基于要地防護的分布式火控系統研究*
2014-07-10 09:41:32郭新勝壽少峻黨力趙創社韓偉
現代防御技術 2014年2期
關鍵詞:系統
郭新勝,壽少峻,黨力,趙創社,韓偉
(西安應用光學研究所,陜西 西安 710065)
0 引言
現代高技術條件下的局部戰爭對以指揮工程為代表的重要軍事目標的生存和保障能力提出了新的挑戰和更高的要求。空襲方多利用巡航導彈、精確制導炸彈等精確制導武器進行精確、迅速的點打擊[1]。此類武器的攔截偏重于中遠程攔截、摧毀,但隨著軍事科技的快速發展,來襲導彈的快速突防能力得到大幅提升,使得防御有效時間變短,很難對來襲目標實施完全攔截。
在超近程范圍內,目前尚無有效的防御手段, 所以重點城鎮、軍事要地等關鍵地域的威脅就被凸現出來,對于要地的超近程防護也成為近年來國內外各國大力發展的一項關鍵技術。本文針對要地的超近程防護分布式火控系統進行了深入研究,著重研究分布式火控系統的原理、組成,及其結構體系和關鍵技術,為超近程防護分布式火控系統的研制提供一些參考價值。
1 超近程防護分布式火控系統
要地的超近程防護系統主要是針對國家重要目標的安全防護,包括政治經濟中心、首腦機關、重要工程、軍事要地、工業基地、重要交通樞紐的防護。依據要地的防護特點,其主要由光電單元,雷達單元、若干火力單元組成,形成一個嚴密的超近程防護網,以確保要地的安全[2-3]。
目前國內外在要地防空發展迅速[4-5],例如美國“密集陣”近距防空武器系統的火炮為6管20 mm“加特林”火炮,每分鐘可射3 000發,探測跟蹤發射全部自動化,是目前世界上唯一能實行自動搜索、探測、評估、跟蹤和攻擊目標的超近程防御武器系統。它采用搜索雷達、跟蹤雷達和火炮三位一體的結構,其全部作戰均由高速計算機控制完成,不需人工操作,反應速度極快,跟蹤距離為10 km。荷蘭、美國“守門員”7管30 mm近程防御武器系統, 發射率4 200發/min,射程3 000 m,該系統可以用來抗擊400~500 m內低空(5 m高度)飛行反艦巡航導彈,也可攻擊來襲飛機。
超近程分布式火控系統由多個火力單元、光電單元、雷達單元、火控單元等構成。它們分散布置在需要防護的要地四周,由火控單元統一協調指揮控制,完成對要地的超近程防護,達到最佳防御效果。戰場布設如圖1所示[5]。
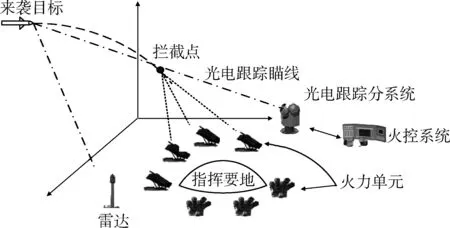
圖1 超近程分布式火控系統結構圖Fig.1 Ultra-short-range distributed fire control system structure
其主要工作流程:首先雷達遠距離發現、跟蹤目標,并引導光電跟蹤系統跟蹤來襲目標,建立來襲目標的彈道航跡,由火控系統判斷目標的威脅程度,預測來襲目標的運動軌跡。再依據系統反應時間、火力單元等因素,實時外推出最佳攔截點或者攔截區域,并計算出采用哪幾組火力單元組合發射攔截,能夠達到最佳攔截效果。超近程分布式火控結構體系設計打破了傳統的雷達、光電傳感器與火控解算為一體高炮防空體系結構,充分發揮各分系統的特點,提高超進程防御的信息利用率,極大地縮短了火力單元的反應時間。采用新的火控機理,快速解算,使火控系統具有復雜背景條件下對付高速、低角、機動小型目標的能力[6]。
分布式火控系統設計組成,如圖2所示。
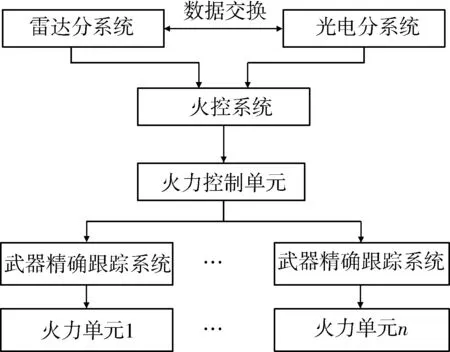
圖2 超近程分布式火控系統組成Fig.2 Ultra-short-range distributed fire-control system
2 關鍵技術分析
超近程防空分布式火控系統的任務是及時準確地將攔截彈丸(戰斗部)發射到預毀傷的目標區域或直接命中目標。要完成這一任務,需要先搜索發現目標、識別目標,確定預攔截的目標,連續跟蹤測量目標運動參數,再依據測量的數據建立目標的航跡,實時計算射擊諸元并控制火力系統瞄向預定攔截點,選擇不同的彈種,在最佳時刻發射,實現攔截,上述任務均由火控系統完成[7]。因此, 火控系統是武器系統的“大腦”,雷達、光電是武器系統的“眼睛”,是人眼觀察視野的拓展、作用距離的延長以及大腦思維判斷及運算能力在機器上的體現,解脫了人對武器的繁重體能操作和瞄準[8-11]。而要完成這些,首先要解決7個關鍵問題:
(1) 分布式火控系統的網絡控制技術
由于本系統由多個火力單元組成,系統要實現對多個火力單元的調度和分配,必須通過快速網絡互連和管理,而且各種目標數據、過程數據、武器數據等也需要通過網絡與數據庫進行交互。對目標進行威脅估計和排序,多個目標還需完成目標分配,然后對目標參數進行濾波,判斷攻擊決策條件,在滿足攻擊決策條件時利用解命中問題的求解方法進行預定攔截點、攔截開火時間和火控諸元的計算,然后將火控諸元實時分發給武器系統進行隨動控制。在該系統中快速可靠的網絡能夠滿足系統的要求。
(2) 分布式火控諸元的快速解算技術
本火控系統屬于超近程防護。從發現目標至目標到達僅有3~5 s的時間,留給火控系統的反應時間非常短。傳統的高炮火控解算對快速小目標的攔截計算難以滿足系統的精度要求,必須探索新的火控原理和模型,實現從搜索捕獲、數據錄取、威脅判斷、目標指示、火力組織、跟蹤解算到武器瞄準等全過程的自動控制。處理過程需要根據光電分系統的輸入輸出信息,進行坐標轉換、濾波、預測與誤差補償等工作,完成火控系統射擊諸元快速計算,并進行諸元實時傳遞。
(3) 全系統精度分析技術各項誤差分析
射擊精度的分析是對火控模型進行檢驗和驗證的必要步驟,通過射擊精度的分析不但可以判斷射擊結果是否滿足系統指標要求,還可以確定影響系統精度的主要因素。通過對主要影響因素的修正實現對火控模型進行優化。精度分析將在考慮不同傳感器會產生各種誤差源的條件下進行多次Monte Carlo仿真,計算出整個武器系統的平均瞄準跟蹤精度、攻擊精度、平均作戰響應時間、平均攔截精度。通過靈敏度分析方法可以確定各種因素對系統精度的影響程度和趨勢。
(4) 分布式火力單元組合效能分析
由于超近程防護系統含有多個火力單元,分散布設在要地的四周。在攔截來襲目標時,針對不同位置的來襲目標,采用那些火力單元進行組合發射攔截,采用一個火力單元或幾個火力單元,或全部火力單元發射攔截,如何組合能夠發揮火力單元的最佳費效比。通過建立模型進行仿真分析,將實驗所得數據,進行多次Monte Carlo模擬仿真,期望達到最佳的火力單元攔截組合,為設計提供依據。
(5) 火力單元發射時刻的計算
火力單元發射時間計算根據預定攔截點位置、目標位置與速度、炮彈的速度與彈道軌跡等計算武器提前發射的時間。火力單元發射時刻計算的誤差實際上從側面反映的就是命中概率。火控系統通過光電系統獲取攔截目標的參數,以及火力單元的參數,結合火控解算時間和數據傳輸時間等因素,進行綜合分析計算,再由外推的攔截點來反推出各個火力單元發射的不同時刻,如圖3所示。

圖3 分布式火控同一攔截點射擊示意圖Fig.3 Skectch of shooting for one coming point in distributed fire-control system
(6) 超近程防御武器火控原理模型與算法的研究
火控原理模型和算法根據系統的作戰流程采用模塊化設計方法。其主要模型與算法模塊如下圖4所示。
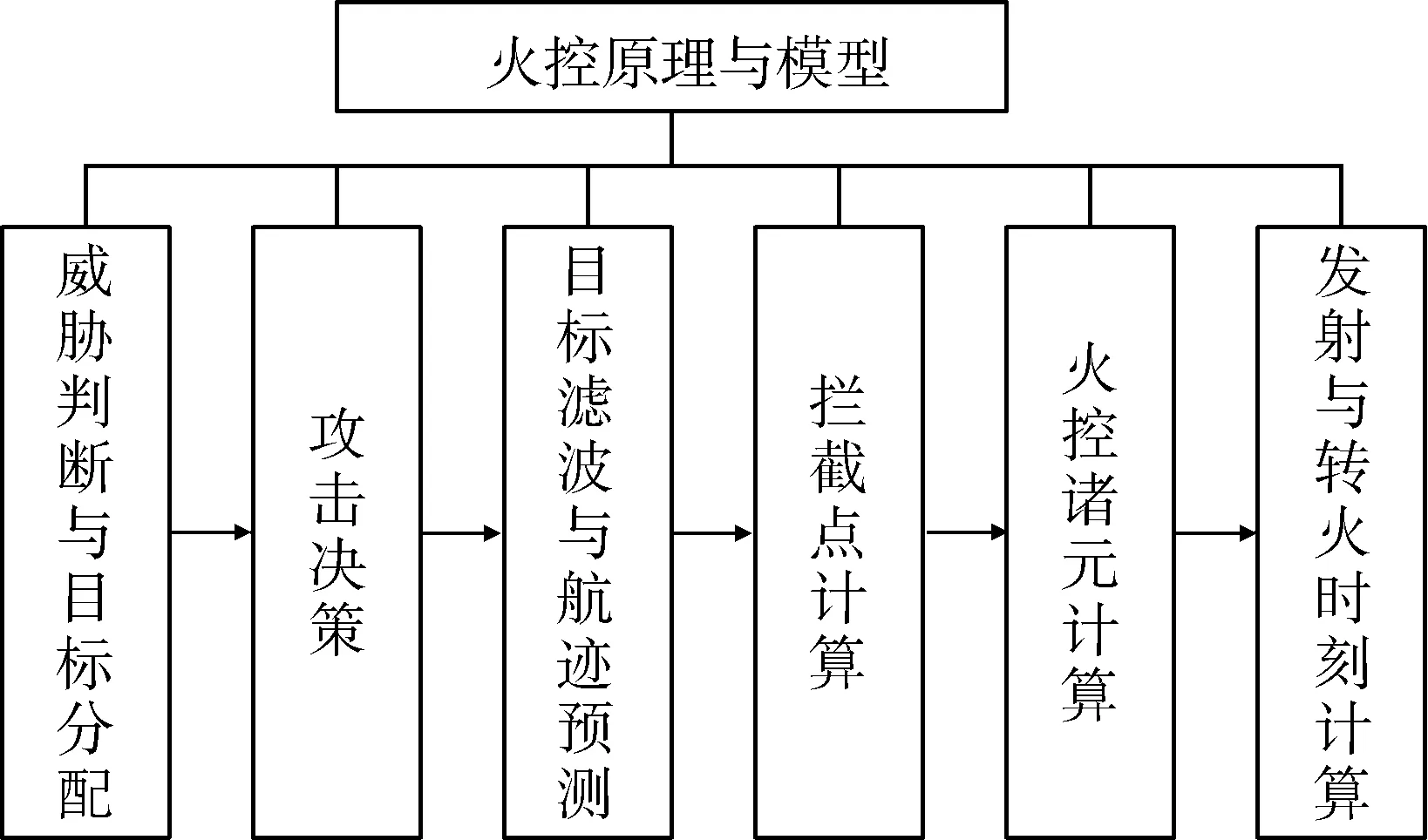
圖4 火控原理與算法結構圖Fig.4 Fire control principle and algorithm diagram
威脅判斷與目標分配模塊根據威脅判定規則評定來襲目標的威脅等級[12],由此來完成對目標作戰單元的分配。威脅評定方法主要根據目標到達時間、相對距離、目標數量與防護目標的重要性4個方面進行加權評定;分配算法則根據航路捷徑與火力單元的武器數量綜合考慮。
攻擊決策模塊通過預置攔截點給火力單元提供攻擊決策,并判斷來襲目標是否滿足攻擊條件,組織火力。
目標參數濾波與航跡預測模塊對目標運動參數進行濾波融合處理,同時對目標未來軌跡進行預測。濾波與預測方法包括卡爾曼濾波、α-β-γ濾波、最小二乘估計方法等諸多方法[13]。
預置攔截點與火控諸元計算模塊根據預測的目標運動參數(航向、速度等)、目標飛行時間以及攔截器的運動計算攔截目標的預置點,以及火力單元應該轉動的俯仰角、方位角。預定攔截點的計算方法采用彈目相對運動方程求解的方法。諸元的計算則根據預定攔截點位置進行計算。
(7) 超近程防御武器火控系統諸元解算技術研究
火控諸元的計算主要是要求解彈頭與目標相遇的問題,其實質是確定武器與目標運動在空間相遇點的位置并計算出武器未來點的高低方位角。預定攔截點的計算方法采用彈目相對運動方程求解的方法。諸元的計算則根據預定攔截點位置進行計算。由于該系統是由多個火力單元組成的分布式火控系統,在計算預先攔截點與火控諸元的過程中,坐標系的選定和建立以及攔截武器彈道方程的建立是求解彈目相對運動的基礎。可以防御陣地中心為坐標系原點建立空間直角坐標系,x軸與目標航路在水平面上的投影平行,正向與目標航向相反;y軸與x軸垂直;z軸垂直于Oxy平面向上為正。空間直角坐標系為慣性參考系,主要用于確定目標彈的中心位置、空間姿態等。目標彈坐標系的原點O1為目標彈的質心位置,O1x1軸沿目標彈的縱軸,指向下為正方向;O1z1軸位于過質心點的鉛直縱向對稱面與橫向對稱面的交線,指向上為正;O1y1按右手法則確定,目標彈坐標系為動坐標系。其攔截坐標關系如圖5所示(其中Mq為預定攔點)。
3 目標航跡外推仿真分析
通過上述關鍵技術的梳理,在以光電為基礎的分布式火控系統中,結合系統的各項誤差,光電的測距精度、位置精度、火力單元的隨動精度和散布精度等因素,通過卡爾曼、最小二乘估計、線性最小二乘法等方法,對目標航跡進行簡要的仿真,得到目標的外推航跡及誤差,如圖6所示。
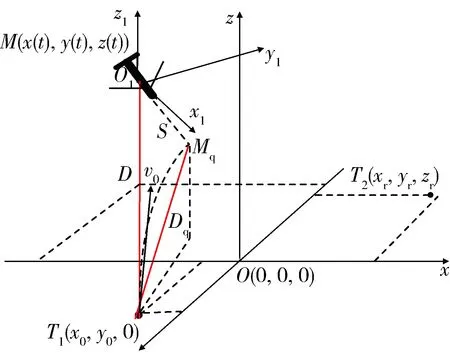
圖5 攔截坐標關系圖Fig.5 Intercept coordinate relations figure
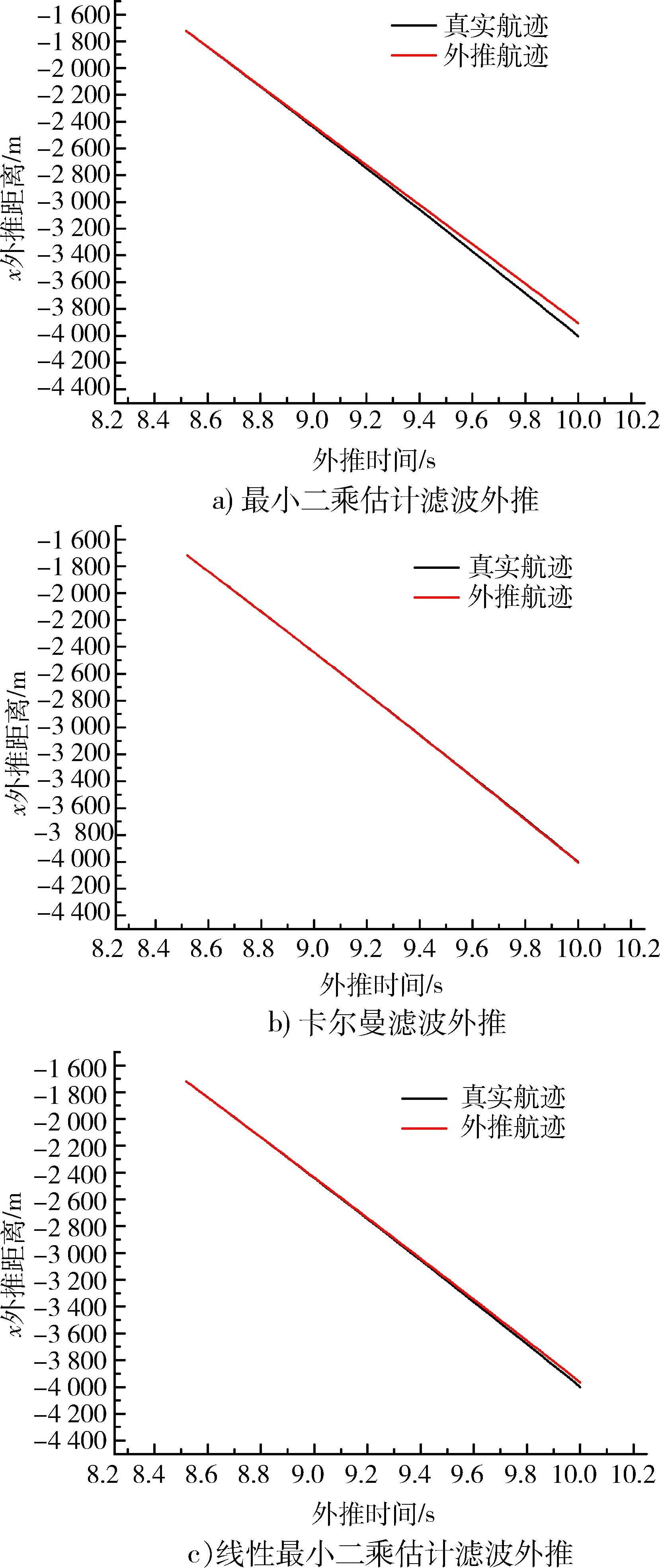
圖6 目標航跡外推仿真Fig.6 Object trajectory prediction simulation
仿真模擬勻加速直線運動,以初速度以1 240 m/s的速度來襲,其中加速度為124 m/s2,在8 000 m處開始跟蹤測量,對測量疊加噪聲。跟蹤8.5 s后,外推1.5 s。分別以不同的濾波算法外推仿真,得到結果如圖6所示,仿真均以x向為例,其中右圖為局部放大。
由圖6可以看出,隨著外推時間越長其產生的誤差就越大,而且外推攔截點的精度決定了攔截的精度和毀傷效果,這是非常重要的。從仿真的結果來看,采用線性最小二乘法外推誤差為35.82 m,采用最小二乘法外推誤差為103.15 m,采用卡爾曼濾波外推的效果較好,誤差僅為5.15 m。
4 結束語
隨著戰爭形式由平臺中心戰向信息戰的轉變,超近程防空的技術需求和重要性越來越明顯。不同于傳統的火控系統,要地的超近程防空分布式火控系統具有許多新的特點,因此在原有理論與方法的基礎上,需要提出新的研究思路和分析方法。本文針對超近程防空火控系統的體系結構及關健技術問題進行了研究探討和仿真,為超近程防空分布式火控系統的設計與實現提供了一些新的思路。相信隨著理論與實踐的不斷結合,該項研究將更加深入。
本文初步探討了超近程防護系統的綜合設計技術,給出了系統的基本構成與功能,提出了系統綜合設計的主要研究內容,并分析了系統綜合設計的幾項關鍵技術,對于采用各種濾波算法來提高目標航跡外推的準確性,還需要再進一步深入研究。
參考文獻:
[1] 王欽利,谷曉偉,李小龍,等.基于高機動條件下的坦克火控系統[J].兵工自動化,2012,31(3):19-21.
WANG Qin-li.GU Xiao-wei.LI Xiao-long,et al.Tank Fire Control System Under High-Speed State[J].Ordance Industry Automation,2012,31(3):19-21.
[2] 朱元昌.分布式防空武器系統仿真平臺及關鍵技術研究[D].南京:南京理工大學,2004.
Zhu Yuan-chang. The Distributed Simulation Platform and Key Technology Research for Air-Defense Weapon System[D].Nanjing:Nanjing University of Science and Technology,2004.
[3] 孫隆和.網絡瞄準及相關技術——瞄準和打擊活動目標[J].電光與控制, 2005,12(3):1-5.
SUN Long-he.Networked Targeting and the Relative Technologies——Targeting and Striking of Moving Targets[J].Electronics Optics & Control,2005,12(3):1-5.
[4] 藍偉華.火控系統誤差與雷達型空空導彈截獲目標概率計算[J].電光與控制, 2004,11(3):14-16.
LAN Wei-hua. Error of FCS and Calculation of Interception Probability for Radar Guided Air-to-Air Missiles[J]. Electronics Optics & Control,2005,11(3):14-16.
[5] 史志富,趙創社,劉海燕,等.機載火控系統動態精度建模與穩定性研究[J].彈箭與制導學報,2010,30(2):35-40.
SHI Zhi-fu,ZHAO Chuang-she,LIU Hai-yan,et al. Study on Dynamic Precision Model and Stability of Airborne Fire Control System[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(2):35-40.
[6] 畢衡光,敖志剛,王偉,等.防空武器火力控制效能[J].兵工自動化,2011,30(10):13-15.
BI Heng-guang,AO Zhi-gang,WANG Wei, et al.Research on Fire Control Efficiency of Air Defence Weapon[J]. Ordanance Industry Automa,2011,30(10):13-15.
[7] 伍干東, 王炳森,楊文軍,等.美國本土防空體系建設特點分析[J]. 兵工自動化,2012,31(2):38-39.
WU Gan-dong,WANG Bing-sen,YANG Wen-jun, et al.Analysis on Characteristic of American MainLand’s Aerial Defence System[J]. Ordanance Industry Automation,2012,31(2):38-39.
[8] 王豐,李日華,尹付梅,等.基于優度評價方法的空襲目標威脅評估[J].兵工自動化,2011,30(7):39-41.
WANG Feng,LI Ri-hua,YIN Fu-mei, et al.Threat Evaluation of Air Attack Target Based on Priority Degree Evaluation Method[J].Ordanance Industry Automation,2011,30(7):39-41.
[9] 劉蕊,李相民,劉立佳,等.要地防空空襲目標主攻方向判斷[J].兵工自動化,2012,31(10):60-63.
LIU Rui,LI Xiang-min,LIU Li-jia, et al.Attack Direction Differentiation of Air Striking in Point Air Defence[J].Ordanance Industry Automation,2012,31(10):60-63.
[10] 董濤,劉付顯,李響.末端多層反導作戰的任務分解[J].現代防御技術,2012,40(4):17-20.
DONG Tao,LIU Fu-xian,LI Xiang.Task Decomposition of Tenninal Phrase Multilayer Antimissile Operation[J].Modern Defence Technology,2012,40(4):17-20.
[11] 朱銀生,趙創社,史志富,等.機載光電穩瞄系統實時被動測距方法研究[J].應用光學,2010,31(6):888-892.
ZHU Yin-sheng,ZHAO Chuang-she,SHI Zhi-fu,et al.Real-Time Passive Ranging for Airborne Electro-Optical Stabilized Sight System[J].Journal of Applied Optics,2010,31(6):888-892.
[12] 李金剛,谷敏. 最小二乘濾波在某型火控系統信息處理中的應用[J].航天電子對抗,2006,22(3):54-56.
LI Jin-gang,GU Min.Appliance of LS-Wave-Sieve in the Information Disposal of a Fire Control System[J].Aerospace Electronic Warfare,2006,22(3):54-56.
[13] 許彥偉,蔡惠智,劉云濤,等. 多亮點聲納目標軌跡起始技術[J].聲學技術,2012,31(4):362-365.
XU Yan-wei,CAI Hui-zhi,LIU Yun-tao,et al.Research On Track Initiation of Multi-Highlight Sonar Target[J].Technical Acoustics,2012,31(4):362-365.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32