基于全自動全站儀的地鐵隧道自動化變形監測系統的設計與實現
2014-06-29 07:26:54柏文鋒
城市勘測 2014年3期
柏文鋒
(廣州地鐵設計院研究有限公司,廣東廣州 510010)
1 引言
隨著經濟的發展和城市交通壓力的加大,越來越多的城市開始興建地鐵,地鐵的修建帶動了其沿線的物業建設,而毗鄰地鐵的建筑施工尤其是深基坑施工,不可避免地對地鐵結構安全產生影響。因此,對于地鐵建(構)筑物進行變形監測,以確保其主體結構以及周邊環境的安全是保障地鐵正常運行、保障施工安全的重要環節。
對于目前已處于運營期間的地鐵隧道結構變形監測內容主要包括區間隧道拱頂及道床的沉降、隧道管片的側向位移及隧道結構的收斂變形等。運營隧道在地鐵運行期間是不允許作業人員進入軌行區的,所以傳統的人工作業模式無法保證監測的連續性,這就要求在地鐵隧道中實施無人值守的自動化的變形監測[1~3]。
徠卡公司基于徠卡測量機器人開發的GeoMos變形監測系統是目前地鐵變形監測中常用的自動化監測系統[4,5],國內的解放軍信息工程大學、武漢大學等也針對國內的測量規范研制了遠程自動化監測系統[6~8]。地鐵監測行業的發展對自動化監測系統提出了更高的要求,針對越來越多的監測項目需求,廣州地鐵設計院研究有限公司與武漢大學合作開發了一套能夠遠程控制管理多項目的自動化地鐵隧道變形監測系統。
2 系統結構
2.1 系統需求分析
廣州地鐵設計院研究有限公司目前正在運行的無人值守自動監測工作站有多個,隨著測站的增多,工作站的壓力逐漸增大,系統的穩定性的要求也日益增強,傳統的“單任務,單測站”的模式已成為制約系統規模化的瓶頸。因此,建立一套能夠對監測項目進行統一控制、管理的系統,減少工作站的運行負擔,建立C/S(客戶端/服務器)架構的自動化監測系統迫在眉睫。
基于工程項目中的實際情況及經驗,對自動化地鐵隧道變形監測系統提出以下需求:
(1)實現運營期間地鐵隧道內變形監測數據的自動化采集;
(2)搭建便攜穩定的數據服務器;
(3)通過無線通訊實現遠程多項目多任務控制以及數據接收;
(4)組建C/S架構的自動化監測平臺;
(5)變形監測數據的處理及分析;
(6)數據、成果的科學管理;
(7)圖形報表的顯示和輸出,報告草稿的自動化生成。
2.2 系統總體架構
根據需求對系統架構設計如圖1所示,系統由服務器(Server)、控制端(Controller)、客戶端(Client)三部分組成,各部分之間通過因特網進行數據通訊。各部分具體設計如下:
服務器是數據的物理存儲中心和控制端與客戶端的網絡交互平臺,具有固定的IP地址,主要包括數據庫、服務器管理軟件以及通訊軟件。控制端為任意安裝了控制端管理軟件的已聯網電腦,通過互聯網可以實現對監測現場設備的查詢、控制以及查詢、輸出數據庫中的監測記錄、結果文件。客戶端安裝在地鐵隧道監測現場,包括工控機、徠卡高精度測量機器人以及電纜、無線通訊裝置等,用于完成變形監測數據的采集以及與服務器管理軟件、客戶端管理軟件的通訊。
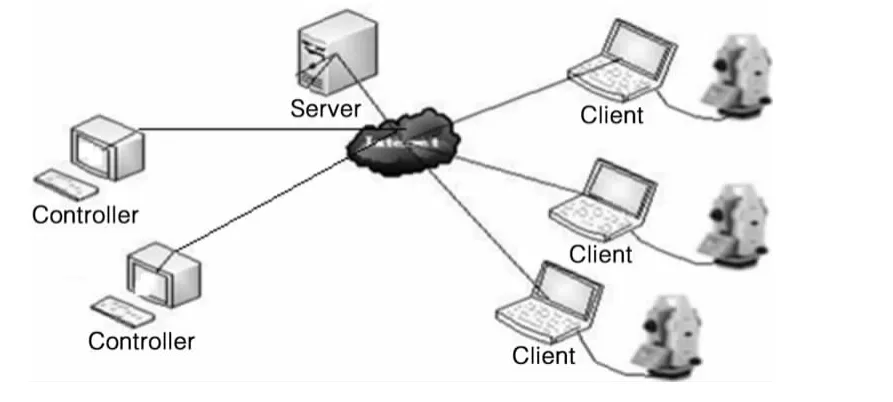
圖1 系統總體架構圖
3 系統的設計與實現
3.1 數據庫設計與實現
本系統使用的數據庫管理系統為SQL Server,針對數據庫對不同項目以及項目數據信息的管理需求,將數據庫設計為兩個層次如圖2所示:
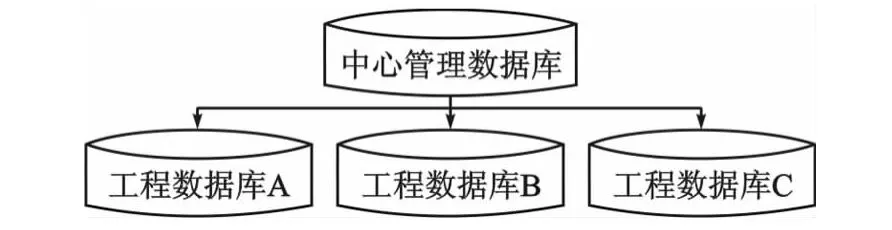
圖2 數據庫結構
中心管理數據庫用來管理所有項目的基本信息,每個項目對應一個工程數據庫,包括該項目的所有配置信息以及監測信息。數據庫設計主要由工程表、用戶信息表、異常登錄信息表構成。
工程數據庫用來管理每個工程項目的配置信息以及監測數據、結果,設計的數據表主要包含了工程中的配置信息以及工程中的監測數據信息。
3.2 數據通訊的設計與實現
根據系統的總體架構,客戶端實現數據采集工作并發送給服務器,服務器端管理軟件需接收來自不同的客戶端的監測數據并上傳至數據庫中,同時控制端和服務器端管理軟件還需對客戶端的設備實現查詢、控制,基于此設計了各部分之間的數據通訊模式如圖3所示。
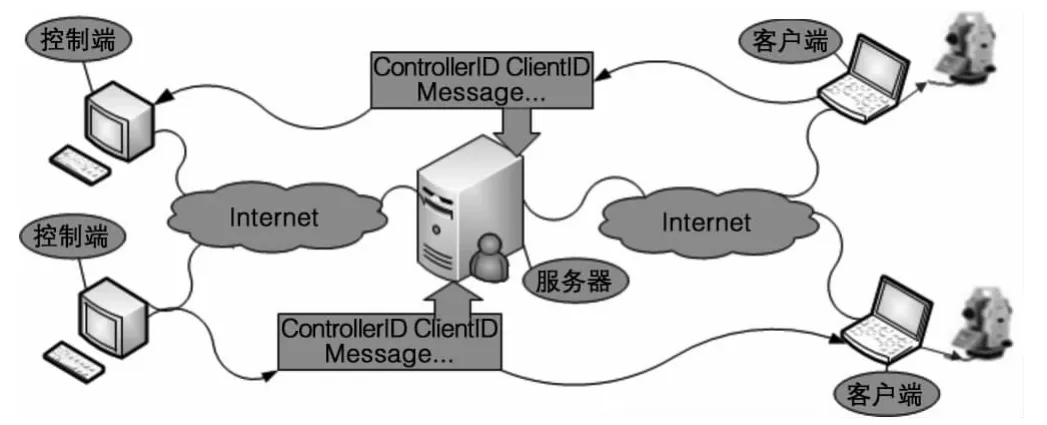
圖3 系統各部分數據通訊模式
服務器具有固定的IP地址,各控制端、客戶端具有唯一的標識ID,控制端、客戶端主動連接服務器并定時發送心跳包,服務器實時獲取更新各控制端、客戶端的IP地址以及在線狀態。
系統開發在Visual 2010的平臺上采用Visual C#語言實現,數據通訊模塊采用多線程實現。服務器端管理軟件和控制端管理軟件需要同時與不同客戶端進行數據通訊,在程序啟動階段開啟工作主線程和網絡監聽線程直到程序被退出,同時根據需要動態開啟多個數據發送線程和數據接收線程。工作主線程完成的工作包括獲取并更新系統項目中全部客戶端設備的在線狀態信息、檢查各數據接收線程是否超時并完成超時處理、檢查管理軟件是否連接上服務器進行掉線自動重連等。網絡監聽線程實時監聽,獲取服務器發送過來的消息完成指令編譯并做出對應的操作。
3.3 數據采集模塊的設計與實現
數據采集方式采用方向觀測法,根據《國家三角測量規范(GB/T 17942-2000)》方向法的操作順序制定觀測流程。觀測限差根據《工程測量規范(GB50026-2007)》中平面控制測量、高程控制測量中的要求設置,同時用戶也可以根據項目的需求自定義觀測限差。采用單機版數據采集軟件對監測點完成初始測量后,根據初始測量信息完成自動測量。同時由于運營隧道中行車間隔短,數據采集模塊充分考慮目標被遮擋、測量超時等異常測量的智能處理。數據采集模塊在Visual 2010的平臺上采用Visual C#語言進行Windows組件開發,以服務的形式安裝在工控機中,通過電纜線控制測量機器人完成監測數據的采集工作。
3.4 數據處理、報表輸出模塊的設計與實現
本系統目前采用的數據處理方法為根據基準點組的后方交會觀測數據計算,測站坐標后采用極坐標法計算監測點坐標。考慮到目前主要工程項目中的設站類型,測站類型分為固定測站、平面固定測站、待判定測站和變化測站幾種,根據測站類型和后方交會觀測數據判斷是否進行后方交會計算。同時充分考慮到地鐵隧道變形監測范圍狹窄以及地鐵隧道變形特點增加方向基準點對基準點網形進行優化,提高后方交會計算測站坐標的精度。
報表輸出模塊使用NPOI控件開發,該控件直接讀寫Office格式文檔,不需要在服務器上安裝微軟的Office,可以避免版權問題。報表生成采用向導模式輸入必要信息之后自動生成,靈活方便,支持圖片導入,生成的報表內容圖文并茂。
4 工程應用
某工程基坑位于廣州市越秀區中山一路和農林東路交匯處,基坑設二層地下室,采用鉆(沖)孔樁基礎,基坑周邊總長度約 250 m;基坑開挖深度約 12 m,基坑四周環境比較復雜,且毗鄰廣州地鐵一號線東山口至楊箕區間。由于基坑施工過程中的卸載、失水等必然引起隧道周邊的環境的變化,環境的變化會對隧道結構產生影響,因此對隧道結構狀況進行動態監測,對于指導信息化施工,保障地鐵安全具有重大意義。
本項目采用上文所述的自動化監測系統,監測項目包括隧道結構體的拱頂沉降、隧道側向位移等。監測點布于基坑施工可能造成影響的隧道部分區段,監測區域內以 10 m間距布設監測斷面,各監測斷面布點情況如圖4所示。
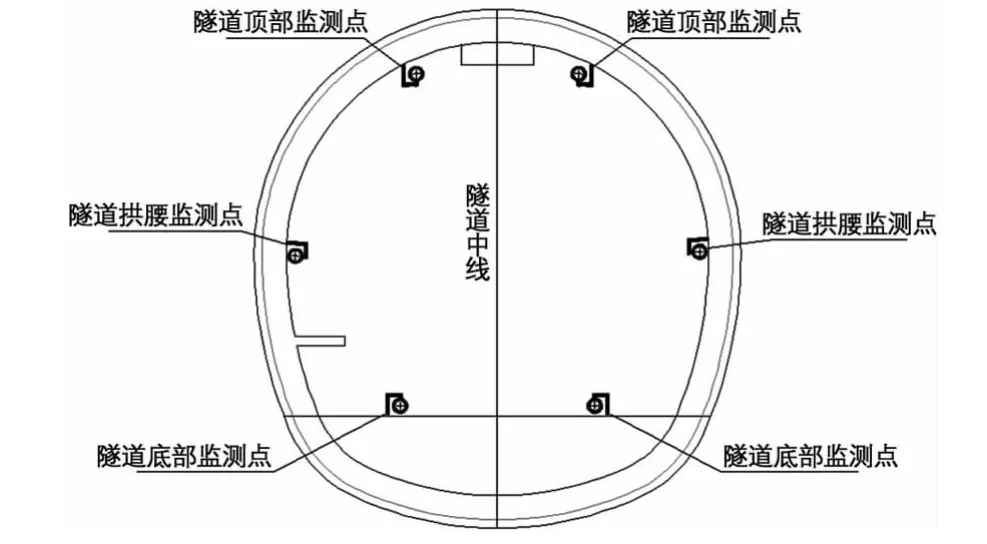
圖4 隧道斷面圖
通過監測發現,某斷面各測點Z方向(豎直方向)的變形過程線如圖5所示。
通過上述過程線可以發現,在監測時段內,數據曲線變化平穩且呈逐步增長的態勢,符合現場施工情況及原設計評估的變化規律。通過變化曲線可以看出,基坑施工對地鐵隧道結構產生了一個逐步累積的不利影響,但本項目中整體影響較小。通過現場對隧道內觀的檢查,隧道結構情況良好,未出現裂紋、滲水等不良病害,并結合隧道日常運營維護監測的情況,兩者反映的隧道結構情況也基本相符。
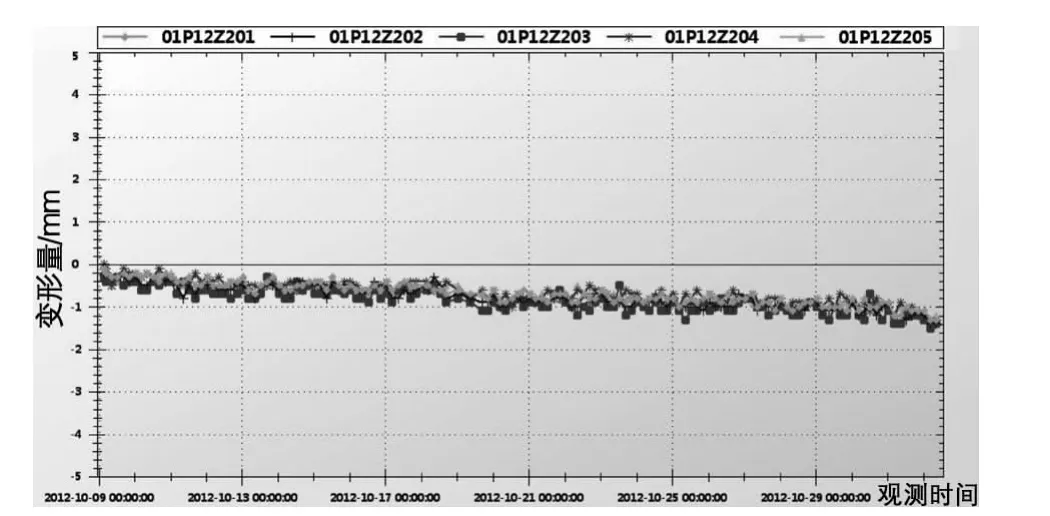
圖5 某斷面變形過程線
5 結語
本文介紹了結合現代化地鐵隧道變形監測實際情況進行設計和開發的隧道結構變形自動化監測系統,設計了系統的整體框架結構,針對本系統多項目管理的特點,詳細介紹了其數據庫設計以及數據通訊模式。最后通過在廣州某項目中的實際應用驗證了本系統的實用性。
[1]包歡,徐忠陽,張良琚.自動變形監測系統在地鐵結構變形監測中的應用[J].測繪學院學報,2003(6).
[2]范百興.TCA全站儀實現測量數據的全自動化處理[J].北京測繪,2003(2).
[3]尤相駿,潘國榮,孫成剛.用GeoBASIC開發測量機器人機載程序[J].鐵路航測,2002(1).
[4]張書華,蔣瑞波.基于測量機器人的隧道變形自動監測系統的設計與實現[J].測繪科學,2009(5).
[5]范百興.GeoBasic開發TPS1100全站儀機載程序[J].四川測繪,2003(3).
[6]梅文勝,張正祿,黃全義.測量機器人在變形監測中的應用研究[J].大壩與安全,2002(5).
[7]黃騰,李桂華,孫景領等.地鐵隧道結構變形監測數據管理系統的設計與實現[J].測繪工程,2006(12).
[8]梅文勝,張正祿,郭際明等.測量機器人變形監測系統軟件研究[J].武漢大學學報·信息科學版,2002(2)
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
財經(2017年2期)2017-03-10 14:35:35
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
財經(2016年15期)2016-06-03 07:38:02
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21