
本文根據下面兩個試驗來驗證該算法設計曝光點的合理性及程序運行效率:
試驗1:在平坦區域敷設航線。采用的相機參數、航攝參數如圖6和圖7所示,像片重疊度至少為60%,飛機飛行方向為偏北30°,起始曝光點地理位置為(30°30′N,114°20′E)。通過連續幾個曝光點計算,得到如圖8所示的像片覆蓋區域與曝光點及航線設計表。

圖8 平坦區域DEM的精確曝光點及像片覆蓋范圍
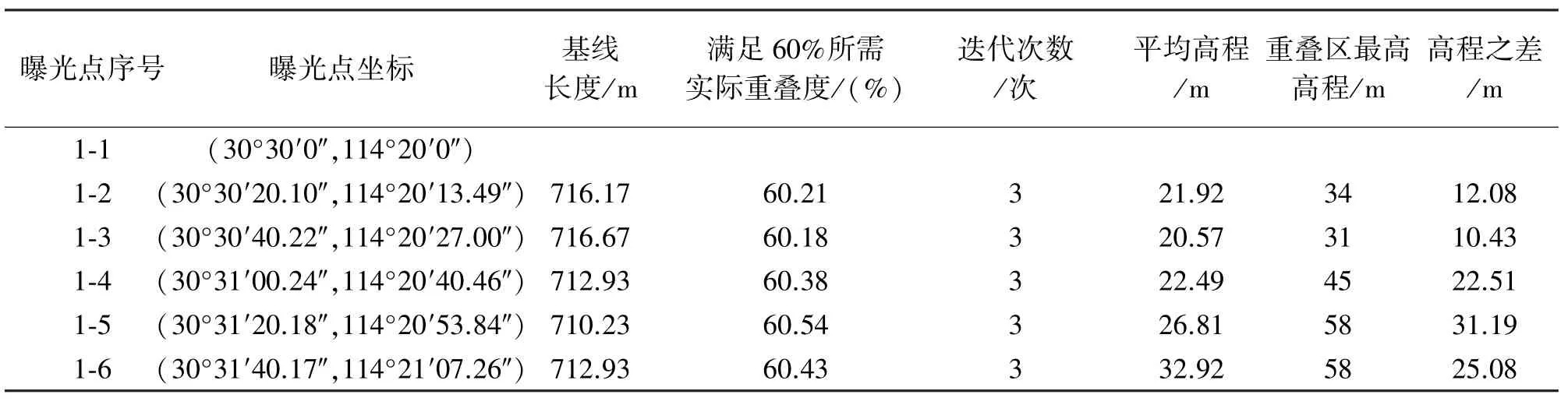
表1 平坦區域航線設計
試驗1表明,相鄰兩張像片由于重疊區域高程最值與覆蓋區域高程差值不大,即地形起伏不大,因此航線敷設的曝光點均勻,基線長相差不大。而且兩像片覆蓋平均區域高程與重疊區域最高高程差值越大,在滿足實際重疊至少為60%時,所需要像片重疊度越大。
試驗2:在地勢崎嶇地區敷設航線。選取區域為四川省與陜西省交界地區,處于秦嶺地帶,起始曝光點地理坐標為(33°14′12.23″N,104°22′09.86″E),飛機飛行方向為偏北44.42°,最小重疊度為60%,其他相機及飛行參數同試驗1。經過連續幾個曝光點計算,得到如圖9所示的像片覆蓋區域與曝光點及航線設計表。
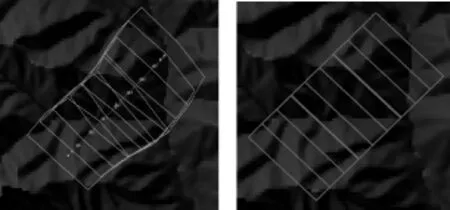
圖9 地勢崎嶇區域DEM的精確曝光點及像片覆蓋范圍
試驗2表明,相鄰兩張像片由于重疊區域高程最值與覆蓋區域高程差值較,即地形起伏明顯,因此設計航線兩兩曝光點間距不等,且有些差距明顯。而且兩像片覆蓋平均區域高程與重疊區域最高高程差值越大,在滿足實際重疊至少為60%時,所需要像片重疊度越大。
四、結束語
根據試驗表明及應用結果,本程序在計算曝光時,充分考慮兩兩相鄰像片覆蓋的實際地形進行曝光點的精確計算,因此曝光點的計算更加精確,航線設計更加合理。同時在直升飛機應急救災時,只需輸入相應的飛行方向及航高,即可實時地根據當前地形及當前曝光點坐標計算下一曝光點坐標。試驗表明,本文提出的DEM動態分塊、幾何法探索DEM高程信息,不但可提高DEM信息的讀取效率,而且更加合理地根據實際像片實際范圍來讀取高程信息。因此隨著航空攝影技術的發展,在獲取地理信息的過程中對于數字化和自動化的要求越來越高,所以提升計算機輔助航線設計的效率以及適應性是非常有必要的,并且也是一項具有創新性的工作。

表2 地勢崎嶇航線設計
[1] 朱武,嚴榮華.基于DEM的航空攝影技術設計方法[J].測繪科學,2002,27(4):42-44.
[2] 張劍清,潘勵,王樹根,等.攝影測量學[M].武漢:武漢大學出版社,2009.
[3] 孔祥元,郭際明,劉宗泉,等.大地測量學基礎[M].武漢:武漢大學出版社,2005.
[4] 王東亮,萬幼川,徐景中,等.基于DEM的機載LiDAR航線設計[J].測繪科學,2011,36(1):116-118.
[5] 譚國成,范業穩,司順奇.基于DEM的地理坐標系下航空攝影技術設計[J].測繪科學,2008,33(2):84-87.
[6] 熊韻斌.Visual C++程序設計[M].北京:清華大學出版社,2002.
[7] 李飛,儲美華,戴強華,等.基于GPS和GIS的航空攝影測量飛行管理系統關鍵技術研究[J].測繪科學,2005,30(6):38-39.
[8] 王光霞,朱長青.數字高程模型地形描述精度的研究[J].測繪學報,2004,33(2):168-173.
[9] 王東亮,肖建華,萬幼川,等.基于立體模型重疊度的航空攝影航線設計[J].測繪學報,2011,40(2):188-193.
The Method of Calculating Exposure Point Coordinate of Flying Route Based on DEM
ZHOU Guichu,CHENG Xinwen,LI Yingcheng,LI Yingjie,LIU Zhongwei
P237
B
0494-0911(2014)07-0031-04
2013-05-25
周桂初(1987—),男,四川廣安人,碩士生,主要從事航空攝影測量研究工作。
周桂初,程新文,李英成,等.DEM航線曝光點坐標計算方法[J].測繪通報,2014(7):31-34.
10.13474/j.cnki.11-2246.2014.0219
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
