基于雷達(dá)距離像的錐體目標(biāo)進(jìn)動(dòng)參數(shù)估計(jì)方法
2014-07-10 03:28:52寧超黃璟朱勇肖志河
現(xiàn)代防御技術(shù) 2014年4期
關(guān)鍵詞:方法
寧超,黃璟,朱勇,肖志河
(電磁散射重點(diǎn)實(shí)驗(yàn)室, 北京 100854)
0 引言
空間目標(biāo)的微運(yùn)動(dòng)是指其整體或部件除質(zhì)心平動(dòng)以外的振動(dòng)、轉(zhuǎn)動(dòng)等微小運(yùn)動(dòng)。微動(dòng)在雷達(dá)回波中產(chǎn)生的多普勒稱為微多普勒[1-2]。進(jìn)動(dòng)是中段彈頭特有的微動(dòng)方式,與目標(biāo)形狀結(jié)構(gòu)、質(zhì)量分布和動(dòng)力學(xué)特性等物理屬性密切相關(guān)。進(jìn)動(dòng)作為一種分辨真假目標(biāo)的特征,受到廣泛關(guān)注。有研究表明,彈道中段,彈頭和誘餌的姿態(tài)運(yùn)動(dòng)差異較大,主要體現(xiàn)在進(jìn)動(dòng)周期、進(jìn)動(dòng)角等微動(dòng)參數(shù)上,微動(dòng)特征為非合作空間目標(biāo)探測(cè)與分類識(shí)別提供了一條可行的途徑,也成為了彈道中段目標(biāo)識(shí)別研究的熱點(diǎn)領(lǐng)域之一[3-5]。
彈道目標(biāo)進(jìn)動(dòng)的進(jìn)動(dòng)特征主要包括進(jìn)動(dòng)周期和進(jìn)動(dòng)角。對(duì)于進(jìn)動(dòng)周期提取相對(duì)容易,而進(jìn)動(dòng)角特征提取難度大。國(guó)內(nèi),國(guó)防科技大學(xué)、西安電子科技大學(xué)、航天科工集團(tuán)等多家單位開展了相關(guān)的研究,主要方法包括基于RCS幅度的提取方法、基于頻譜特征的提取方法、基于雷達(dá)高分辨距離像的提取方法等,已有多篇文章文獻(xiàn)刊出[6-9]。其中,文獻(xiàn)[6]中提出了一種利用目標(biāo)RCS的幅度值作為特征估計(jì)彈道目標(biāo)的進(jìn)動(dòng)角的方法,而對(duì)于非合作目標(biāo)難以預(yù)先獲得其精確的RCS。文獻(xiàn)[7]提出了利用時(shí)頻分析提取進(jìn)動(dòng)參數(shù)的方法,但僅適用于目標(biāo)零攻角飛行的情況。文獻(xiàn)[8]提出用一維距離像序列估計(jì)進(jìn)動(dòng)參數(shù),其方法也需要預(yù)知目標(biāo)尺寸等作為先驗(yàn)信息。
本文提出了基于寬帶雷達(dá)一維距離像的非合作錐體目標(biāo)微動(dòng)參數(shù)提取的新方法。首先得到目標(biāo)的一維距離像(high resolution range profile,HRRP)時(shí)間序列,再根據(jù)雷達(dá)測(cè)軌信息,估計(jì)得到彈道中段目標(biāo)的質(zhì)心位置,聯(lián)合使用目標(biāo)質(zhì)心位置與HRRP的徑向長(zhǎng)度特征,使用分步全局最優(yōu)估計(jì)算法得到飛行進(jìn)動(dòng)錐體的長(zhǎng)度、底面半徑、進(jìn)動(dòng)角、進(jìn)動(dòng)周期等參數(shù)。該方法需要的先驗(yàn)信息少,對(duì)于非合作目標(biāo)有較好的適用性。文中通過仿真數(shù)據(jù)驗(yàn)證了方法的可行性和正確性。
1 飛行中段進(jìn)動(dòng)目標(biāo)HRRP徑向長(zhǎng)度特征
飛行中段的進(jìn)動(dòng)錐體目標(biāo)的運(yùn)動(dòng)可以看作2種運(yùn)動(dòng)的合成:一是質(zhì)心的平動(dòng),由天體力學(xué)可知,在近似真空的環(huán)境中僅受萬(wàn)有引力的作用,其運(yùn)動(dòng)軌跡為橢圓,該橢圓的一個(gè)焦點(diǎn)為地心,橢圓所在平面被稱為飛行彈道面;另一種運(yùn)動(dòng)是錐體的進(jìn)動(dòng),即由于初始沖量力矩的影響,產(chǎn)生的以固定的角速度繞其質(zhì)心錐旋和自旋,本文考慮理想錐體目標(biāo),不考慮自旋對(duì)雷達(dá)回波影響。接下來(lái),分2步進(jìn)行討論:先忽略平動(dòng),分析固定質(zhì)心的進(jìn)動(dòng)對(duì)雷達(dá)回波的影響;然后再疊加平動(dòng),分析飛行中進(jìn)動(dòng)錐體的雷達(dá)回波特征。
1.1 固定質(zhì)心的進(jìn)動(dòng)目標(biāo)HRRP徑向長(zhǎng)度特征
考慮均勻的軸對(duì)稱,長(zhǎng)度為l,進(jìn)動(dòng)中心距離球頂為h,底面半徑為b。設(shè)進(jìn)動(dòng)角為γ,進(jìn)動(dòng)速率ω,雷達(dá)視線與進(jìn)動(dòng)軸夾角為β。如圖1所示。
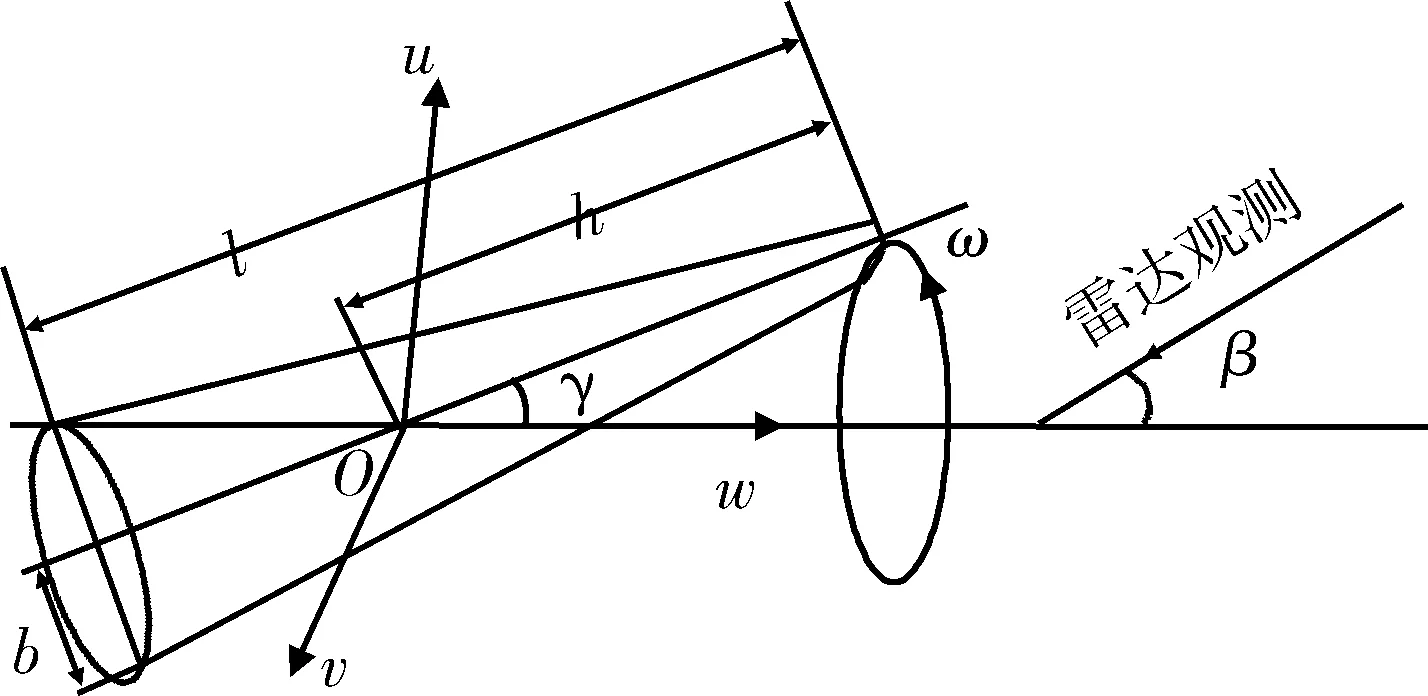
圖1 雷達(dá)觀測(cè)固定質(zhì)心的進(jìn)動(dòng)錐體Fig.1 Stationary precession cone in radar sight
建立進(jìn)動(dòng)的坐標(biāo)系Ouvw,設(shè)進(jìn)動(dòng)軸為w軸,將雷達(dá)視線與進(jìn)動(dòng)軸組成的平面定義為Ouw面,根據(jù)右手螺旋法則確定v軸指向。則進(jìn)動(dòng)錐體的對(duì)稱軸的指向可表示為
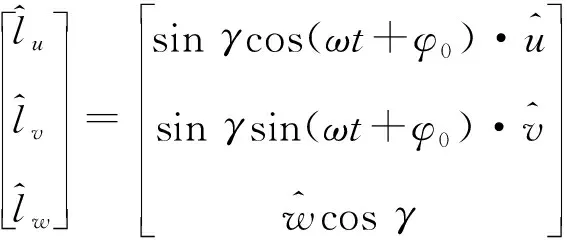
(1)
式中:φ0為觀測(cè)0時(shí)刻的進(jìn)動(dòng)轉(zhuǎn)角。
雷達(dá)視線矢量方向?yàn)?/p>
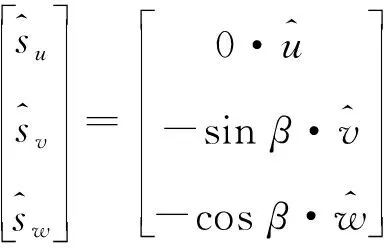
(2)
定義雷達(dá)視線與錐體對(duì)稱軸的夾角為雷達(dá)視線角,記為α(t),有

(3)
α(t)=arccoscosβcosγ+sinβsinγcos(ωt+φ0).
(4)
由空間幾何關(guān)系和電磁散射特性的知識(shí)可得,錐體有兩個(gè)強(qiáng)散射中心,分別在球頂和棱邊[10],錐體的HRRP長(zhǎng)度可表示為
L(t)=lcos(α(t))-bsin(α(t)).
(5)
由式(4),固定質(zhì)心的進(jìn)動(dòng)目標(biāo)一維距離像的徑向長(zhǎng)度呈周期性變化,令

(6)
tanη=b/l.
(7)
式(5)可變換為
L(t)=l′cos(η+α(t)).
(8)
則HRRP最小為
Lmin=l′cosβ+γ+η.
(9)
HRRP最大為
Lmax=l′cosβ-γ+η.
(10)
1.2 運(yùn)動(dòng)質(zhì)心的進(jìn)動(dòng)目標(biāo)HRRP徑向長(zhǎng)度特征
中段飛行的彈道導(dǎo)彈目標(biāo),當(dāng)完成軌道修正和誘餌釋放后,控制系統(tǒng)會(huì)調(diào)整彈頭指向保證其最佳再入角,所以在不考慮飛行誤差的情況下,可以認(rèn)為中段飛行的中后期,目標(biāo)的進(jìn)動(dòng)軸在彈道平面內(nèi),且指向固定[6]。如圖2所示。錐體沿彈道飛行,雷達(dá)視線與進(jìn)動(dòng)軸夾角是變化的,同時(shí)進(jìn)動(dòng)也導(dǎo)致了錐體軸指向的改變,上述2種運(yùn)動(dòng)共同引起了錐體雷達(dá)視線角的改變。
描述飛行的進(jìn)動(dòng)錐體雷達(dá)視線角隨時(shí)間的變化,定義2個(gè)坐標(biāo)系,雷達(dá)坐標(biāo)系Oxyz和進(jìn)動(dòng)坐標(biāo)系O′uvw。進(jìn)動(dòng)坐標(biāo)系的定義同前節(jié),設(shè)進(jìn)動(dòng)軸為O′w軸,并將觀測(cè)0時(shí)刻的雷達(dá)視線與進(jìn)動(dòng)軸組成平面定義為O′uw面。
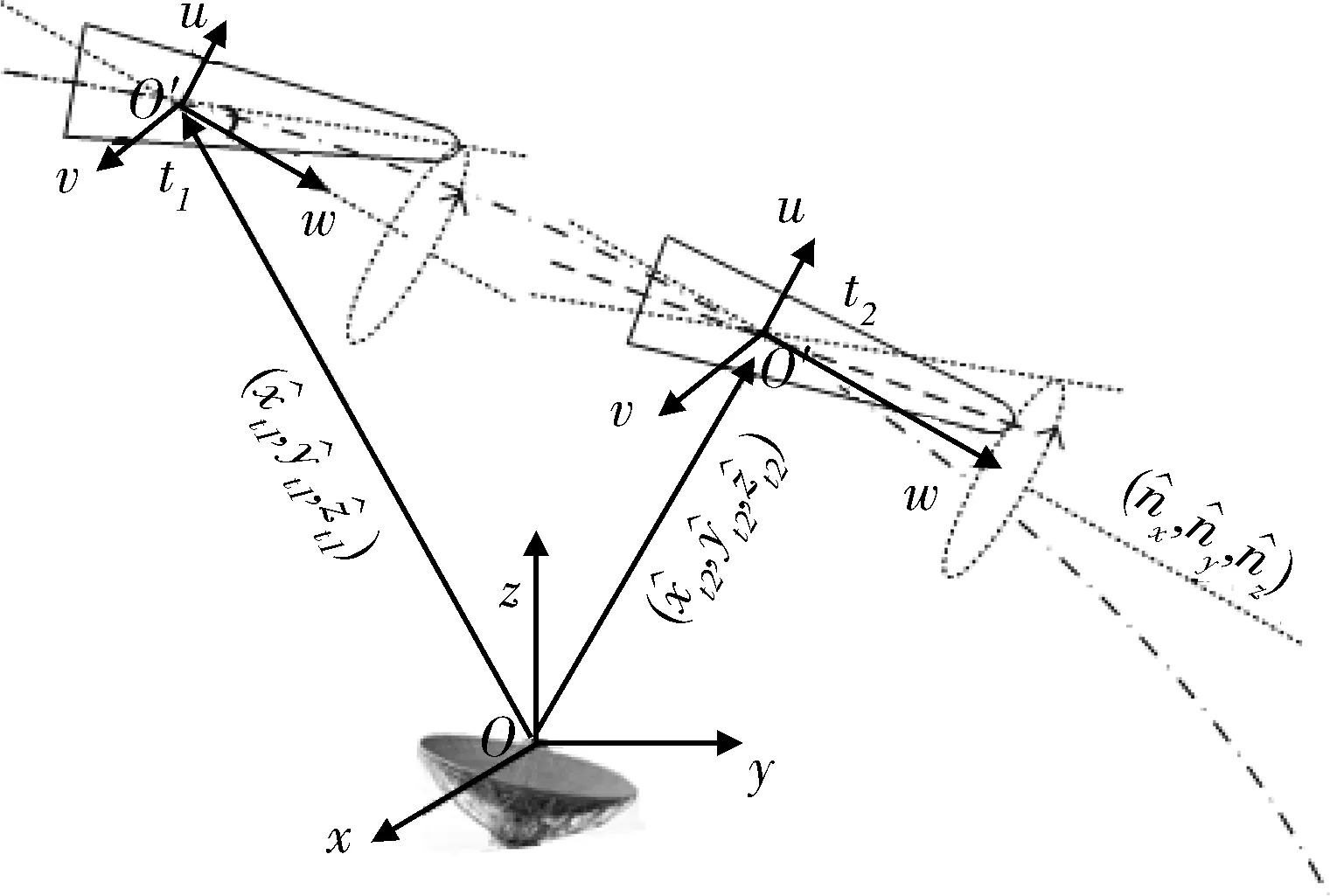
圖2 飛行的進(jìn)動(dòng)錐體示意圖Fig.2 Geometry of flying precession cone
(11)

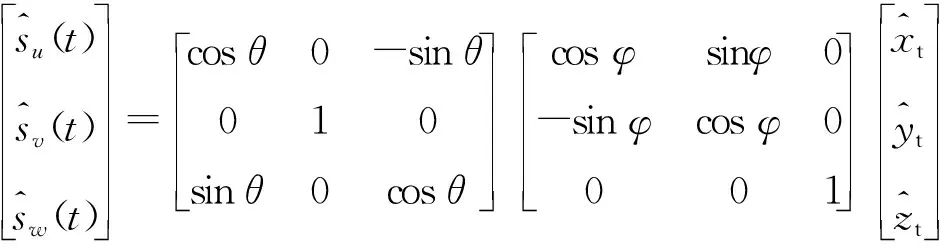
(12)
則進(jìn)動(dòng)錐體的對(duì)稱軸的方向矢量仍可表示為式(1)。將式(12)代入式(3)和(5)即可得到飛行的錐體的HRRP徑向長(zhǎng)度表達(dá)式:

(13)
cos(α(t))=atsinγcos(ωt+φ0)-
btsinγsin(ωt+φ0)+
ctcosγ.
(14)
式中:
(15)
設(shè)錐體長(zhǎng)度為l=4 m,b=0.5 m,進(jìn)動(dòng)角為γ=10°,進(jìn)動(dòng)速率ω=2π,進(jìn)動(dòng)軸在雷達(dá)坐標(biāo)系中θ=20°,φ=30°,又設(shè)飛行錐體的初始質(zhì)心位置坐標(biāo)為(x,y,z)=(200,50,200)km勻速飛行速度為(vx,vy,vz)=(-6,0,-4)km/s,并設(shè)φ0=0,計(jì)算得到HRRP徑向長(zhǎng)度如圖3所示。進(jìn)動(dòng)引起HRRP徑向長(zhǎng)度的起伏,但由于飛行的影響,周期不再是常量,HRRP徑向長(zhǎng)度的極大值和極小值也隨飛行時(shí)刻而改變。徑向長(zhǎng)度隨時(shí)間的改變?yōu)檫M(jìn)動(dòng)參數(shù)的估計(jì)提供了條件。
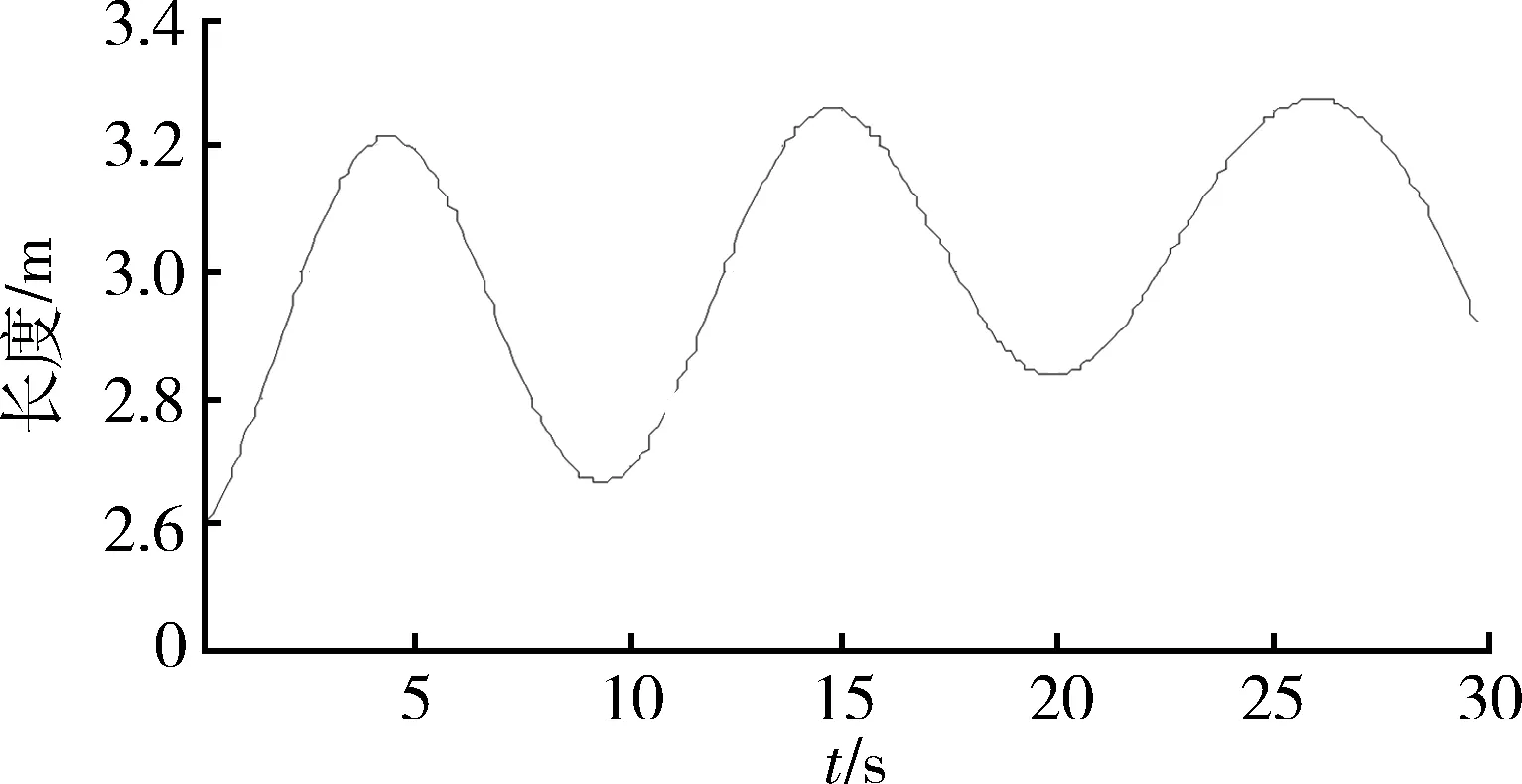
圖3 飛行進(jìn)動(dòng)錐體的HRRP徑向長(zhǎng)度Fig.3 HRRP length of flying precession cone
2 飛行進(jìn)動(dòng)錐體目標(biāo)的微動(dòng)參數(shù)估計(jì)
min(max)f(x),s.t.x∈S.
(16)
對(duì)應(yīng)于本文的數(shù)學(xué)模型,最優(yōu)估計(jì)表達(dá)式為
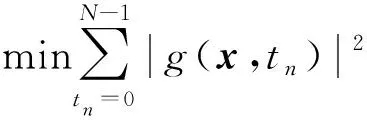
(17)
式中:

(18)

(19)
式(18)中有2個(gè)三角函數(shù),且未知量多,計(jì)算復(fù)雜,直接估計(jì)困難大。為了提高估計(jì)效率,減小計(jì)算難度,本文采用分步全局最優(yōu)估計(jì)法:首先將數(shù)學(xué)模型簡(jiǎn)化初估,得到未知量的粗估值;再將粗估值作為二次估計(jì)的初值,并進(jìn)一步縮小各參數(shù)搜索范圍后,利用精確模型再次優(yōu)化,最終得到的未知量精確解。
模型的簡(jiǎn)化過程為:對(duì)于錐體,當(dāng)l?b,且從頭部附近觀測(cè)時(shí)有
L(t)≈lcos(α(t)).
(20)
所以可近似簡(jiǎn)化為
(21)
與原數(shù)學(xué)模型相比,新模型少了一個(gè)未知量,而且方程中只剩一個(gè)的三角函數(shù)的計(jì)算,估計(jì)更容易。
利用(21)得到x的初步估計(jì)后,根據(jù)粗估值,縮小搜索范圍,通過精確模型(18)進(jìn)行二次估計(jì),得到最終結(jié)果。為了避免最優(yōu)解中存在局部最優(yōu)的問題,一方面根據(jù)參數(shù)的物理意義,增加約束條件,限制其值域;另一方面可采取變換初值多次估計(jì)的方法,以確保結(jié)果的準(zhǔn)確。
綜上,對(duì)飛行進(jìn)動(dòng)錐體的微動(dòng)參數(shù)估計(jì)的具體步驟為:
(2) 利用簡(jiǎn)化的HRRP徑向長(zhǎng)度模型式(20)對(duì)(14)和(15)中的參數(shù)粗估計(jì);
(3) 利用參數(shù)粗估計(jì)的結(jié)果,縮小參數(shù)的搜索范圍;
(4) 利用精確表達(dá)式(13)進(jìn)行二次全局優(yōu)化,估計(jì)得到進(jìn)動(dòng)參數(shù)的估計(jì)值。
3 仿真結(jié)果及分析
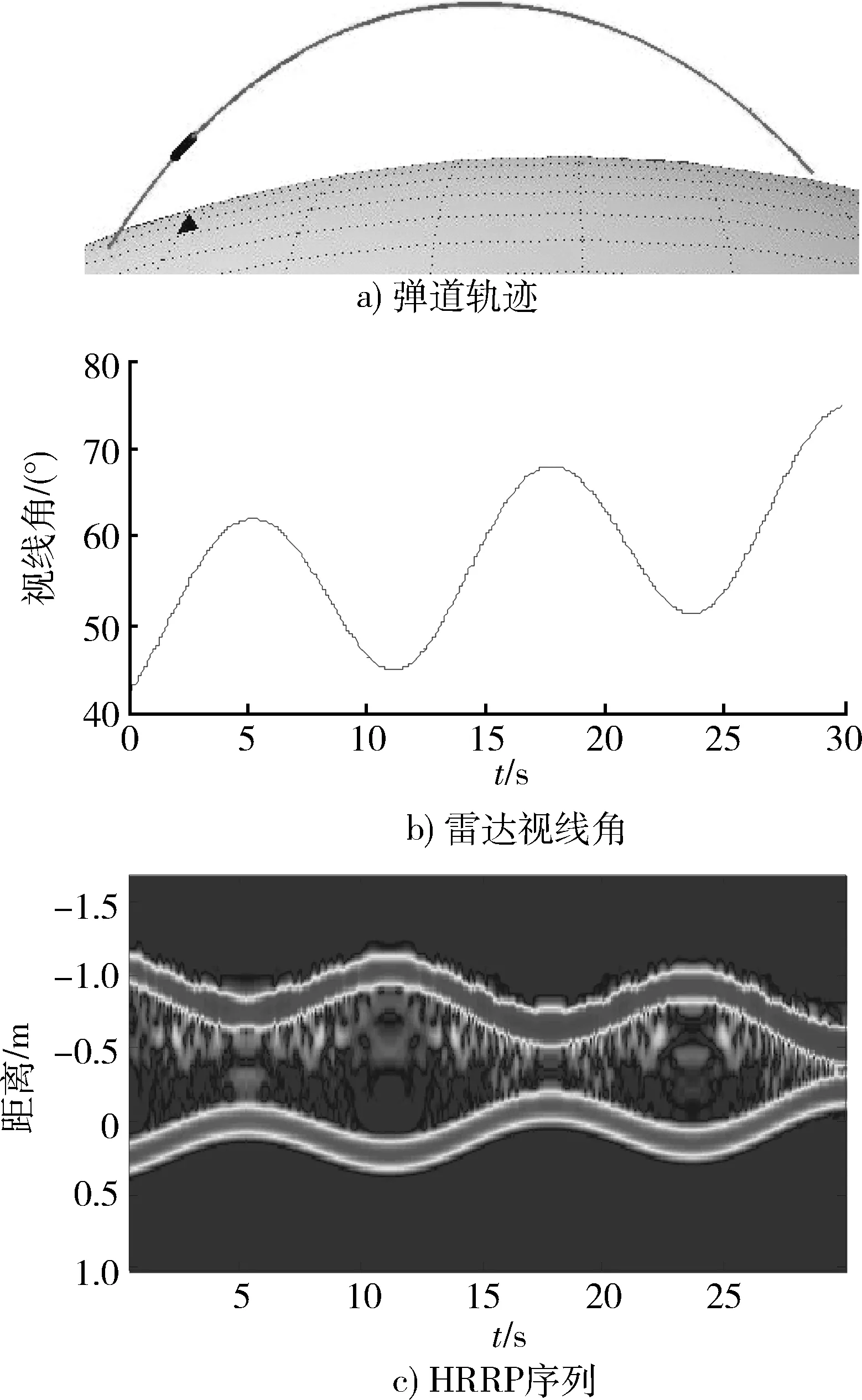
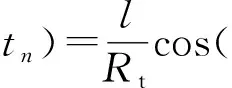
圖4 仿真結(jié)果Fig.4 Simulated results
表1 微動(dòng)參數(shù)估計(jì)結(jié)果Table 1 Estimated results of precession parameters

進(jìn)動(dòng)角/(°)進(jìn)動(dòng)周期/s圓錐高度/m底面半徑/m9.9112.534.010.36
仍利用上述彈道和雷達(dá)參數(shù),改變進(jìn)動(dòng)角和進(jìn)動(dòng)周期,估計(jì)的結(jié)果如表2所示。
由表2,本文方法能夠在不同進(jìn)動(dòng)狀態(tài)下對(duì)進(jìn)動(dòng)參數(shù)進(jìn)行估計(jì)。對(duì)進(jìn)動(dòng)角、進(jìn)動(dòng)周期、圓錐高度的估計(jì)效果好,誤差均小于10%。其中進(jìn)動(dòng)周期的估計(jì)準(zhǔn)確度最好,對(duì)進(jìn)動(dòng)角和圓錐高度估計(jì)的準(zhǔn)確度次之,而對(duì)底面半徑的估計(jì)效果較差。
分析其原因?yàn)椋河捎诶走_(dá)帶寬的限制,HRRP徑向長(zhǎng)度提取存在誤差。徑向長(zhǎng)度的誤差會(huì)導(dǎo)致進(jìn)動(dòng)參數(shù)的誤差。該誤差對(duì)周期參數(shù)的影響最小,故對(duì)周期的估計(jì)效果最好。而根據(jù)第2節(jié)分析,錐體的底面半徑對(duì)HRRP徑向長(zhǎng)度的影響很小,近似可以忽略;所以利用HRRP長(zhǎng)度反推底面半徑時(shí),精度也不高。
表2 不同參數(shù)微動(dòng)參數(shù)估計(jì)結(jié)果Table 2 Estimated results of several precession parameters
4 結(jié)束語(yǔ)
本文提出了一種基于HRRP時(shí)間序列和雷達(dá)測(cè)軌信息的飛行進(jìn)動(dòng)錐體目標(biāo)微動(dòng)參數(shù)的估計(jì)方法,能夠正確估計(jì)進(jìn)動(dòng)角、進(jìn)動(dòng)周期、錐體高度等參數(shù),上述參數(shù)可以作為識(shí)別特征量用于目標(biāo)的分類識(shí)別。仿真結(jié)果證明了方法的可行性和正確性。該方法可以應(yīng)用于特征提取和目標(biāo)識(shí)別領(lǐng)域。文中仿真計(jì)算未討論雷達(dá)測(cè)量誤差等不確定因素,在后續(xù)工作中還需要進(jìn)一步研究雷達(dá)測(cè)量誤差和信噪比等對(duì)估計(jì)精度的影響。
參考文獻(xiàn):
[1] 周萬(wàn)幸. 彈道導(dǎo)彈雷達(dá)目標(biāo)識(shí)別技術(shù)[M].北京:電子工業(yè)出版社,2011.
ZHOU Wan-xing. BMD Radar Target Recongnition Technology[M].Beijing:Publishing House of Electronics Industry, 2011.
[2] CHEN V C, LI Fa-yin, Shen-Shyang Ho, et al.Micro-Doppler Effect in Radar: Phenomenon, Model, and Simulation Study[J]. IEEE , 2006,42(1):2-21.
[3] 李松,馮有前,劉昌云,等. 彈道導(dǎo)彈微動(dòng)模型及微多普勒特征研究[J]. 現(xiàn)代防御技術(shù),2011,39(6):95-100.
LI Song, FENG You-qian, LIU Chang-yun, et al. Research of Micro-Motion Model and Micro-Doppler of Ballistic Missile[J]. Modern Defence Technology, 2011, 39(6):95-100.
[4] 馬梁,王雪松,李永禎,等. 雷達(dá)部署對(duì)進(jìn)動(dòng)目標(biāo)微多普勒頻率的可測(cè)性分析[J]. 國(guó)防科技大學(xué)學(xué)報(bào),2011(4):54-59.
MA Liang, WANG Xue-song, LI Yong-zhen, et al. Influence of Radar Location on the Measurability of Micro-doppler Detecting for Precession Target[J]. Journal of National University of Defense Technology, 2011(4): 54-59.
[5] 高紅衛(wèi),文樹梁,謝良貴. 雷達(dá)脈沖串波形下的目標(biāo)微動(dòng)特征提取[J]. 現(xiàn)代防御技術(shù),2009,37(5),132-135.
GAO Hong-wei, WEN Shu-liang, XIE Liang-gui. Target Micromotion Feature Extraction from Radar Pulse Train Waveform[J]. Modern Defence Technology, 2009, 37(5), 132-135.
[6] 陳行勇,黎湘,郭桂榮,等. 微進(jìn)動(dòng)彈道導(dǎo)彈目標(biāo)雷達(dá)特征提取[J]. 電子與信息學(xué)報(bào),2006,28(4): 643-646.
CHEN Hang-yong, LI Xiang, GUO Gui-rong, et al. Radar Feature Extraction of Micro-precession Ballistic Missile Warhead[J]. Journal of Electronics & Information Technology, 2006, 28(4): 643-646.
[7] 關(guān)永勝,左群聲,劉宏偉,等. 空間進(jìn)動(dòng)目標(biāo)微動(dòng)參數(shù)估計(jì)方法[J]. 電子與信息學(xué)報(bào),2011,33(10):2427-2432.
GUAN Yong-sheng, ZUO Qun-sheng, LIU Hong-wei, et al. Micro-motion Parameters Estimation of Space Precession Targets[J]. Journal of Electronics & Information Technology, 2011, 33(10): 2427-2432.
[8] 賀三思,周建雄,付強(qiáng),利用一維距離像序列估計(jì)彈道中段目標(biāo)進(jìn)動(dòng)參數(shù)[J]. 信號(hào)處理,2008,25(6): 925-929.
HE San-si, ZHOU Jian-xiong, FU Qiang. Using HRRP Sequence to Estimate the Precession Parameters of Midcourse Target[J]. Signal Processing, 2008, 25(6): 925-929.
[9] 高紅衛(wèi),謝良貴,文樹梁,等. 彈道導(dǎo)彈目標(biāo)微多普勒特征提取[J].雷達(dá)科學(xué)與技術(shù),2008,6(2),96-101.
GAO Hong-wei, XIE Liang-gui, WEN Shu-liang, et al. Micro-Doppler Feature Extraction of Ballistic Missile Targets[J]. Radar Science and Technology, 2008, 6(2), 96-101.
[10] 黃培康,殷紅成,許小劍. 雷達(dá)目標(biāo)特性[M]. 北京:電子工業(yè)出版社,2005.
HUANG Pei-kang, YIN Hong-cheng, XU Xiao-jian. Radar Target Characteristic[M]. Beijing:Publishing House of Electronics Industry,2005.
[11] 彭拯.全局優(yōu)化的水平值逼近理論與算法研究[D].上海:上海大學(xué),2009.
PENG Zheng. A Study on Theory and Algorithms of Level-Value Approximation to Global Optimization[D].Shanghai: Shanghai University, 2009.
[12] 袁莉,陶巍. 彈道導(dǎo)彈目標(biāo)的距離像特性與特征分析[J]. 制導(dǎo)與引信,2009,30(2):7-11.
YUAN Li, TAO Wei. Characteristics and Feature Analysis of Range Profile for Ballistic Missile Target[J]. Guidance & Fuze, 2009, 30(2): 7-11.
[13] 溫曉楊,盧大威,張軍. 快時(shí)間域微振動(dòng)對(duì)高分辨距離像畸變分析[J]. 現(xiàn)代防御技術(shù),2010,38(6):126-131.
WEN Xiao-yang, LU Da-wei, ZHANG Jun. HRRP Distortion Analysis of Vibration Scatters in Fast Time Domain[J]. Modern Defence Technology, 2010, 38(6), 126-131.
[14] 徐慶,王秀春,李青. 基于高分辨一維像的目標(biāo)特征提取方法[J]. 現(xiàn)代雷達(dá),2009,31(6):60-63.
XU Qing, WANG Xiu-chun, LI Qing. Extraction of Target Feature Using High Resolution Range Profile[J]. Modern Radar, 2009, 31(6): 60-63.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56