基于成像質量的進動參數估計*
2014-07-10 09:41:14趙會寧賀思三龍戈農張永順
現代防御技術 2014年2期
趙會寧,賀思三,龍戈農,張永順
(空軍工程大學 防空反導學院,陜西 西安 710051)
0 引言
彈道導彈防御系統中的目標識別技術是當前研究熱點,而彈道中段射程和飛行時間占全彈道的80%~90%以上,可以實現較長時間的識別與攔截,是導彈防御的關鍵階段。彈頭在中段可釋放各種假目標進行欺騙和干擾,使中段攔截面臨巨大挑戰,如何有效識別真、假彈頭是中段防御的核心問題之一。自2000年以來,隨著對目標微動效應的深入研究,應用微動特征識別目標引起了研究人員的廣泛關注,進動作為空間椎體目標的重要運動特征,為彈道目標中段真假彈頭識別提供了新的解決手段。
對中段目標進動特性的研究主要分為2類:中段進動彈頭運動及雷達回波建模[1-2]與基于進動參數估計[3-9]。在運動建模方面,主要關注于如何在考慮平動、自旋、進動的基礎上對中段目標的運動進行描述,并分析其微多普勒特征。在進動參數估計方面,所關注的參數包括進動周期及進動角2個參數。進動周期參數主要從回波信號的周期特性獲得,參數估計方法物理意義明確;而進動角參數估計算法則相對復雜。在研究初期,所提進動角參數估計算法往往需要先驗信息,如文獻[3-5]要求知道目標的結構先驗信息,文獻[6]要求知道雷達視線角的先驗信息。為了克服先驗信息的限制,文獻[7-8]分別提出了基于ISAR序列和距離像序列的進動角估計方法,這2種算法要求雷達入射方向發生較大變化,所需觀測時間較長;文獻[9-10]研究了基于多站觀測的進動角估計算法,利用多站觀測信息的互補性,它們可在較短時間內(1個周期)實現無先驗信息條件下的進動參數估計。
本文對進動參數估計展開深入研究,提出了基于成像質量的進動參數估計思想,設計了相應的搜索參數降維方法,使得只需通過對進動角的一維搜索就可得到進動參數的估計。該算法能夠在沒有先驗信息的條件下僅利用單站雷達的觀測信息在一個進動周期內實現進動參數估計。
1 彈頭目標寬帶散射特性及進動模型
常見的彈頭外形有平底錐彈頭、球底錐彈頭、平底錐柱彈頭及球底錐柱彈頭,本文以平底錐彈頭為例對進動目標參數估計進行研究。
1.1 彈頭目標寬帶散射特性分析
平底錐彈頭結構如圖1所示。
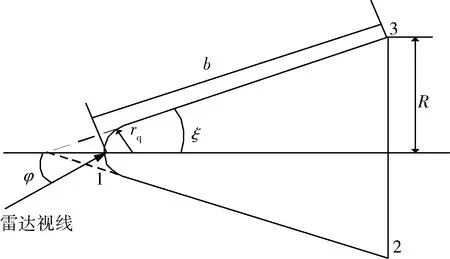
圖1 平底錐彈頭模型Fig.1 Model of conical warhead
圖1中rq為球冠半徑,ξ為半錐角,R為底面半徑,b為球冠中心到底面邊緣的距離,φ為雷達視線與錐體對稱軸的俯仰角。對于錐形彈頭而言,當底部半徑一定時,半錐角減小則彈頭的RCS、錐面最大氣動壓力、氣動加熱率和氣動阻力都將減少,因此,適當減小半錐角有利于提高彈頭飛行性能;但半錐角減小將使彈頭加長,且彈頭加長后側面積隨之增加,彈頭防熱與承力結構的質量也要增加。綜合考慮各種因素,彈頭半錐角可取范圍一般為7°~11°[11]。由此可得如下性質:
性質1:彈頭半錐角ξ可取范圍一般為7°~11°。
性質2:目標在雷達視線方向的投影長度將隨著φ的增大而減小。
性質3:在此角度變化范圍內,對數據成二維像后橫向距離(或縱向距離)差別最大2個散射中心的連線對應了靠近雷達視線方向錐面所在位置。
性質3是由于目標的遮擋效應造成的:當雷達視線方向指向一側時,另一側被遮擋,從而只有靠近雷達視線方向彈面上的等效散射中心才可見,具體內容可參考文獻[12]。
1.2 中段目標進動模型
由于平底錐彈頭是旋轉對稱的,其散射特性只與俯仰角有關,而與方位角無關,因此只需考慮φ的變化對散射特性的影響。對于中段進動目標,假設雷達視線方向在平動坐標系中的俯仰角為γ,進動角速度為ωP,進動角為θP,雷達視線方向在平動坐標系中的俯仰角為γ,初始方位角為φP,可得俯仰角φ隨時間的變化為[3]
cosφ(m)=cosγcosθP+sinγsinθPcos(ωPmTr+φP),
(1)
式中:Tr為雷達脈沖周期;m為采樣時刻。
從而可得
φ(m)=arccos[cosγcosθP+sinγsinθPcos(ωPmTr+φP)].
(2)
根據式(2)可知,進動彈頭的角度變化具有如下性質:
2 基于成像質量的進動參數估計
利用高分辨雷達對進動彈頭觀測時,其回波可表示為
ycosφ(m))}dxdy,
(3)
式中:D為目標所在區域;I(x,y)為目標的散射系數;ki=2fi/c為波數,其最小值為kmin,最大值為kmax;f為雷達頻率;c為光速。
濾波逆投影算法直接利用極坐標格式數據再現目標圖像,可實現目標的精密成像,其離散化的成像算法可表示為
exp(j2πkmin(xsinφ(m)+ycosφ(m))).
(4)
該算法直接利用極坐標格式數據對目標散射強度分布進行重構,只有當設定角度變化與實際角度變化一致時,才能得到最好的圖像效果。基于此性質,彈頭的進動參數可通過下式進行估計:

(5)

(6)
理論上說,通過對式(5)的優化可估計進動參數。但濾波逆投影算法快速算法本身計算量大,且直接對式(5)進行優化需進行四維搜索,總運算量非現有計算能力可實現,需要對搜索參數降維處理。
2.1 基于軸對稱特性的ωP,φP估計
(7)
式中:Imag(F)為對數據進行二維傅里葉變換所得成像結果。根據φ(m)的軸對稱性質,可知CP(m)將每隔半個周期出現一個峰值,且峰值位置對應時刻的相位為kπ,雷達回波關于此時刻左右對稱。
不妨設經過上述處理后估計出2個相鄰對稱軸對應采樣時刻分別為m1,m2,從而可得ωP與φP的估計為
(8)

2.2 進動角估計
(9)
式(9)表明通過二維搜索可得到θP與γ的估計,考慮到濾波逆投影算法本身運算量大,下面基于彈頭目標的散射特性及結構特性進一步將參數搜索降至一維。
一般來說,進動角度比較小,通常為5°~10°,式(2)可作如下近似:
φ(m)≈γ-θPcos(ωPmTr+φP).
(10)
φ(m)≈γ+θPsinωP(m-mc)Tr+kπ≈
(11)

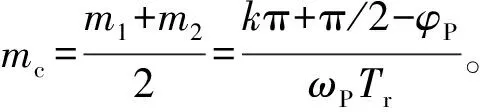
根據圖2可知,雷達視線方向可表示為φ=φl-ξ,其中φl為雷達視線方向與可見彈面的夾角,而在[mka-L2,mka+L2]段數據的中心角為φ≈γ,從而可得:
(12)
式(2)中包含了Δθ與ξ2個未知參數。根據性質(1),半錐角ξ可選范圍很小,不妨將其設為固定值ξ=9°;而在設定θP的情況下,Δθ可根據所選L2的長度由式(10)計算得到
Δθ≈2θPsinωPL2Tr.
(13)
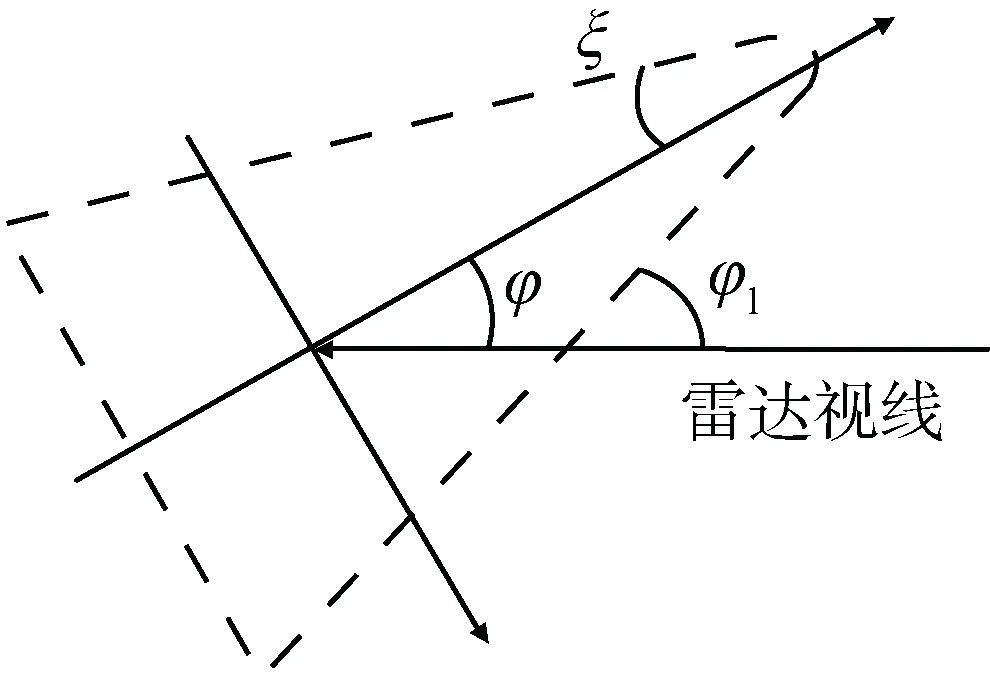
圖2 平底錐彈頭的φ,φl,ξ關系Fig.2 Relationship between φ,φl,ξ for conical warhead
上述分析表明,在設定θP的情況下,γ與θP存在對應關系,式(9)可進一步簡化為
(14)
3 仿真試驗
在本節仿真試驗中,均取Tr=0.005 s,L1=30,L2=roundm2-m1/4,在進行估計時設定半錐角為9°,其中round為取整函數。
設平底錐參數為R=0.6 m,rq=0.075 m,b=3.067 m,利用電磁計算軟件計算其在0°~180°俯仰角下10 ~12 GHz頻率范圍內的寬帶回波數據,計算時角度間隔為0.2°,頻率間隔為30.3 MHz。設置進動參數為γ=50°,θP=7°,φP=π/2,進動周期為2 s,觀測時間為2 s。基于彈頭電磁計算數據,通過角度的一維插值得到計算俯仰角處對應數據,并加入噪聲使總體信噪比為0 dB,其距離像序列如圖4a)
圖3 基于成像質量的進動參數估計流程Fig.3 Precession parameters estimation procedure based on image quality

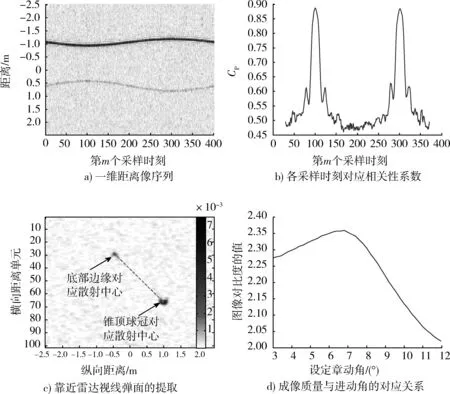
圖4 平底錐彈頭的進動參數估計Fig.4 Precession parameters estimation for conical warhead
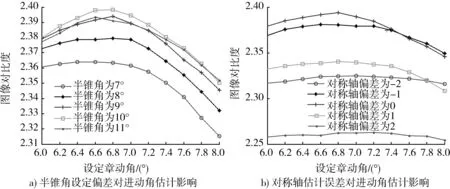
圖5 誤差對進動角估計的影響Fig.5 Error influence for precession angle estimation
4 結束語
本文首先對彈頭目標的寬帶散射特性進行了分析,指出彈頭目標在雷達視線方向上的投影長度將隨著俯仰角的增大而減小,且其二維成像結果的強散射中心分布在靠近雷達視線方向的彈面上;然后基于旋轉對稱彈頭的進動模型,提出了一種基于成像質量的進動參數估計算法,設計了相應的搜索參數降維流程,使得只需通過對進動角的一維搜索就可得到進動參數估計。該算法合理挖掘了彈頭的結構特性及散射特性,可在一個進動周期內實現未知結構尺寸的平底圓錐彈頭的進動參數估計。
參考文獻:
[1] 馬梁,劉進,王濤,等. 旋轉對稱目標滑動型散射中心的微Doppler特性[J].中國科學, 2011, 41(5):605-616.
MA Liang, LIU Jin, WANG Tao, et al. Micro-Doppler Characteristics of Sliding-Type Scattering Center on Rotationally Symmetric Target[J]. Sience China, 2011, 41(5):605-616.
[2] 李松,馮有前,劉昌云,等.彈道導彈微動模型及微多普勒特征研究[J]. 現代防御技術,2011,39(6):85-116.
LI Song, FENG You-qian, LIU Chang-yun, et al.Resarch of Micro-Motion Model and Micro-Doppler of Ballistic Missile[J].Modern Defence Technology, 2011,39(6):85-116.
[3] 賀思三,周劍雄,付強. 利用一維距離像序列估計彈道中段目標進動參數[J].信號處理,2009,25(6):925-929.
HE Si-san, ZHOU Jian-xiong, FU Qiang. Using HRRP Sequence to Estimate the Precession Parameters of Midcourse Target [J]. Signal Processing, 2009, 25(6): 925-929.
[4] 朱玉鵬,王宏強,黎湘,等. 基于一維距離像序列的空間彈道目標微動特征提取[J]. 宇航學報, 2009, 30(3):1133-1140.
ZHU Yu-peng, WANG Hong-qiang, LI Xiang, et al. Micro-Motion Feature Extraction of Spatial Ballistic Target Based on HRRP Dynamic Sequence[J]. Journal of Astronautics, 2009, 30(3): 1133-1140.
[5] 李康樂,姜衛東,黎湘. 彈道目標微動特征分析與提取方法[J]. 系統工程與電子技術,2010,32(1):115-118.
LI Kang-le, JIANG Wei-dong, LI Xiang. Micro-Motion Feature Analysis and Extraction Methods for Ballistic Targets[J].Systems Engineering and Electronics,2010,32(1):115-118.
[6] 雷騰,劉進忙,余付平,等.基于時間一距離像的彈道目標進動特征提取新方法[J].信號處理,2012,28(1):73-79.
LEI Teng, LIU Jin-mang, YU Fu-ping, et al. A New Procession Signature Extraction Method of Ballistic Target Based on Range-Profile[J]. Signal Processing, 2012, 28 (1):77-83.
[7] 金光虎,朱玉鵬,高勛章,等.基于一維像序列的中段雷達目標進動特征提取[J]. 信號處理,2009,25(5):771-776.
JIN Guang-hu, ZHU Yu-peng, GAO Xun-zhang,et al. Precession Feature Extraction of Midcourse Radar Target Based on HRRP Series[J].Signal Processing, 2009,25(5):771-776.
[8] 顏維,孫文峰,錢李昌,等.基于一維像序列的彈道中段目標進動特征提取[J]. 空軍雷達學院學報, 2011,25(2):87-96.
YAN Wei, SUN Wen-feng, QIAN Li-chang, et al. Precession Feature Extraction of Ballistic Midcourse Target Based on HRRP Sequences[J]. Journal of Air Force Radar Academy, 2011, 25(2):87-96.
[9] 艾小鋒,李永禎, 趙鋒, 等. 基于多視角一維距離像序列的進動目標特征提取[J].電子與信息學報, 2011, 33(12):2846-2851.
AI Xiao-feng, LI Yong-zhen, ZHAO Feng, et al. Feature Extraction of Precession Targets Using Multi-Aspect Observed HRRP Sequences[J]. Journal of Electronics & Information Technology, 2011, 33(12):2846-2851.
[10] 雷騰,劉進忙,楊少春,等. 基于三站一維距離像融合的彈道目標特征提取方法研究[J].宇航學報, 2012, 33(2):228-234.
LEI Teng,LIU Jin-mang,YANG Shao-chun, et al. Study on Feature Extraction Method of Ballistic Target Based on Three-Station Range Profiles[J]. Journal of Astronautic, 2012, 33(2):228-234.
[11] 王國雄. 彈頭技術(上)[M]. 北京:宇航出版社, 1993.
WANG Guo-Xiong. Warhead Technology[M]. Beijing: Aerospace Publishing House,1993.
[12] 黃培康, 殷成紅, 許小劍.雷達目標特性[M]. 北京:電子工業出版社, 2005.
HUANG Pei-kang, YIN Cheng-hong, XU Xiao-jian. Radar Targets Characteristics[M]. Beijing: Publishing House of Electronics Industry,2005.